Vous aimerez peut-être aussi
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Insights Feb 2010 STDDocument8 pagesInsights Feb 2010 STDEmilio LuquetPas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Analog System Lab Pro Manual v103Document104 pagesAnalog System Lab Pro Manual v103Giuseppe LulloPas encore d'évaluation
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Clinical Issues in Central Auditory Processing Disorders: LshssDocument6 pagesClinical Issues in Central Auditory Processing Disorders: LshssEmilio LuquetPas encore d'évaluation
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Raspberry Pi Wireless Networks-Electronicajc-2 PDFDocument138 pagesRaspberry Pi Wireless Networks-Electronicajc-2 PDFEmilio LuquetPas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Articulation and Intelligibility, Allen2005Document136 pagesArticulation and Intelligibility, Allen2005Emilio LuquetPas encore d'évaluation
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- 10 3109@14992027 2011 553204Document12 pages10 3109@14992027 2011 553204Emilio LuquetPas encore d'évaluation
- 257 261Document5 pages257 261Emilio LuquetPas encore d'évaluation
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- 10 3109@14992027 2011 553204Document12 pages10 3109@14992027 2011 553204Emilio LuquetPas encore d'évaluation
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- 10 1121@1 3621502Document14 pages10 1121@1 3621502Emilio LuquetPas encore d'évaluation
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- The Use of Cortical Auditory Evoked Potentials To Evaluate Neural Encoding If Speech Sounds in AdultsDocument14 pagesThe Use of Cortical Auditory Evoked Potentials To Evaluate Neural Encoding If Speech Sounds in AdultsEmilio LuquetPas encore d'évaluation
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Rosenblum 1978Document12 pagesRosenblum 1978Emilio LuquetPas encore d'évaluation
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- 10 1121@1 3621502Document14 pages10 1121@1 3621502Emilio LuquetPas encore d'évaluation
- Clinical Issues in Central Auditory Processing Disorders: LshssDocument6 pagesClinical Issues in Central Auditory Processing Disorders: LshssEmilio LuquetPas encore d'évaluation
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Ad 229 e LeafletDocument4 pagesAd 229 e LeafletEmilio LuquetPas encore d'évaluation
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Interacoustics AD229e Service Manual Complete PDFDocument65 pagesInteracoustics AD229e Service Manual Complete PDFEmilio Luquet100% (1)
- MuscleDocument5 pagesMuscleEmilio LuquetPas encore d'évaluation
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The Use of Cortical Auditory Evoked Potentials To Evaluate Neural Encoding If Speech Sounds in AdultsDocument14 pagesThe Use of Cortical Auditory Evoked Potentials To Evaluate Neural Encoding If Speech Sounds in AdultsEmilio LuquetPas encore d'évaluation
- MisophoniaDocument10 pagesMisophoniaEmilio LuquetPas encore d'évaluation
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Interacoustics AD229 Manual-1 PDFDocument65 pagesInteracoustics AD229 Manual-1 PDFEmilio LuquetPas encore d'évaluation
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- MisophoniaDocument10 pagesMisophoniaEmilio LuquetPas encore d'évaluation
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- Chapter 1Document15 pagesChapter 1Emilio LuquetPas encore d'évaluation
- Loudspeakers On Damped Pipes (G. L. Augspurger)Document13 pagesLoudspeakers On Damped Pipes (G. L. Augspurger)EwanColsell100% (1)
- The Ribbon GuyDocument5 pagesThe Ribbon GuyEmilio LuquetPas encore d'évaluation
- Manual Mantenimiento CheryDocument281 pagesManual Mantenimiento CheryEmilio LuquetPas encore d'évaluation
- Feature Writing EnglishDocument2 pagesFeature Writing EnglishAldren BababooeyPas encore d'évaluation
- Lecture 20Document10 pagesLecture 20bilal5202050Pas encore d'évaluation
- 2014 An125hkl4Document69 pages2014 An125hkl4El Turco ChalabePas encore d'évaluation
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (120)
- Age ProblemDocument31 pagesAge ProblemKenny CantilaPas encore d'évaluation
- Brock Planetary Declination SDocument6 pagesBrock Planetary Declination SDositheus Seth100% (2)
- 1 Quarter: 5 Grade Benchmark Scope and Sequence Pacing Guide 2015-2016Document3 pages1 Quarter: 5 Grade Benchmark Scope and Sequence Pacing Guide 2015-2016api-292307509Pas encore d'évaluation
- Mobile Communication Networks: Exercices 4Document2 pagesMobile Communication Networks: Exercices 4Shirley RodriguesPas encore d'évaluation
- Metageographies of Coastal Management: Negotiating Spaces of Nature and Culture at The Wadden SeaDocument8 pagesMetageographies of Coastal Management: Negotiating Spaces of Nature and Culture at The Wadden Seadwi kurniawatiPas encore d'évaluation
- PalmistryDocument116 pagesPalmistrymarinoyogaPas encore d'évaluation
- EXP1POSTLABDocument13 pagesEXP1POSTLABGiane MagimotPas encore d'évaluation
- 14 WosDocument6 pages14 WosATUL KURZEKARPas encore d'évaluation
- Chemistry NotesDocument11 pagesChemistry Notesraifaisal9267% (12)
- Tutorial 2Document2 pagesTutorial 2Adam HakimiPas encore d'évaluation
- FPAL Product Code GuideDocument53 pagesFPAL Product Code GuideSRARPas encore d'évaluation
- Leaflet CycleManager Ep CycleManager ErDocument7 pagesLeaflet CycleManager Ep CycleManager ErValeska ArdilesPas encore d'évaluation
- Welding Research Council: BulletinDocument28 pagesWelding Research Council: BulletinRogerio Tropia GranjaPas encore d'évaluation
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Rubber Lined Piping - A Solution To Corrosion ResistanceDocument5 pagesRubber Lined Piping - A Solution To Corrosion ResistanceMohamed AghilaPas encore d'évaluation
- Laporan Pelayanan Rawat Jalan Tingkat Pertama (RJTP)Document10 pagesLaporan Pelayanan Rawat Jalan Tingkat Pertama (RJTP)dede komalasariPas encore d'évaluation
- Fantasy AGE - Spell SheetDocument2 pagesFantasy AGE - Spell SheetpacalypsePas encore d'évaluation
- Ac 521 007Document10 pagesAc 521 007JacquesPas encore d'évaluation
- Monthly Exam Part I Aurora English Course 1 (KD 1, KD2, PKD3)Document20 pagesMonthly Exam Part I Aurora English Course 1 (KD 1, KD2, PKD3)winda septiaraPas encore d'évaluation
- Epilepsy Lecture NoteDocument15 pagesEpilepsy Lecture Notetamuno7100% (2)
- An Experimental Investigation On Abrasive Jet Machining by Erosion Abrasive GrainDocument3 pagesAn Experimental Investigation On Abrasive Jet Machining by Erosion Abrasive GrainPkPas encore d'évaluation
- Daoyin Physical Calisthenics in The Internal Arts by Sifu Bob Robert Downey Lavericia CopelandDocument100 pagesDaoyin Physical Calisthenics in The Internal Arts by Sifu Bob Robert Downey Lavericia CopelandDragonfly HeilungPas encore d'évaluation
- Latihan Soal BlankDocument8 pagesLatihan Soal BlankDanbooPas encore d'évaluation
- From Science To God by Peter RussellDocument6 pagesFrom Science To God by Peter RussellFilho adulto pais alcolatrasPas encore d'évaluation
- Important Notice 38-2021 Dated 24-03-2021 Available Seats Foreign National Spon INI CET PG Courses July 2021Document3 pagesImportant Notice 38-2021 Dated 24-03-2021 Available Seats Foreign National Spon INI CET PG Courses July 2021Priyobrata KonjengbamPas encore d'évaluation
- Ketu in 12th HousesDocument10 pagesKetu in 12th HousesSanket MishraPas encore d'évaluation
- Sams Practical Transistor Theory 1964Document132 pagesSams Practical Transistor Theory 1964BillPas encore d'évaluation
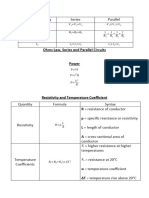
- EET - Formulas - Christmas TermDocument3 pagesEET - Formulas - Christmas TermJMDPas encore d'évaluation
- Alex & Me: How a Scientist and a Parrot Discovered a Hidden World of Animal Intelligence—and Formed a Deep Bond in the ProcessD'EverandAlex & Me: How a Scientist and a Parrot Discovered a Hidden World of Animal Intelligence—and Formed a Deep Bond in the ProcessPas encore d'évaluation
- Dark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseD'EverandDark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseÉvaluation : 3.5 sur 5 étoiles3.5/5 (69)
- Roxane Gay & Everand Originals: My Year of Psychedelics: Lessons on Better LivingD'EverandRoxane Gay & Everand Originals: My Year of Psychedelics: Lessons on Better LivingÉvaluation : 5 sur 5 étoiles5/5 (5)