Vous aimerez peut-être aussi
- Tables of Laguerre Polynomials and Functions: Mathematical Tables Series, Vol. 39D'EverandTables of Laguerre Polynomials and Functions: Mathematical Tables Series, Vol. 39Pas encore d'évaluation
- Answers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesD'EverandAnswers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesÉvaluation : 1.5 sur 5 étoiles1.5/5 (2)
- Factoring and Algebra - A Selection of Classic Mathematical Articles Containing Examples and Exercises on the Subject of Algebra (Mathematics Series)D'EverandFactoring and Algebra - A Selection of Classic Mathematical Articles Containing Examples and Exercises on the Subject of Algebra (Mathematics Series)Pas encore d'évaluation
- The Variational Approach To Optimal ControlDocument48 pagesThe Variational Approach To Optimal ControlMona Ali100% (1)
- Unconstrained OptimizationDocument11 pagesUnconstrained OptimizationSuparna2Pas encore d'évaluation
- Linear ControlDocument22 pagesLinear ControlElvis YuPas encore d'évaluation
- Calculus of VariationsDocument14 pagesCalculus of VariationsJose Luis CondoriPas encore d'évaluation
- Iron Man Poster - Science Behind The ExtremisDocument1 pageIron Man Poster - Science Behind The ExtremisNadya AmaliaPas encore d'évaluation
- Chapter 4 PDEDocument17 pagesChapter 4 PDEHui JingPas encore d'évaluation
- Calculus of VariationsDocument61 pagesCalculus of VariationsPedro Palacios AvilaPas encore d'évaluation
- Calculus of VariationsDocument36 pagesCalculus of VariationsAndreas NeophytouPas encore d'évaluation
- AP Calculus AB: Free-Response QuestionsDocument7 pagesAP Calculus AB: Free-Response QuestionsAman NAGUPas encore d'évaluation
- MATH2045: Vector Calculus & Complex Variable TheoryDocument50 pagesMATH2045: Vector Calculus & Complex Variable TheoryAnonymous 8nJXGPKnuW100% (2)
- MATH0043 2 - Calculus of VariationsDocument9 pagesMATH0043 2 - Calculus of VariationsYuen MokPas encore d'évaluation
- Linear Systems and MatricesDocument49 pagesLinear Systems and MatricesHasan Ali ErginPas encore d'évaluation
- Porat A Gentle Introduction To Tensors 2014 PDFDocument87 pagesPorat A Gentle Introduction To Tensors 2014 PDFManuel nuño bustamantePas encore d'évaluation
- Tutorial 5 - Derivative of Multivariable FunctionsDocument2 pagesTutorial 5 - Derivative of Multivariable FunctionsИбрагим Ибрагимов0% (1)
- Functions: Ecc 3001 Engineering Mathematics 1Document39 pagesFunctions: Ecc 3001 Engineering Mathematics 1nur hashimahPas encore d'évaluation
- The Euler-Lagrange EquationDocument13 pagesThe Euler-Lagrange EquationFeiPas encore d'évaluation
- Runge-Kutta Methods for Solving ODEsDocument10 pagesRunge-Kutta Methods for Solving ODEsaislah_1Pas encore d'évaluation
- Math662TB 09SDocument712 pagesMath662TB 09SGadhoumiWalid100% (1)
- Le Chatelier Principle as a Corollary to the Generalized Envelope TheoremDocument10 pagesLe Chatelier Principle as a Corollary to the Generalized Envelope Theoremlev76Pas encore d'évaluation
- Weighted Residual Method - FEMDocument37 pagesWeighted Residual Method - FEMAnal Ranjan SenguptaPas encore d'évaluation
- Lifo Fifo Avco ReinforcementDocument2 pagesLifo Fifo Avco ReinforcementMildred C. WaltersPas encore d'évaluation
- HJB EquationsDocument38 pagesHJB EquationsbobmezzPas encore d'évaluation
- Markov Chains Guidebook: Discrete Time Models and ApplicationsDocument23 pagesMarkov Chains Guidebook: Discrete Time Models and ApplicationsSofoklisPas encore d'évaluation
- How To Find Eigenvalues and EigenvectorsDocument21 pagesHow To Find Eigenvalues and EigenvectorsHưng Đoàn VănPas encore d'évaluation
- (ADVANCE ABSTRACT ALGEBRA) Pankaj Kumar and Nawneet HoodaDocument82 pages(ADVANCE ABSTRACT ALGEBRA) Pankaj Kumar and Nawneet HoodaAnonymous RVVCJlDU6Pas encore d'évaluation
- Coupled 1st Order ODEsDocument28 pagesCoupled 1st Order ODEsMuhammad Ahtisham AsifPas encore d'évaluation
- 2016 Complex Analysis Problems SolutionsDocument102 pages2016 Complex Analysis Problems Solutionsas_5kPas encore d'évaluation
- Functions I: Supporting Australian Mathematics ProjectDocument31 pagesFunctions I: Supporting Australian Mathematics ProjectLovely Chetan0% (1)
- Principles of Least SquaresDocument44 pagesPrinciples of Least SquaresdrdahmanPas encore d'évaluation
- Factorial: Problem Code: FCTRLDocument4 pagesFactorial: Problem Code: FCTRLNitish KumarPas encore d'évaluation
- Chapter8 Matrices and Determinants: Advanced Level Pure MathematicsDocument37 pagesChapter8 Matrices and Determinants: Advanced Level Pure MathematicsKelvin Cheung100% (1)
- Accounting Information Systems Final ExamDocument16 pagesAccounting Information Systems Final Examrikansha100% (1)
- Oscillation of Nonlinear Neutral Delay Differential Equations PDFDocument20 pagesOscillation of Nonlinear Neutral Delay Differential Equations PDFKulin DavePas encore d'évaluation
- Relativity Demystified ErrataDocument9 pagesRelativity Demystified ErrataRamzan8850Pas encore d'évaluation
- Mat DLP KSSM t5 Chapter 8 Mathematical ModelingDocument18 pagesMat DLP KSSM t5 Chapter 8 Mathematical ModelingMARIANIPas encore d'évaluation
- Exponential Worksheet1Document3 pagesExponential Worksheet1edren malaguenoPas encore d'évaluation
- Euler's and Heun's Methods: Douglas Wilhelm Harder, M.Math. LELDocument72 pagesEuler's and Heun's Methods: Douglas Wilhelm Harder, M.Math. LELwasnabePas encore d'évaluation
- Lesson 8 Teacher's Guide Equations Involving Logarithms: ObjectiveDocument6 pagesLesson 8 Teacher's Guide Equations Involving Logarithms: ObjectiveАрхи́пPas encore d'évaluation
- Metric Spaces PDFDocument33 pagesMetric Spaces PDFmatty20113Pas encore d'évaluation
- EC6502-Principal of Digital Signal Processing - 2013 - Regulation PDFDocument13 pagesEC6502-Principal of Digital Signal Processing - 2013 - Regulation PDFSuba Sara SubaPas encore d'évaluation
- Lecture Notes (Chapter 2.5 Application of Multiple Integral)Document12 pagesLecture Notes (Chapter 2.5 Application of Multiple Integral)shinee_jayasila2080Pas encore d'évaluation
- Advanced Numerical AnalysisDocument2 pagesAdvanced Numerical Analysisمهندس محمد محمدPas encore d'évaluation
- Lecture Notes PDFDocument143 pagesLecture Notes PDFPrateeti MukherjeePas encore d'évaluation
- Queueing Theory Basics and Computer System ModellingDocument110 pagesQueueing Theory Basics and Computer System Modellingjoystick2inPas encore d'évaluation
- Differential Equations LectureDocument2 pagesDifferential Equations LectureMath NerdPas encore d'évaluation
- Weber Arfken Mathematical Methods For Physicists CH 5 Selected Solutions PDFDocument6 pagesWeber Arfken Mathematical Methods For Physicists CH 5 Selected Solutions PDFUrielGranadosPas encore d'évaluation
- Ito ProcessDocument76 pagesIto ProcessAdrian d'AuvergnePas encore d'évaluation
- CH 02 Sec 02Document14 pagesCH 02 Sec 02datdude1415Pas encore d'évaluation
- Fourier Series Notes PDFDocument39 pagesFourier Series Notes PDFsudarshan poojaryPas encore d'évaluation
- Iterative Solution of Nonlinear Equations in Several VariablesD'EverandIterative Solution of Nonlinear Equations in Several VariablesPas encore d'évaluation
- Handbook of Numerical Methods for the Solution of Algebraic and Transcendental EquationsD'EverandHandbook of Numerical Methods for the Solution of Algebraic and Transcendental EquationsPas encore d'évaluation
- Applications of Variational Inequalities in Stochastic ControlD'EverandApplications of Variational Inequalities in Stochastic ControlÉvaluation : 2 sur 5 étoiles2/5 (1)
- Solutions Manual to Accompany Introduction to Quantitative Methods in Business: with Applications Using Microsoft Office ExcelD'EverandSolutions Manual to Accompany Introduction to Quantitative Methods in Business: with Applications Using Microsoft Office ExcelPas encore d'évaluation
- Basics of Light and Lighting UK 2013 VersionDocument52 pagesBasics of Light and Lighting UK 2013 VersionBogdan ManeaPas encore d'évaluation
- 15% Budget Personal FinancesDocument2 pages15% Budget Personal FinancesBogdan ManeaPas encore d'évaluation
- State Space ModelDocument5 pagesState Space ModelBogdan ManeaPas encore d'évaluation
- Lighting Design ConsiderationsDocument42 pagesLighting Design Considerationsshivam007Pas encore d'évaluation
- Transistor As Switch For 12vDocument4 pagesTransistor As Switch For 12vplmraj2Pas encore d'évaluation
- Visual Energy Work BookDocument104 pagesVisual Energy Work BookBogdan ManeaPas encore d'évaluation
- LM2596S ADJ Power Converter RegulatorDocument31 pagesLM2596S ADJ Power Converter RegulatorCadet RaparivoPas encore d'évaluation
- Break Out StrategyDocument69 pagesBreak Out Strategymirov95% (56)
- Servo MotorsDocument1 pageServo MotorsBogdan ManeaPas encore d'évaluation
- Colored Pale Blue Wide Black Lines A4Document1 pageColored Pale Blue Wide Black Lines A4Bogdan ManeaPas encore d'évaluation
- Shape Characterization ChapterDocument37 pagesShape Characterization ChapterBogdan ManeaPas encore d'évaluation
- MATLAB State Space Models TutorialDocument19 pagesMATLAB State Space Models TutorialBogdan ManeaPas encore d'évaluation
- State SpaceDocument9 pagesState SpaceBogdan ManeaPas encore d'évaluation
- A Iab 089258Document5 pagesA Iab 089258Bogdan ManeaPas encore d'évaluation
- 3 - Introduction To Optimal ControlDocument19 pages3 - Introduction To Optimal ControlBogdan ManeaPas encore d'évaluation
- 8 PontryaginDocument31 pages8 PontryaginBogdan ManeaPas encore d'évaluation
- 1 - Theory of Maxima and MinimaDocument31 pages1 - Theory of Maxima and MinimaBogdan ManeaPas encore d'évaluation
- State Space ModelDocument5 pagesState Space ModelBogdan ManeaPas encore d'évaluation
- Guide to Dynamic Programming Concepts and Computational ProcedureDocument18 pagesGuide to Dynamic Programming Concepts and Computational ProcedureBogdan ManeaPas encore d'évaluation
- 9.2-GAs in Optimal ControlDocument31 pages9.2-GAs in Optimal ControlBogdan ManeaPas encore d'évaluation
- 9.3.1-GA and Optimal ControlDocument12 pages9.3.1-GA and Optimal ControlBogdan ManeaPas encore d'évaluation
- 8 PontryaginDocument31 pages8 PontryaginBogdan ManeaPas encore d'évaluation
- 9.4-Optimal Control Problem and Genetic AlgorithmDocument3 pages9.4-Optimal Control Problem and Genetic AlgorithmBogdan ManeaPas encore d'évaluation
- Muh 37 1 6 1203 13Document13 pagesMuh 37 1 6 1203 13Bogdan ManeaPas encore d'évaluation
- 3 - Introduction To Optimal ControlDocument19 pages3 - Introduction To Optimal ControlBogdan ManeaPas encore d'évaluation
- 3 - Introduction To Optimal ControlDocument19 pages3 - Introduction To Optimal ControlBogdan ManeaPas encore d'évaluation
- 9.3.2-GA and Optimal ControlDocument9 pages9.3.2-GA and Optimal ControlBogdan ManeaPas encore d'évaluation
- Echevarria 14Document16 pagesEchevarria 14Bogdan ManeaPas encore d'évaluation
- 02 - Critical Customers Complains enDocument8 pages02 - Critical Customers Complains enKJDNKJZEF100% (1)
- Technical Publications: Direction 2190775 100Document21 pagesTechnical Publications: Direction 2190775 100zakaria alhosinyPas encore d'évaluation
- Artificial LiftDocument18 pagesArtificial LiftRasya RefanPas encore d'évaluation
- Control Fixed Bed ReactorsDocument4 pagesControl Fixed Bed ReactorsAddison JuttiePas encore d'évaluation
- 3.17. Creep EquationsDocument10 pages3.17. Creep Equationsruchit solankiPas encore d'évaluation
- Hard Disk DriveDocument4 pagesHard Disk DriveAbhishek AbhiPas encore d'évaluation
- Kepb003404 PDFDocument472 pagesKepb003404 PDFELIAS100% (1)
- 01chapter 5-1Document55 pages01chapter 5-1AhmPas encore d'évaluation
- Instructions pour pied SeniorDocument52 pagesInstructions pour pied SeniorPriyanka PatilPas encore d'évaluation
- AZAR Block CostcomparisonDocument8 pagesAZAR Block CostcomparisontckittuPas encore d'évaluation
- Wacker Neuson-Dpu - 25 KNDocument3 pagesWacker Neuson-Dpu - 25 KNMilutin BožovićPas encore d'évaluation
- Seminar ReportDocument30 pagesSeminar Reportshashank_gowda_7Pas encore d'évaluation
- Advantages & Disadvantages CITWDocument5 pagesAdvantages & Disadvantages CITWSreePrakashPas encore d'évaluation
- Testing Machines For TextilesDocument35 pagesTesting Machines For TextilesAmarech YigezuPas encore d'évaluation
- NPTEL Science and Technology of PolymersDocument2 pagesNPTEL Science and Technology of PolymersAzhagiri PonPas encore d'évaluation
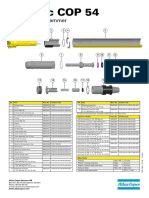
- 9853 1239 01 - COP 54 Service Poster - LOWDocument1 page9853 1239 01 - COP 54 Service Poster - LOWValourdos LukasPas encore d'évaluation
- Chapter 2 Cast IronDocument9 pagesChapter 2 Cast IronHelen AdugnaPas encore d'évaluation
- ESD Protection in CMOS: Characterization and Failure AnalysisDocument113 pagesESD Protection in CMOS: Characterization and Failure AnalysisElisavNirolfPas encore d'évaluation
- 2 Interference in Spur GearsDocument2 pages2 Interference in Spur Gearschris100% (1)
- Specifications: 3516C - SS Marine PropulsionDocument5 pagesSpecifications: 3516C - SS Marine PropulsionAidel MustafaPas encore d'évaluation
- Stationary Concrete Pumps en G 16345-0 PDFDocument20 pagesStationary Concrete Pumps en G 16345-0 PDFLUIS ISAAC LEON PAROPas encore d'évaluation
- Assignment - Iv Examples of Design of Transformer: W 2 M 2 T W WDocument1 pageAssignment - Iv Examples of Design of Transformer: W 2 M 2 T W Wiamketul6340Pas encore d'évaluation
- Guess Questions of Aramco Written Examination For Hse Supervisor / Engineer / OfficerDocument31 pagesGuess Questions of Aramco Written Examination For Hse Supervisor / Engineer / OfficerAlam Shamsher0% (1)
- NTP35N15 Power MOSFET Features and SpecificationsDocument7 pagesNTP35N15 Power MOSFET Features and SpecificationsChristine GomezPas encore d'évaluation
- Motores SumergiblesDocument68 pagesMotores SumergiblescyberespiaPas encore d'évaluation
- Variable Geometry Turbine Technology For Marine Gas Turbines-Springer (2022)Document227 pagesVariable Geometry Turbine Technology For Marine Gas Turbines-Springer (2022)miladPas encore d'évaluation
- A320 Aircraft CharacteristicsDocument387 pagesA320 Aircraft CharacteristicsEder LucianoPas encore d'évaluation
- Interaction & Bank EffectDocument6 pagesInteraction & Bank EffectAkash KandwalPas encore d'évaluation
- Estimating/ Construction Planning/ Scheduling and Programming/ Feasibility Project StudiesDocument4 pagesEstimating/ Construction Planning/ Scheduling and Programming/ Feasibility Project StudiesVholts Villa VitugPas encore d'évaluation
- UI Sample ResumeDocument6 pagesUI Sample ResumenazeerPas encore d'évaluation