Vous aimerez peut-être aussi
- Philippine Multimodal Transportation and Logistics Industry Roadmap - Key Recommendations - 2016.04.14Document89 pagesPhilippine Multimodal Transportation and Logistics Industry Roadmap - Key Recommendations - 2016.04.14PortCalls50% (4)
- 2008 Reverse Logistics Strategies For End-Of-life ProductsDocument22 pages2008 Reverse Logistics Strategies For End-Of-life ProductsValen Ramirez HPas encore d'évaluation
- Partnership Law (Chapter 1 and 2) - ReviewerDocument9 pagesPartnership Law (Chapter 1 and 2) - ReviewerJeanne Marie0% (1)
- Simulation of Bi-Direction Pedestrian Movement in CorridorDocument10 pagesSimulation of Bi-Direction Pedestrian Movement in CorridorKhairulPas encore d'évaluation
- Physica A: Ren-Yong Guo, S.C. Wong, Hai-Jun Huang, Peng Zhang, William H.K. LamDocument12 pagesPhysica A: Ren-Yong Guo, S.C. Wong, Hai-Jun Huang, Peng Zhang, William H.K. LamKhairulPas encore d'évaluation
- An Improved Cellular Automaton Model For Urban Walkway Bi-Directional Pedestrian FlowDocument4 pagesAn Improved Cellular Automaton Model For Urban Walkway Bi-Directional Pedestrian FlowKhairulPas encore d'évaluation
- Transportation Research Part B: Ren-Yong Guo, Hai-Jun Huang, S.C. WongDocument17 pagesTransportation Research Part B: Ren-Yong Guo, Hai-Jun Huang, S.C. WongKhairulPas encore d'évaluation
- Simulation of Evacuation Process in A Supermarket With Cellular AutomataDocument6 pagesSimulation of Evacuation Process in A Supermarket With Cellular AutomataMusliminPas encore d'évaluation
- Human Gait Modeling: Dealing With Holonomic Constraints: Tingshu Hu Zongli Lin Mark F. Abel Paul E. AllaireDocument6 pagesHuman Gait Modeling: Dealing With Holonomic Constraints: Tingshu Hu Zongli Lin Mark F. Abel Paul E. AllairehkhkPas encore d'évaluation
- A Behavior-Based Model For Pedestrian Counter Ow: W.G. Weng, S.F. Shen, H.Y. Yuan, W.C. FanDocument11 pagesA Behavior-Based Model For Pedestrian Counter Ow: W.G. Weng, S.F. Shen, H.Y. Yuan, W.C. FanKhairulPas encore d'évaluation
- Physics Letters A: Takashi NagataniDocument4 pagesPhysics Letters A: Takashi NagataniKhairulPas encore d'évaluation
- Jay Newby and Paul C Bressloff - Random Intermittent Search and The Tug-Of-War Model of Motor-Driven TransportDocument28 pagesJay Newby and Paul C Bressloff - Random Intermittent Search and The Tug-Of-War Model of Motor-Driven TransportNeerFamPas encore d'évaluation
- Double Pendulum: AnalysisDocument5 pagesDouble Pendulum: AnalysisEji Marie MakamaksPas encore d'évaluation
- Robust Soldier Crab Ball Gate: Department of Earth and Planetary Sciences Kobe University Kobe 657-8501, JapanDocument12 pagesRobust Soldier Crab Ball Gate: Department of Earth and Planetary Sciences Kobe University Kobe 657-8501, Japanzmei23Pas encore d'évaluation
- tmpADF7 TMPDocument10 pagestmpADF7 TMPFrontiersPas encore d'évaluation
- Ant Colony Optimization For Routing and Load-Balancing: Survey and New DirectionsDocument13 pagesAnt Colony Optimization For Routing and Load-Balancing: Survey and New Directionsramanji2009Pas encore d'évaluation
- Parameter Study of Stable Walking Gaits For Nao Humanoid RobotDocument9 pagesParameter Study of Stable Walking Gaits For Nao Humanoid Robotbianca nobeliaPas encore d'évaluation
- Chebbi 16559Document28 pagesChebbi 16559acarrascotaberaPas encore d'évaluation
- Modeling Self-Organizing Traffic Lights With Elementary Cellular AutomataDocument33 pagesModeling Self-Organizing Traffic Lights With Elementary Cellular AutomatateojhPas encore d'évaluation
- Particle Swarm OptimizationDocument22 pagesParticle Swarm OptimizationOmar MontufarPas encore d'évaluation
- Particle Swarm Optimization Algorithm-An OverviewDocument22 pagesParticle Swarm Optimization Algorithm-An Overviewamreen786Pas encore d'évaluation
- Modified Artificial Potential Fields Algorithm For Mobile Robot Path PlanningDocument4 pagesModified Artificial Potential Fields Algorithm For Mobile Robot Path PlanningiaetsdiaetsdPas encore d'évaluation
- Simulation of The Active Brownian Motion of A Microswimmer: 130.64.11.153 On: Fri, 26 Sep 2014 17:23:40Document7 pagesSimulation of The Active Brownian Motion of A Microswimmer: 130.64.11.153 On: Fri, 26 Sep 2014 17:23:40debdip1993Pas encore d'évaluation
- Controlled Locomotion of A Droplet Propelled by An Encapsulated SquirmerDocument9 pagesControlled Locomotion of A Droplet Propelled by An Encapsulated SquirmerArindam BasakPas encore d'évaluation
- Mechanism and Machine Theory: Bin Li, Yangmin Li, Xinhua ZhaoDocument12 pagesMechanism and Machine Theory: Bin Li, Yangmin Li, Xinhua ZhaoArmando MalonePas encore d'évaluation
- Liquid State MachineDocument5 pagesLiquid State MachineTommy Anastas TaskovskiPas encore d'évaluation
- Simulating Crowd Movements Using Fine Grid Cellular AutomataDocument6 pagesSimulating Crowd Movements Using Fine Grid Cellular AutomataKhairulPas encore d'évaluation
- Robotics Autonomous Systems: Karsten Berns A, Riidiger Dillmann B,,, Stefan Piekenbrock HDocument12 pagesRobotics Autonomous Systems: Karsten Berns A, Riidiger Dillmann B,,, Stefan Piekenbrock HPraveen KumarPas encore d'évaluation
- A More Realistic Simulation of Pedestrian Based On Cellular AutomataDocument6 pagesA More Realistic Simulation of Pedestrian Based On Cellular AutomataKhairulPas encore d'évaluation
- Open Loop and Close Loop System 1Document11 pagesOpen Loop and Close Loop System 1Bhuban LimbuPas encore d'évaluation
- Characterization of Ankle Function During Stair Ambulation: D.H. Gates, J. Lelas, U. Della Croce, H. Herr, P. BonatoDocument4 pagesCharacterization of Ankle Function During Stair Ambulation: D.H. Gates, J. Lelas, U. Della Croce, H. Herr, P. BonatoIbrahim ImamPas encore d'évaluation
- Anomalous Diffusion in Silo Drainage: T E P J EDocument8 pagesAnomalous Diffusion in Silo Drainage: T E P J EA94leo14hsetmaPas encore d'évaluation
- Bipedal Locomotion, Robot Gymnastics, and and Robot Air Hockey: A RapprochementDocument8 pagesBipedal Locomotion, Robot Gymnastics, and and Robot Air Hockey: A RapprochementIoan DorofteiPas encore d'évaluation
- Science 2Document13 pagesScience 2Sam StuartPas encore d'évaluation
- Low Dimensional Description of Pedestrian-Induced Oscillation of The Millennium BridgeDocument18 pagesLow Dimensional Description of Pedestrian-Induced Oscillation of The Millennium Bridgebursuc2Pas encore d'évaluation
- AI in The Game DevelopmentDocument5 pagesAI in The Game DevelopmentInternational Journal of Engineering Inventions (IJEI)Pas encore d'évaluation
- Green's Functions For Analysis of Dynamic Response of Wheel/rail To Vertical ExcitationDocument28 pagesGreen's Functions For Analysis of Dynamic Response of Wheel/rail To Vertical ExcitationCalina OpreaPas encore d'évaluation
- LM 2017 Salamander FinalDocument7 pagesLM 2017 Salamander Finaldigoldman123Pas encore d'évaluation
- Boyer 2016Document34 pagesBoyer 2016ttttPas encore d'évaluation
- Three-Dimensional Scour Simulations With A Two-Phase Flow ModelDocument39 pagesThree-Dimensional Scour Simulations With A Two-Phase Flow Modeldave kisaluPas encore d'évaluation
- Gait & PostureDocument7 pagesGait & Posturekiranjot singhPas encore d'évaluation
- Vmax.: Soft Adaptive Particle Swarm Algorithm For Large Scale OptimizationDocument5 pagesVmax.: Soft Adaptive Particle Swarm Algorithm For Large Scale OptimizationIndira SivakumarPas encore d'évaluation
- Error Bounds For The Method of Steepest Descents (W.G.C Boyd)Document27 pagesError Bounds For The Method of Steepest Descents (W.G.C Boyd)Jason UchennnaPas encore d'évaluation
- Fmah EfeeaDocument7 pagesFmah EfeeaVadim KhaymsPas encore d'évaluation
- A Non-Standard Statistical Approach To The Silo Discharge: T E P JDocument8 pagesA Non-Standard Statistical Approach To The Silo Discharge: T E P JA94leo14hsetmaPas encore d'évaluation
- Double PendulumDocument5 pagesDouble PendulumRazvan PricopPas encore d'évaluation
- Computers in Biology and Medicine: B. Nayebifar, H. Abrishami MoghaddamDocument8 pagesComputers in Biology and Medicine: B. Nayebifar, H. Abrishami MoghaddamMohammad RofiiPas encore d'évaluation
- Ant Colony Search Algorithm For Optimal Reactive Power OptimizationDocument12 pagesAnt Colony Search Algorithm For Optimal Reactive Power OptimizationMed Cherif BellaouerPas encore d'évaluation
- A.M. Engelbrecht, B. Bredenkamp and C. Aldrich - Simulation of Fouling in Membrane Processes With Cellular AutomataDocument5 pagesA.M. Engelbrecht, B. Bredenkamp and C. Aldrich - Simulation of Fouling in Membrane Processes With Cellular AutomataIrokkPas encore d'évaluation
- A Numerical 2D Simulation of Part Motion in Vibratory Bowl Feeders by Discrete Element MethodDocument12 pagesA Numerical 2D Simulation of Part Motion in Vibratory Bowl Feeders by Discrete Element Methodbuithang31122001Pas encore d'évaluation
- The Locomotion of The Cockroach Periplaneta AmericanaDocument10 pagesThe Locomotion of The Cockroach Periplaneta AmericanaNissa MarlindaPas encore d'évaluation
- Trajectory ClusteringDocument58 pagesTrajectory ClusteringPetrick Gonzalez PerezPas encore d'évaluation
- 1991 Control Aspects of Active Above-Knee Prosthesis Popovic1991Document17 pages1991 Control Aspects of Active Above-Knee Prosthesis Popovic1991Dawit AssfawPas encore d'évaluation
- The WARP Code: Modeling High Intensity Ion Beams: D. P. Grote, A. Friedman, J. L. Vay, I. HaberDocument6 pagesThe WARP Code: Modeling High Intensity Ion Beams: D. P. Grote, A. Friedman, J. L. Vay, I. HaberquezzePas encore d'évaluation
- Triple LinkageDocument13 pagesTriple Linkagepalerm00Pas encore d'évaluation
- Learning Basic Navigation For Personal Satellite Assistant Using NeuroevolutionDocument8 pagesLearning Basic Navigation For Personal Satellite Assistant Using NeuroevolutionWaldemarVillamayor-VenialboPas encore d'évaluation
- Inference in Particle Tracking Experiments by Passing Messages Between ImagesDocument6 pagesInference in Particle Tracking Experiments by Passing Messages Between ImagesLiquan PeiPas encore d'évaluation
- NSTV 2008 DCDS BDocument30 pagesNSTV 2008 DCDS BAlexei VasilievPas encore d'évaluation
- A 2D Random Walk Mobility Model For Location Management Studies in Wireless NetworksDocument14 pagesA 2D Random Walk Mobility Model For Location Management Studies in Wireless NetworksMustafiz1@Pas encore d'évaluation
- Comparison of k ε and RNG k ε Turbulent Models for Estimation of Velocity Profiles along the Hydraulic Jump on Corrugated BeDocument6 pagesComparison of k ε and RNG k ε Turbulent Models for Estimation of Velocity Profiles along the Hydraulic Jump on Corrugated BeAhsan LatifPas encore d'évaluation
- Analysis of The Haulage Ropes On Ropeways in Case of Accidental LoadsDocument4 pagesAnalysis of The Haulage Ropes On Ropeways in Case of Accidental LoadsarumugamPas encore d'évaluation
- Genetic Optimization Techniques for Sizing and Management of Modern Power SystemsD'EverandGenetic Optimization Techniques for Sizing and Management of Modern Power SystemsPas encore d'évaluation
- Week 6Document23 pagesWeek 6KhairulPas encore d'évaluation
- 3.2.3 Newton's Divided Difference Interpolation: Lagrange Method Has The Following WeaknessesDocument31 pages3.2.3 Newton's Divided Difference Interpolation: Lagrange Method Has The Following WeaknessesKhairulPas encore d'évaluation
- Week 4Document8 pagesWeek 4KhairulPas encore d'évaluation
- 3.4 Numerical Solution of Differential EquationsDocument21 pages3.4 Numerical Solution of Differential EquationsKhairulPas encore d'évaluation
- Tradable News ReportsDocument10 pagesTradable News ReportsKhairulPas encore d'évaluation
- Assessment Methods: Vincent Pang Universiti Malaysia SabahDocument10 pagesAssessment Methods: Vincent Pang Universiti Malaysia SabahKhairulPas encore d'évaluation
- 4 Construction of Subjective ItemsDocument15 pages4 Construction of Subjective ItemsKhairul100% (1)
- 2 Bloom's Taxonomy and Test BlueprintDocument25 pages2 Bloom's Taxonomy and Test BlueprintKhairul100% (3)
- Computer Simulations To Maximise Fuel Efficiency and Work Performance of Agricultural Tractors in Rotovating and Ploughing OperationsDocument11 pagesComputer Simulations To Maximise Fuel Efficiency and Work Performance of Agricultural Tractors in Rotovating and Ploughing OperationsKhairulPas encore d'évaluation
- Scripta Materialia: S.V. Starikov, L.N. KolotovaDocument4 pagesScripta Materialia: S.V. Starikov, L.N. KolotovaKhairulPas encore d'évaluation
- Nuclear Instruments and Methods in Physics Research A: Irène BuvatDocument7 pagesNuclear Instruments and Methods in Physics Research A: Irène BuvatKhairulPas encore d'évaluation
- Research Priorities in Surgical Simulation For The 21st CenturyDocument5 pagesResearch Priorities in Surgical Simulation For The 21st CenturyKhairulPas encore d'évaluation
- BSNL Project MBA NitishDocument92 pagesBSNL Project MBA NitishAnkitSingh0% (2)
- Print Design Business Model CanvasDocument3 pagesPrint Design Business Model CanvasMusic Da LifePas encore d'évaluation
- Taxation Philippine Tax and Income System Assignments and QuizdocxDocument20 pagesTaxation Philippine Tax and Income System Assignments and QuizdocxMicaella ShaynePas encore d'évaluation
- Tesco 750 ESIDocument2 pagesTesco 750 ESIjlmunozvPas encore d'évaluation
- 1.1 Cruz v. DENR PDFDocument7 pages1.1 Cruz v. DENR PDFBenBulacPas encore d'évaluation
- Shell Omala s2 GX 320 TdsDocument2 pagesShell Omala s2 GX 320 TdsOnie Hammamz OylPas encore d'évaluation
- Baterías YuasaDocument122 pagesBaterías YuasaLuisPas encore d'évaluation
- Soal TKM B. Inggris Kls XII Des. 2013Document8 pagesSoal TKM B. Inggris Kls XII Des. 2013Sinta SilviaPas encore d'évaluation
- OPERATING MANUAL Micro Powder MillDocument51 pagesOPERATING MANUAL Micro Powder MillSher AhmadPas encore d'évaluation
- TP913Document5 pagesTP913jmpateiro1985Pas encore d'évaluation
- List of Newly and Migrated Programs For September 2022 - WebsiteDocument21 pagesList of Newly and Migrated Programs For September 2022 - WebsiteRMG REPAIRPas encore d'évaluation
- Qrqs"1 Xl/Ijj1L Joi?Llt'Lll: Transport Bhawan, 1, Parliament Street New Delhi-110001Document2 pagesQrqs"1 Xl/Ijj1L Joi?Llt'Lll: Transport Bhawan, 1, Parliament Street New Delhi-110001PrakashKommukuriPas encore d'évaluation
- Hydraulic Breakers in Mining ApplicationDocument28 pagesHydraulic Breakers in Mining ApplicationdrmassterPas encore d'évaluation
- Lae ReservingDocument5 pagesLae ReservingEsra Gunes YildizPas encore d'évaluation
- 4439 Chap01Document28 pages4439 Chap01bouthaina otPas encore d'évaluation
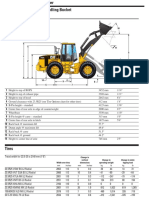
- Cat It62hDocument4 pagesCat It62hMarceloPas encore d'évaluation
- Deploying MVC5 Based Provider Hosted Apps For On-Premise SharePoint 2013Document22 pagesDeploying MVC5 Based Provider Hosted Apps For On-Premise SharePoint 2013cilango1Pas encore d'évaluation
- Literature Review 2500 WordsDocument6 pagesLiterature Review 2500 Wordsvvjrpsbnd100% (1)
- FranchisingDocument38 pagesFranchisingprasadmahajan26100% (1)
- CH7Document34 pagesCH7Abdul AzizPas encore d'évaluation
- MTBE - Module - 3Document83 pagesMTBE - Module - 3ABHIJITH V SPas encore d'évaluation
- Blockchain Unit Wise Question BankDocument3 pagesBlockchain Unit Wise Question BankMeghana50% (4)
- In Coming MailDocument4 pagesIn Coming Mailpoetoet100% (1)
- წყალტუბოს - სპა კურორტის განვითარების გეგმაDocument16 pagesწყალტუბოს - სპა კურორტის განვითარების გეგმაReginfoPas encore d'évaluation
- Job Description Examples - British GasDocument2 pagesJob Description Examples - British GasIonela IftimePas encore d'évaluation
- Beenet Conf ScriptDocument4 pagesBeenet Conf ScriptRavali KambojiPas encore d'évaluation
- User Exits in Validations SubstitutionsDocument3 pagesUser Exits in Validations SubstitutionssandeepPas encore d'évaluation