Vous aimerez peut-être aussi
- nRF24L01P Product Specification 1 0Document78 pagesnRF24L01P Product Specification 1 0CaelumBlimpPas encore d'évaluation
- 10 1109@91 481843Document12 pages10 1109@91 481843debasishmee5808Pas encore d'évaluation
- Bhimbra-Generalized Theory Electrical MachinesDocument10 pagesBhimbra-Generalized Theory Electrical Machinesdebasishmee5808Pas encore d'évaluation
- RID 1 ModrobDocument6 pagesRID 1 Modrobdebasishmee5808Pas encore d'évaluation
- TrademarksDocument1 pageTrademarksDhyan SwaroopPas encore d'évaluation
- Control SystemDocument22 pagesControl SystemKamran RazaPas encore d'évaluation
- Adjunct 2Document5 pagesAdjunct 2debasishmee5808Pas encore d'évaluation
- Adaptive Control of Linearizable Systems: Fully-StateDocument9 pagesAdaptive Control of Linearizable Systems: Fully-Statedebasishmee5808Pas encore d'évaluation
- RID 1 ModrobDocument4 pagesRID 1 ModrobbalakaleesPas encore d'évaluation
- AssignmentsDocument11 pagesAssignmentsdebasishmee5808Pas encore d'évaluation
- Extramural Funding2012-13Document2 pagesExtramural Funding2012-13debasishmee5808Pas encore d'évaluation
- Electromagnetic Field TheoryDocument3 pagesElectromagnetic Field Theorydebasishmee5808Pas encore d'évaluation
- Lec 1Document18 pagesLec 1cavanzasPas encore d'évaluation
- AssignmentsDocument11 pagesAssignmentsdebasishmee5808Pas encore d'évaluation
- T Year B.tech Sylla1sbus Revised 18.08.10Document33 pagesT Year B.tech Sylla1sbus Revised 18.08.10Manoj KarmakarPas encore d'évaluation
- Sophus 3Document1 pageSophus 3debasishmee5808Pas encore d'évaluation
- Control System - I: Weekly Lesson PlanDocument5 pagesControl System - I: Weekly Lesson Plandebasishmee5808Pas encore d'évaluation
- Book ListDocument6 pagesBook Listdebasishmee58080% (1)
- Duplicate Doc Diploma CertiDocument1 pageDuplicate Doc Diploma Certidebasishmee5808Pas encore d'évaluation
- Lec 2Document25 pagesLec 2debasishmee5808Pas encore d'évaluation
- Introduction To Nba 16 NovDocument32 pagesIntroduction To Nba 16 Novdebasishmee5808Pas encore d'évaluation
- Lec 1Document18 pagesLec 1cavanzasPas encore d'évaluation
- 2 14 24Document11 pages2 14 24debasishmee5808Pas encore d'évaluation
- Best Practices of Report Writing Based On Study of Reports: Venue: India Habitat Centre, New DelhiDocument24 pagesBest Practices of Report Writing Based On Study of Reports: Venue: India Habitat Centre, New Delhidebasishmee5808Pas encore d'évaluation
- Graphical AbstractDocument2 pagesGraphical Abstractdebasishmee5808Pas encore d'évaluation
- Time ManagementDocument19 pagesTime ManagementShyam_Nair_9667Pas encore d'évaluation
- Lec 2Document25 pagesLec 2debasishmee5808Pas encore d'évaluation
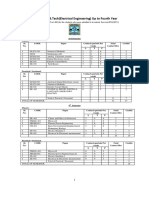
- Syllabus For B.Tech (Electrical Engineering) Up To Fourth YearDocument67 pagesSyllabus For B.Tech (Electrical Engineering) Up To Fourth YearDr. Kaushik MandalPas encore d'évaluation
- Comparison Between Integer Order and Fractional Order ControllersDocument6 pagesComparison Between Integer Order and Fractional Order Controllersdebasishmee5808Pas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5782)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (72)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Farming The Christian WayDocument35 pagesFarming The Christian WayJun StonePas encore d'évaluation
- Refernce 7Document13 pagesRefernce 7Ali ZubiediPas encore d'évaluation
- SWM Complete Notes PDFDocument96 pagesSWM Complete Notes PDFvara pulakhandamPas encore d'évaluation
- Notam For LGGGDocument42 pagesNotam For LGGGAPOSTOLOS KATSIONISPas encore d'évaluation
- Fs Technical StudyDocument8 pagesFs Technical StudyRenz Ian DeePas encore d'évaluation
- Zero Energy Green Home Office InterLED LightDocument1 pageZero Energy Green Home Office InterLED LightSsi OmarPas encore d'évaluation
- Experiment No: 2 - Determine Dynamics of First and Second Order SystemsDocument11 pagesExperiment No: 2 - Determine Dynamics of First and Second Order SystemsYAKALA RAVIKUMARPas encore d'évaluation
- Bill of Lading PDFDocument2 pagesBill of Lading PDFSushant Pai60% (5)
- Anti InfectiveDocument9 pagesAnti InfectiveMae DoctoleroPas encore d'évaluation
- DC-DC Boost Converter With Constant Output Voltage For Grid Connected Photovoltaic Application SystemDocument5 pagesDC-DC Boost Converter With Constant Output Voltage For Grid Connected Photovoltaic Application SystemMuhammad Adli RizqullohPas encore d'évaluation
- G.L.Bajaj Institute of Technology & Management Greater NoidaDocument3 pagesG.L.Bajaj Institute of Technology & Management Greater NoidaShubhanshu RanjanPas encore d'évaluation
- Vegetarian LivingDocument100 pagesVegetarian Livingrayone9Pas encore d'évaluation
- List VERODocument16 pagesList VEROfahrizalPas encore d'évaluation
- Swimming Pool Design Rev-0Document2 pagesSwimming Pool Design Rev-0Haytham Samir75% (4)
- Manuskrip Jurnal IndahDocument6 pagesManuskrip Jurnal IndahindahPas encore d'évaluation
- LM317M 3-Terminal Adjustable Regulator: 1 Features 3 DescriptionDocument23 pagesLM317M 3-Terminal Adjustable Regulator: 1 Features 3 DescriptionShubham RajPas encore d'évaluation
- Matlab Arduino PDFDocument20 pagesMatlab Arduino PDFmekanicobucaroPas encore d'évaluation
- How To Increase Flow In Lamy Fountain PensDocument21 pagesHow To Increase Flow In Lamy Fountain PensPHILL.MARTIN3356Pas encore d'évaluation
- Trent 700 - tcm92-5733Document4 pagesTrent 700 - tcm92-5733arabysadekPas encore d'évaluation
- Descriptive Text Purpose:: ( (: The Use of Adjectives and Compound AdjectivesDocument3 pagesDescriptive Text Purpose:: ( (: The Use of Adjectives and Compound AdjectivesEka Nur Laela Mar'atus SholikhaPas encore d'évaluation
- PS 7 - Material Balance With Chemical Reactions For Multiple UnitsDocument1 pagePS 7 - Material Balance With Chemical Reactions For Multiple UnitsBernie SuarezPas encore d'évaluation
- Ultra PhysicsDocument30 pagesUltra PhysicsnidharshanPas encore d'évaluation
- U.K. Shakyawar - ERDMPDocument32 pagesU.K. Shakyawar - ERDMPPanchdev KumarPas encore d'évaluation
- How To Make A Simple DC MotorDocument1 pageHow To Make A Simple DC MotorQuen AñanaPas encore d'évaluation
- MSDS N Acetyl D GlucosamineDocument4 pagesMSDS N Acetyl D GlucosamineEdi SuryadiPas encore d'évaluation
- Activity1 Group6Document4 pagesActivity1 Group6Castor, Cyril Nova T.Pas encore d'évaluation
- 05 Olen 2023 Subiect X Sectiunea ADocument4 pages05 Olen 2023 Subiect X Sectiunea AcosminaPas encore d'évaluation
- Lexical Expressive Means and Stylistic DevicesDocument27 pagesLexical Expressive Means and Stylistic DevicesTania ShramPas encore d'évaluation
- Notes On Cargo Work by Capt. Kyaw Mya OoDocument333 pagesNotes On Cargo Work by Capt. Kyaw Mya OoKyaw Mya Oo100% (1)
- My ScramjetDocument13 pagesMy ScramjetHimanshu GuptaPas encore d'évaluation