Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- 10 1 1 41 1193Document10 pages10 1 1 41 1193Daniel SileshiPas encore d'évaluation
- Methods of Linear Control TheoryDocument20 pagesMethods of Linear Control TheoryFawaz PartoPas encore d'évaluation
- Full Paper Mathematical Modelling Simulation and Experimental VerificationDocument12 pagesFull Paper Mathematical Modelling Simulation and Experimental VerificationFawaz PartoPas encore d'évaluation
- Modeling and Control of A Rotary Inverted Pendulum Using Various Methods, Comparative Assessment and Result AnalysisDocument7 pagesModeling and Control of A Rotary Inverted Pendulum Using Various Methods, Comparative Assessment and Result AnalysisFawaz PartoPas encore d'évaluation
- Mathematical Model of The Double Effect Telescopic Hydraulic DamperDocument4 pagesMathematical Model of The Double Effect Telescopic Hydraulic DamperFawaz PartoPas encore d'évaluation
- IEEE ConferenceDocument7 pagesIEEE ConferenceFawaz PartoPas encore d'évaluation
- Lecture 37PNEUMATICS ACTUATORSDocument43 pagesLecture 37PNEUMATICS ACTUATORSpratapy234Pas encore d'évaluation
- Design and Finite Element Analysis of Double - Acting, Double - Ends Hydraulic Cylinder For Industrial Automation ApplicationDocument8 pagesDesign and Finite Element Analysis of Double - Acting, Double - Ends Hydraulic Cylinder For Industrial Automation ApplicationAJER JOURNALPas encore d'évaluation
- Positioning System of A Pneumatic Actuator Driven by Proportional Pressure Regulator ValvesDocument6 pagesPositioning System of A Pneumatic Actuator Driven by Proportional Pressure Regulator ValvesFawaz PartoPas encore d'évaluation
- Lec10 ControlDocument33 pagesLec10 Controlammar120Pas encore d'évaluation
- Lecture 5: Model-Free Control: David SilverDocument43 pagesLecture 5: Model-Free Control: David SilverFawaz PartoPas encore d'évaluation
- 4Document9 pages4Fawaz PartoPas encore d'évaluation
- 10 1 1 24 4443 PDFDocument27 pages10 1 1 24 4443 PDFFawaz PartoPas encore d'évaluation
- Nonlinear Control of An Inverted PendulumDocument108 pagesNonlinear Control of An Inverted PendulumFawaz PartoPas encore d'évaluation
- CND 013 08 081006 PDFDocument7 pagesCND 013 08 081006 PDFFawaz PartoPas encore d'évaluation
- ControlDocument47 pagesControlFawaz PartoPas encore d'évaluation
- Xuetal Chapterrev4Document28 pagesXuetal Chapterrev4Fawaz PartoPas encore d'évaluation
- ECE311S Dynamic Systems & Control: Course Notes by Bruce Francis January 2010Document116 pagesECE311S Dynamic Systems & Control: Course Notes by Bruce Francis January 2010Karam AlmasriPas encore d'évaluation
- NASA From Ping Lu Paper PDFDocument41 pagesNASA From Ping Lu Paper PDFFawaz PartoPas encore d'évaluation
- Eeee PDFDocument4 pagesEeee PDFFawaz PartoPas encore d'évaluation
- 0306419016669037Document12 pages0306419016669037Fawaz PartoPas encore d'évaluation
- Aircraft Landing With Decelerated Approach (Longitudinal Movement Model)Document6 pagesAircraft Landing With Decelerated Approach (Longitudinal Movement Model)Fawaz PartoPas encore d'évaluation
- Coupled Spring PDFDocument16 pagesCoupled Spring PDFa_oucharPas encore d'évaluation
- Eeee PDFDocument4 pagesEeee PDFFawaz PartoPas encore d'évaluation
- Islamic FestivalsDocument14 pagesIslamic FestivalsFawaz Parto100% (1)
- Libro Astrom-Ch4 Control SystemsDocument33 pagesLibro Astrom-Ch4 Control SystemsjuliolaurensPas encore d'évaluation
- Lec02 2012eightDocument5 pagesLec02 2012eightPhạm Ngọc HòaPas encore d'évaluation
- Aircraft RotorcraftDocument26 pagesAircraft Rotorcraftmoj33Pas encore d'évaluation
- Eeee PDFDocument4 pagesEeee PDFFawaz PartoPas encore d'évaluation
- 2392 3302 PDFDocument80 pages2392 3302 PDFFawaz PartoPas encore d'évaluation
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Documentation Report On School's Direction SettingDocument24 pagesDocumentation Report On School's Direction SettingSheila May FielPas encore d'évaluation
- Executive Summary: 2013 Edelman Trust BarometerDocument12 pagesExecutive Summary: 2013 Edelman Trust BarometerEdelman100% (4)
- Resume - James MathewsDocument2 pagesResume - James Mathewsapi-610738092Pas encore d'évaluation
- Darkle Slideshow by SlidesgoDocument53 pagesDarkle Slideshow by SlidesgoADITI GUPTAPas encore d'évaluation
- PDS DeltaV SimulateDocument9 pagesPDS DeltaV SimulateJesus JuarezPas encore d'évaluation
- Management Accounting by Cabrera Solution Manual 2011 PDFDocument3 pagesManagement Accounting by Cabrera Solution Manual 2011 PDFClaudette Clemente100% (1)
- Transportation of CementDocument13 pagesTransportation of CementKaustubh Joshi100% (1)
- Applications of Wireless Sensor Networks: An Up-to-Date SurveyDocument24 pagesApplications of Wireless Sensor Networks: An Up-to-Date SurveyFranco Di NatalePas encore d'évaluation
- Stress Management HandoutsDocument3 pagesStress Management HandoutsUsha SharmaPas encore d'évaluation
- Ficha Tecnica Bomba Inyeccion MiniFlex EDocument1 pageFicha Tecnica Bomba Inyeccion MiniFlex Ejohn frader arrubla50% (2)
- str-w6754 Ds enDocument8 pagesstr-w6754 Ds enAdah BumbonPas encore d'évaluation
- Sabian Aspect OrbsDocument8 pagesSabian Aspect Orbsellaella13100% (2)
- 28 TerminalsDocument42 pages28 TerminalsAlin FazacasPas encore d'évaluation
- Engineering Ethics in Practice ShorterDocument79 pagesEngineering Ethics in Practice ShorterPrashanta NaikPas encore d'évaluation
- BPS C1: Compact All-Rounder in Banknote ProcessingDocument2 pagesBPS C1: Compact All-Rounder in Banknote ProcessingMalik of ChakwalPas encore d'évaluation
- BSS Troubleshooting Manual PDFDocument220 pagesBSS Troubleshooting Manual PDFleonardomarinPas encore d'évaluation
- Spectroscopic Methods For Determination of DexketoprofenDocument8 pagesSpectroscopic Methods For Determination of DexketoprofenManuel VanegasPas encore d'évaluation
- Waves and Ocean Structures Journal of Marine Science and EngineeringDocument292 pagesWaves and Ocean Structures Journal of Marine Science and Engineeringheinz billPas encore d'évaluation
- Week 3 Lab Arado, Patrick James M.Document2 pagesWeek 3 Lab Arado, Patrick James M.Jeffry AradoPas encore d'évaluation
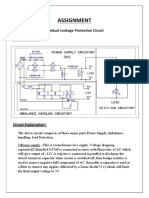
- Assignment: Residual Leakage Protection Circuit Circuit DiagramDocument2 pagesAssignment: Residual Leakage Protection Circuit Circuit DiagramShivam ShrivastavaPas encore d'évaluation
- 5.1 Behaviour of Water in Rocks and SoilsDocument5 pages5.1 Behaviour of Water in Rocks and SoilsHernandez, Mark Jyssie M.Pas encore d'évaluation
- EPW, Vol.58, Issue No.44, 04 Nov 2023Document66 pagesEPW, Vol.58, Issue No.44, 04 Nov 2023akashupscmadeeasePas encore d'évaluation
- Sheet-Metal Forming Processes: Group 9 PresentationDocument90 pagesSheet-Metal Forming Processes: Group 9 PresentationjssrikantamurthyPas encore d'évaluation
- ISO Position ToleranceDocument15 pagesISO Position ToleranceНиколай КалугинPas encore d'évaluation
- Bring Your Gear 2010: Safely, Easily and in StyleDocument76 pagesBring Your Gear 2010: Safely, Easily and in StyleAkoumpakoula TampaoulatoumpaPas encore d'évaluation
- FS-1040 FS-1060DN: Parts ListDocument23 pagesFS-1040 FS-1060DN: Parts List1980cvvrPas encore d'évaluation
- Diverging Lenses - Object-Image Relations: Previously in Lesson 5 Double Concave LensesDocument2 pagesDiverging Lenses - Object-Image Relations: Previously in Lesson 5 Double Concave LensesleonPas encore d'évaluation
- Maximum and Minimum PDFDocument3 pagesMaximum and Minimum PDFChai Usajai UsajaiPas encore d'évaluation
- Cause Analysis For Spun Pile Crack and BrokenDocument11 pagesCause Analysis For Spun Pile Crack and BrokenRony LesbtPas encore d'évaluation
- Static Electrification: Standard Test Method ForDocument10 pagesStatic Electrification: Standard Test Method Forastewayb_964354182Pas encore d'évaluation