Vous aimerez peut-être aussi
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Ice Navigation in Canadian WatersDocument219 pagesIce Navigation in Canadian WatersPARALELO10100% (1)
- Art Prizes AustraliaDocument44 pagesArt Prizes AustraliarosemusePas encore d'évaluation
- Richardson - 2020 - Witnessing The Anthropocene Affect and The Problem of ScaleDocument22 pagesRichardson - 2020 - Witnessing The Anthropocene Affect and The Problem of ScaleRoberto Oscar TaccettaPas encore d'évaluation
- Personal StatementDocument1 pagePersonal Statementapi-457845562Pas encore d'évaluation
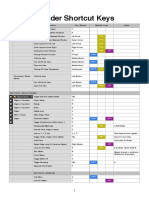
- Blender Shortcuts: Shortcut Name AttributeDocument2 pagesBlender Shortcuts: Shortcut Name AttributeYe GaungPas encore d'évaluation
- Blaupunkt-Manual-Vollv Android4.1 800 NGDocument44 pagesBlaupunkt-Manual-Vollv Android4.1 800 NGkaptainkPas encore d'évaluation
- Colossal Hand and Torch Liberty - Digital File From Original Library of CongressDocument7 pagesColossal Hand and Torch Liberty - Digital File From Original Library of CongressSarah FeyPas encore d'évaluation
- Por TermimarDocument32 pagesPor TermimarAlexander AustiinPas encore d'évaluation
- Breakthrough DNA FREE REPORT PDFDocument33 pagesBreakthrough DNA FREE REPORT PDFJuan Isaac100% (1)
- T.V Engineering. Learning Outcome:: 1. Basic of Television Scanning and SynchronizingDocument7 pagesT.V Engineering. Learning Outcome:: 1. Basic of Television Scanning and SynchronizingRuhulamin SiddiquePas encore d'évaluation
- Blender Keyboard Shortcuts PDFDocument2 pagesBlender Keyboard Shortcuts PDFandrei8sucaciuPas encore d'évaluation
- China Customs RegulationsDocument4 pagesChina Customs RegulationswonghelenPas encore d'évaluation
- The Curators ObristDocument4 pagesThe Curators ObristVictor LopezPas encore d'évaluation
- Owner'S Manual: Downloaded From Manuals Search EngineDocument42 pagesOwner'S Manual: Downloaded From Manuals Search EngineGabriel Mata MataPas encore d'évaluation
- You Cannot See Me From Where I Look at Myself-Francesca WoodmanDocument9 pagesYou Cannot See Me From Where I Look at Myself-Francesca WoodmanJinyeong Park100% (1)
- A Study of Global Sand Seas - 1979Document448 pagesA Study of Global Sand Seas - 1979geoecologistPas encore d'évaluation
- 'Psycho' Shower Scene AnalysisDocument2 pages'Psycho' Shower Scene AnalysisRonan Roux100% (1)
- Splash News V SimpsonDocument9 pagesSplash News V SimpsonTHROnline100% (1)
- PowerShot SX70 HS Advanced User Guide enDocument289 pagesPowerShot SX70 HS Advanced User Guide enDoruPas encore d'évaluation
- Artistic Landscape Photography by Wall, 1896Document186 pagesArtistic Landscape Photography by Wall, 1896geoecologist100% (1)
- Dahua Technology Product Catalog 2017 WebDocument40 pagesDahua Technology Product Catalog 2017 Webphuocloc1019Pas encore d'évaluation
- Analysis of Good Will HuntingDocument4 pagesAnalysis of Good Will HuntingArijit PaulPas encore d'évaluation
- Hikvision Model Name Coding RuleDocument3 pagesHikvision Model Name Coding RuletanapakPas encore d'évaluation
- PINAC, Inc - Executive Summary - FINALDocument8 pagesPINAC, Inc - Executive Summary - FINALCarlos Miller100% (1)
- MCM 107 Week 5Document7 pagesMCM 107 Week 5ERNEST JUSTICEPas encore d'évaluation
- Instruction Manual Mount Change Instructions Zeiss Cinema Zoom LensesDocument24 pagesInstruction Manual Mount Change Instructions Zeiss Cinema Zoom LensesdimodimoPas encore d'évaluation
- SPM 4531 2006 Physics p2 BerjawapanDocument24 pagesSPM 4531 2006 Physics p2 Berjawapanpss smk selandar64% (11)
- English For Tour Guides - Presentation.sbDocument13 pagesEnglish For Tour Guides - Presentation.sbivyhuyen100% (2)
- Fall 2018 Quadrille CatalogDocument84 pagesFall 2018 Quadrille CatalogChronicleBooksPas encore d'évaluation
- Free Speech Systems v. MenzelDocument6 pagesFree Speech Systems v. MenzelRussell BrandomPas encore d'évaluation