Vous aimerez peut-être aussi
- Speed Control of DC MotorDocument15 pagesSpeed Control of DC Motorkrishnareddy_chintalaPas encore d'évaluation
- Starting Methods of A DC MotorDocument8 pagesStarting Methods of A DC Motoragreykato100% (1)
- Speeed ControlDocument3 pagesSpeeed ControlChristine GomezPas encore d'évaluation
- Electric Machines Lab: Open Ended Lab ReportDocument8 pagesElectric Machines Lab: Open Ended Lab ReportSaadPas encore d'évaluation
- Em 1 TestingDocument13 pagesEm 1 TestingAravindPas encore d'évaluation
- DC Shunt Motor Speed ControlDocument7 pagesDC Shunt Motor Speed Controleric wahomePas encore d'évaluation
- Chap 10 Part IIDocument5 pagesChap 10 Part IITynoh MusukuPas encore d'évaluation
- Experiment 2Document4 pagesExperiment 2dhruvmistry300Pas encore d'évaluation
- Ame 3L Experiment 4 Speed Control of DC Motor by Armature Resistance Control AIMDocument7 pagesAme 3L Experiment 4 Speed Control of DC Motor by Armature Resistance Control AIMCeline Kate BentayaoPas encore d'évaluation
- DC Motors Speed Control - ModDocument9 pagesDC Motors Speed Control - ModAnuja VarghesePas encore d'évaluation
- Starting, Speed Control....Document6 pagesStarting, Speed Control....dickmjoloPas encore d'évaluation
- Ame 3L Experiment 3 Speed Control of DC Motor by Field Resistance Control AIMDocument7 pagesAme 3L Experiment 3 Speed Control of DC Motor by Field Resistance Control AIMCeline Kate BentayaoPas encore d'évaluation
- 25-Feb-2020 11B Converter Fed and Chopper Fed DC DrivesDocument16 pages25-Feb-2020 11B Converter Fed and Chopper Fed DC DrivesATULYA ALOK 17BEE0065Pas encore d'évaluation
- DC & AC DrivesDocument12 pagesDC & AC DrivesPKPas encore d'évaluation
- Speed Control and Starting of A DC MotorDocument56 pagesSpeed Control and Starting of A DC MotorCarlos Arias LuyandoPas encore d'évaluation
- Speed Control of MotorDocument5 pagesSpeed Control of MotorPrabuddha ChakrabortyPas encore d'évaluation
- Regenerative Braking of Induction MotorDocument27 pagesRegenerative Braking of Induction MotorcoolkannaPas encore d'évaluation
- Motor EletrikDocument6 pagesMotor EletrikAshok GuevaraPas encore d'évaluation
- Voltage, Frequency, and Phase-Difference Angle Control of PWM Inverters-Fed Two-Phase Induction MotorsDocument7 pagesVoltage, Frequency, and Phase-Difference Angle Control of PWM Inverters-Fed Two-Phase Induction MotorsinfodotzPas encore d'évaluation
- Typical Power Electronics Circuits in Power Systems: 9.1 HVDC Converter/inverterDocument10 pagesTypical Power Electronics Circuits in Power Systems: 9.1 HVDC Converter/inverterCông Tử Họ NguyễnPas encore d'évaluation
- Speed Control of DC MotorsDocument2 pagesSpeed Control of DC Motorsmsd183wkPas encore d'évaluation
- Speed Control of DC MotorsDocument27 pagesSpeed Control of DC MotorsBabuKannanPas encore d'évaluation
- Sinusoidal PMAC Motor - 6th AprilDocument4 pagesSinusoidal PMAC Motor - 6th AprilSourav KumarPas encore d'évaluation
- Wardleonard TheoryDocument6 pagesWardleonard TheoryKarlo MabulacPas encore d'évaluation
- Synch Alternator Exp6Document8 pagesSynch Alternator Exp6Prìyañshú GuptãPas encore d'évaluation
- Control Material Module IIDocument15 pagesControl Material Module IIAbiodun MustaphaPas encore d'évaluation
- FQC IISC-250kvaDocument23 pagesFQC IISC-250kvaDeepak GehlotPas encore d'évaluation
- Speed Control of DC MotorDocument4 pagesSpeed Control of DC MotorjitbakPas encore d'évaluation
- Booster TransformerDocument2 pagesBooster TransformerShivam JhaPas encore d'évaluation
- Speed Control of Induction MotorDocument33 pagesSpeed Control of Induction MotorMaham NaeemPas encore d'évaluation
- Karakteristik Motor KomponDocument14 pagesKarakteristik Motor KomponPola RismaPas encore d'évaluation
- 2.6.3 Characteristic of Compound-Wound MotorDocument14 pages2.6.3 Characteristic of Compound-Wound MotorPaulo GalleraPas encore d'évaluation
- A Space Vector-Based Rectifier Regulator For AC DC AC ConvertersDocument7 pagesA Space Vector-Based Rectifier Regulator For AC DC AC ConvertersSofia FrlPas encore d'évaluation
- Speed Control of DC Shunt Motor: A) Field Current Control B) Armature Voltage ControlDocument8 pagesSpeed Control of DC Shunt Motor: A) Field Current Control B) Armature Voltage ControlAkshit VSPas encore d'évaluation
- Ashish Singh 2K20CEEE11 Exp-6Document6 pagesAshish Singh 2K20CEEE11 Exp-6Ashish SinghPas encore d'évaluation
- Chapter 2 - EE - 6th - SEM - ED - VS - Characteristic - DCM - L9 - FinalDocument14 pagesChapter 2 - EE - 6th - SEM - ED - VS - Characteristic - DCM - L9 - Finalshubhamgarna.ytPas encore d'évaluation
- Space-Vector Modulation in A Two-Phase Induction Motor Drive For Constant-Power OperationDocument8 pagesSpace-Vector Modulation in A Two-Phase Induction Motor Drive For Constant-Power OperationinfodotzPas encore d'évaluation
- Lab 11 (Hardware Practice) PDFDocument7 pagesLab 11 (Hardware Practice) PDFzeeshan shaukatPas encore d'évaluation
- Magnetic AmplifiersDocument2 pagesMagnetic AmplifiersEnki TecPas encore d'évaluation
- DC Machines Lab ManualDocument72 pagesDC Machines Lab ManualPuneeth PuniPas encore d'évaluation
- Speed Control of A Single Phase Induction Motor: Knob, Which Is CommonlyDocument16 pagesSpeed Control of A Single Phase Induction Motor: Knob, Which Is CommonlygalaxyPas encore d'évaluation
- Chap3 Part2Document22 pagesChap3 Part2Alazar GetachewPas encore d'évaluation
- Santosh GuruDocument10 pagesSantosh Guru2108010eePas encore d'évaluation
- A Three Phase Induction Motor Is Basically A Constant Speed Motor So ItDocument39 pagesA Three Phase Induction Motor Is Basically A Constant Speed Motor So ItManish MakwanaPas encore d'évaluation
- Fig. 2 (A) Self Excited Induction GeneratorDocument7 pagesFig. 2 (A) Self Excited Induction GeneratorLaxmikant BagalePas encore d'évaluation
- DcdrivesDocument17 pagesDcdrivesMogaka LucasPas encore d'évaluation
- Electric DrivesDocument32 pagesElectric DrivessangsangicnuPas encore d'évaluation
- DC Motors Types and CharacteristicsDocument4 pagesDC Motors Types and Characteristics22wh1a0465Pas encore d'évaluation
- Unit 2 - ED - 2ND PARTDocument21 pagesUnit 2 - ED - 2ND PARTMohit L.E. 008Pas encore d'évaluation
- Power Quality Improvement Using Dynamic Voltage Restorer (DVR)Document4 pagesPower Quality Improvement Using Dynamic Voltage Restorer (DVR)Timothy AsarePas encore d'évaluation
- Speed Control of Induction MotorDocument26 pagesSpeed Control of Induction MotorrajasekaranPas encore d'évaluation
- Unit-5 Speed Control of Three Phase Induction MotorDocument16 pagesUnit-5 Speed Control of Three Phase Induction MotorAshok P100% (1)
- Project Report For Completion OF B. Tech. in Electrical EngineeringDocument57 pagesProject Report For Completion OF B. Tech. in Electrical EngineeringetasureshPas encore d'évaluation
- Electrical Machines Lecture 5Document14 pagesElectrical Machines Lecture 5maximelus243Pas encore d'évaluation
- Scalar Control of Ac DrivesDocument38 pagesScalar Control of Ac Drivessureshy-ee213Pas encore d'évaluation
- DC Motors: 2.0 ObjectivesDocument16 pagesDC Motors: 2.0 ObjectivesBelayet RonyPas encore d'évaluation
- Direct Current Motor: UNIT-9Document19 pagesDirect Current Motor: UNIT-9Keshav RathiPas encore d'évaluation
- Motor Drives BY K .Sunil Kumar Griet-Power ElectronicsDocument4 pagesMotor Drives BY K .Sunil Kumar Griet-Power ElectronicsKalyan KumarPas encore d'évaluation
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetD'EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetPas encore d'évaluation
- Hisam INVESTIGATION OF KRAFT INSULATING PAPER PROPERTIES UNDER ACCELERATED THERMAL AGEING ENVIRONMENTDocument67 pagesHisam INVESTIGATION OF KRAFT INSULATING PAPER PROPERTIES UNDER ACCELERATED THERMAL AGEING ENVIRONMENTMohd Izzat Abd GhaniPas encore d'évaluation
- Energies: Dual-Temperature Evaluation of A High-Temperature Insulation System For Liquid-Immersed TransformerDocument15 pagesEnergies: Dual-Temperature Evaluation of A High-Temperature Insulation System For Liquid-Immersed TransformerMohd Izzat Abd GhaniPas encore d'évaluation
- Mohd Izzat Bin Abd Ghani: MYR 0.00 MYR 104.94Document4 pagesMohd Izzat Bin Abd Ghani: MYR 0.00 MYR 104.94Mohd Izzat Abd GhaniPas encore d'évaluation
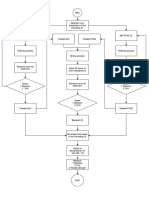
- Untitled DiagramDocument1 pageUntitled DiagramMohd Izzat Abd GhaniPas encore d'évaluation
- Viscosity: High Quality Transformer Oils Are Formulated To Have Low ViscosityDocument2 pagesViscosity: High Quality Transformer Oils Are Formulated To Have Low ViscosityMohd Izzat Abd GhaniPas encore d'évaluation
- Payment Schedule For Local Student (Full Time Master Program by Research)Document14 pagesPayment Schedule For Local Student (Full Time Master Program by Research)Mohd Izzat Abd GhaniPas encore d'évaluation
- Oxidation Stability Enhancement of A Blend of Mineral and Synthetic Ester OilsDocument5 pagesOxidation Stability Enhancement of A Blend of Mineral and Synthetic Ester OilsMohd Izzat Abd GhaniPas encore d'évaluation
- Hypertrans Iec 60296 2012 (Latest 2017)Document3 pagesHypertrans Iec 60296 2012 (Latest 2017)Mohd Izzat Abd GhaniPas encore d'évaluation
- Breakdown and Prebreakdown Characteristics of Mixed Liquid DieleDocument4 pagesBreakdown and Prebreakdown Characteristics of Mixed Liquid DieleMohd Izzat Abd GhaniPas encore d'évaluation
- 2 Induction Motor Scalar Lecture 2Document18 pages2 Induction Motor Scalar Lecture 2Mohd Izzat Abd GhaniPas encore d'évaluation
- 3 Power Flow-Gauss Seidel UlearnDocument18 pages3 Power Flow-Gauss Seidel UlearnMohd Izzat Abd Ghani100% (2)
- Hypertrans Iec 60296 2012 (Latest 2017)Document3 pagesHypertrans Iec 60296 2012 (Latest 2017)Mohd Izzat Abd GhaniPas encore d'évaluation
- Bekp 4843 Mid-TermDocument3 pagesBekp 4843 Mid-TermMohd Izzat Abd Ghani100% (1)
- Assignment AziahDocument10 pagesAssignment AziahMohd Izzat Abd GhaniPas encore d'évaluation
- Surat Pengenalan Fakulti HoyaDocument4 pagesSurat Pengenalan Fakulti HoyaMohd Izzat Abd GhaniPas encore d'évaluation
- Idmt RelayDocument64 pagesIdmt RelayMohd Izzat Abd GhaniPas encore d'évaluation
- Methods Results Analysis Results: (Poster Title SV Name Group)Document1 pageMethods Results Analysis Results: (Poster Title SV Name Group)Mohd Izzat Abd GhaniPas encore d'évaluation
- Newton Raphson MethodDocument26 pagesNewton Raphson MethodMohd Izzat Abd GhaniPas encore d'évaluation
- Surat Pengenalan Fakulti FirstSolarDocument4 pagesSurat Pengenalan Fakulti FirstSolarMohd Izzat Abd GhaniPas encore d'évaluation
- A - OBE For Student BEKU 4861Document1 pageA - OBE For Student BEKU 4861Mohd Izzat Abd GhaniPas encore d'évaluation
- Guidelines For Preparation of Final Year Project ReportDocument36 pagesGuidelines For Preparation of Final Year Project ReportMohd Izzat Abd GhaniPas encore d'évaluation
- Application 1 - Running Led: Experiment 4Document5 pagesApplication 1 - Running Led: Experiment 4Mohd Izzat Abd GhaniPas encore d'évaluation
- Universiti Teknikal Malaysia Melaka: Kurikulum VitaeDocument4 pagesUniversiti Teknikal Malaysia Melaka: Kurikulum VitaeMohd Izzat Abd GhaniPas encore d'évaluation
- A - OBE For Student BEKU 4861Document12 pagesA - OBE For Student BEKU 4861Mohd Izzat Abd GhaniPas encore d'évaluation
- Application For The Post of Electrical Engineering TraineeDocument2 pagesApplication For The Post of Electrical Engineering TraineeMohd Izzat Abd GhaniPas encore d'évaluation
- Teaching Plan: Engineering Mathematics and Statistics Semester 1Document3 pagesTeaching Plan: Engineering Mathematics and Statistics Semester 1Mohd Izzat Abd GhaniPas encore d'évaluation
- Lab 3 Control System BEKB 3551Document5 pagesLab 3 Control System BEKB 3551Mohd Izzat Abd Ghani0% (1)
- Answer Scheme Lab AssessmentDocument1 pageAnswer Scheme Lab AssessmentMohd Izzat Abd GhaniPas encore d'évaluation
- La Naval Drug Co Vs CA G R No 103200Document2 pagesLa Naval Drug Co Vs CA G R No 103200UE LawPas encore d'évaluation
- Global Review of Enhances Geothermal SystemDocument20 pagesGlobal Review of Enhances Geothermal SystemKatherine RojasPas encore d'évaluation
- MushroomDocument8 pagesMushroomAkshay AhlawatPas encore d'évaluation
- Cultural Safety Jesus SantiniDocument2 pagesCultural Safety Jesus Santinisq4mc4vqckPas encore d'évaluation
- Revamping An Integrated Hydrocracker and Lube Base Oil UnitDocument5 pagesRevamping An Integrated Hydrocracker and Lube Base Oil UnitVyacheslavPas encore d'évaluation
- Nfjpia Mockboard 2011 BLTDocument12 pagesNfjpia Mockboard 2011 BLTVon Wilson AjocPas encore d'évaluation
- Java ProgramsDocument36 pagesJava ProgramsPrashanth MohanPas encore d'évaluation
- Shareholder Agreement 06Document19 pagesShareholder Agreement 06Josmar TelloPas encore d'évaluation
- Bsa 32 Chap 3 (Assignment) Orquia, Anndhrea S.Document3 pagesBsa 32 Chap 3 (Assignment) Orquia, Anndhrea S.Clint Agustin M. RoblesPas encore d'évaluation
- Layer 3 Managed 8 10G Port Switch Controller: RTL9303-CGDocument55 pagesLayer 3 Managed 8 10G Port Switch Controller: RTL9303-CG박윤지100% (1)
- 20151201-Baltic Sea Regional SecurityDocument38 pages20151201-Baltic Sea Regional SecurityKebede MichaelPas encore d'évaluation
- DX225LCA DX340LCA Sales MaterialDocument46 pagesDX225LCA DX340LCA Sales MaterialAntonio Carrion100% (9)
- Tesco Travel Policy BookletDocument64 pagesTesco Travel Policy Bookletuser001hPas encore d'évaluation
- Good Practice On The Project "Improve The Food Security of Farming Families Affected by Volatile Food Prices" (Nutrition Component) in CambodiaDocument2 pagesGood Practice On The Project "Improve The Food Security of Farming Families Affected by Volatile Food Prices" (Nutrition Component) in CambodiaADBGADPas encore d'évaluation
- HK Magazine 03082013Document56 pagesHK Magazine 03082013apparition9Pas encore d'évaluation
- GTT NO96 LNG TanksDocument5 pagesGTT NO96 LNG TanksEdutamPas encore d'évaluation
- 4 A Industrial RevolutionDocument41 pages4 A Industrial Revolutionabekhti2008Pas encore d'évaluation
- Gist of FIEO ServicesDocument1 pageGist of FIEO Servicessanjay patraPas encore d'évaluation
- Review On A Protective Scheme For Wind Power Plant Using Co-Ordination of Overcurrent Relay-NOTA TECNICADocument5 pagesReview On A Protective Scheme For Wind Power Plant Using Co-Ordination of Overcurrent Relay-NOTA TECNICAEdgardo Kat ReyesPas encore d'évaluation
- LIC Product PositioningDocument15 pagesLIC Product PositioningRasika Pawar-HaldankarPas encore d'évaluation
- Group9 SecADocument7 pagesGroup9 SecAshivendrakadamPas encore d'évaluation
- Juegos PPCDocument8 pagesJuegos PPCikro995Pas encore d'évaluation
- Energy Facts PDFDocument18 pagesEnergy Facts PDFvikas pandeyPas encore d'évaluation
- Compose Testing CheatsheetDocument1 pageCompose Testing CheatsheetEstampados SIn ApellidoPas encore d'évaluation
- Lab ManualDocument15 pagesLab ManualsamyukthabaswaPas encore d'évaluation
- Technical Specification For Flue Gas Desulfurization of Thermal Power Plant Limestone / Lime - Gypsum MethodDocument17 pagesTechnical Specification For Flue Gas Desulfurization of Thermal Power Plant Limestone / Lime - Gypsum Methodpramod_tryPas encore d'évaluation
- Project Proposal - Articulation SessionsDocument8 pagesProject Proposal - Articulation SessionsJhay-are PogoyPas encore d'évaluation
- LEBV4830Document371 pagesLEBV4830anton100% (1)
- Sterling PumpeDocument20 pagesSterling PumpesrdzaPas encore d'évaluation
- AutoCAD Civil 3D Performance Optimization 2Document5 pagesAutoCAD Civil 3D Performance Optimization 2Renukadevi RptPas encore d'évaluation