Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Plans PDFDocument49 pagesPlans PDFEstevam Gomes de Azevedo85% (34)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Grade - 2 Subject - Mathematics Unit - Geometry Topic - Geometrical Shapes School - Army School Roorkee Prepared by Mrs. RanjanaDocument25 pagesGrade - 2 Subject - Mathematics Unit - Geometry Topic - Geometrical Shapes School - Army School Roorkee Prepared by Mrs. RanjanaPenke Mejado BelenPas encore d'évaluation
- Keiilf: Training ManualDocument53 pagesKeiilf: Training ManualGary GouveiaPas encore d'évaluation
- Combined Shear and TensionDocument16 pagesCombined Shear and TensionDAN MARK OPONDAPas encore d'évaluation
- Shandong Baoshida Cable Co, LTD.: Technical ParameterDocument3 pagesShandong Baoshida Cable Co, LTD.: Technical ParameterkmiqdPas encore d'évaluation
- Goliath 90 v129 eDocument129 pagesGoliath 90 v129 eerkanPas encore d'évaluation
- LET General Math ReviewerDocument7 pagesLET General Math ReviewerMarco Rhonel Eusebio100% (1)
- Semi Finals in Tle 2015Document3 pagesSemi Finals in Tle 2015LoraineTenorioPas encore d'évaluation
- Douluo Dalu Volume 05 - Star Dou Forest PDFDocument141 pagesDouluo Dalu Volume 05 - Star Dou Forest PDFRay Joseph LealPas encore d'évaluation
- DOC-20161226-WA0009 DiagramaDocument61 pagesDOC-20161226-WA0009 DiagramaPedroPas encore d'évaluation
- Eng DS Epp-2314 1410Document2 pagesEng DS Epp-2314 1410MarkusAldoMaquPas encore d'évaluation
- Cobalamin in Companion AnimalsDocument8 pagesCobalamin in Companion AnimalsFlávia UchôaPas encore d'évaluation
- Drilling & GroutingDocument18 pagesDrilling & GroutingSantosh Laxman PatilPas encore d'évaluation
- Irina Maleeva - Ariel Snowflake x6 - ENG - FreeDocument4 pagesIrina Maleeva - Ariel Snowflake x6 - ENG - FreeMarinaKorzinaPas encore d'évaluation
- NF en Iso 5167-6-2019Document22 pagesNF en Iso 5167-6-2019Rem FgtPas encore d'évaluation
- Save Water SpeechDocument4 pagesSave Water SpeechHari Prakash Shukla0% (1)
- 12.5 Collision Theory - ChemistryDocument15 pages12.5 Collision Theory - ChemistryAri CleciusPas encore d'évaluation
- Effects of Climate ChangeDocument3 pagesEffects of Climate Changejiofjij100% (1)
- Port Name: Port of BaltimoreDocument17 pagesPort Name: Port of Baltimoremohd1khairul1anuarPas encore d'évaluation
- TM-8000 HD Manual PDFDocument37 pagesTM-8000 HD Manual PDFRoxana BirtumPas encore d'évaluation
- Manual Wire Rope Winches Wall-Mounted Wire Rope Winch SW-W: Equipment and ProcessingDocument1 pageManual Wire Rope Winches Wall-Mounted Wire Rope Winch SW-W: Equipment and Processingdrg gocPas encore d'évaluation
- SCM (Subway Project Report)Document13 pagesSCM (Subway Project Report)Beast aPas encore d'évaluation
- Stepan Formulation 926Document2 pagesStepan Formulation 926Moaz SiddigPas encore d'évaluation
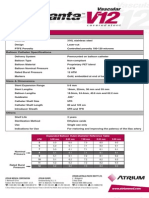
- Advanta V12 Data SheetDocument2 pagesAdvanta V12 Data SheetJuliana MiyagiPas encore d'évaluation
- Anxiety Disorders - Causes, Types, Symptoms, & TreatmentsDocument5 pagesAnxiety Disorders - Causes, Types, Symptoms, & Treatmentsrehaan662Pas encore d'évaluation
- Ensemble Averaging (Machine Learning)Document3 pagesEnsemble Averaging (Machine Learning)emma698Pas encore d'évaluation
- Fines Reduction Project at Wendling Bowser QuarryDocument2 pagesFines Reduction Project at Wendling Bowser QuarryMarcos Antonio ParoliniPas encore d'évaluation
- Nissan Copper LTDDocument11 pagesNissan Copper LTDankit_shahPas encore d'évaluation
- Impact of Retrofitting Existing Combined Heat and Power Plant With Polygeneration of Biomethane PDFDocument16 pagesImpact of Retrofitting Existing Combined Heat and Power Plant With Polygeneration of Biomethane PDFAwais Salman0% (1)
- Material Specification - 077154C-000-JSS-1700-009 - DDocument13 pagesMaterial Specification - 077154C-000-JSS-1700-009 - DStructures ProductionPas encore d'évaluation