Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (890)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Cug August PaymentDocument1 pageCug August PaymentdaskhagoPas encore d'évaluation
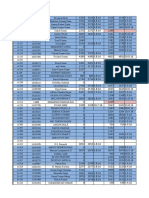
- HALL OF RESIDENCE NO. VII STUDENT MESS BILLDocument379 pagesHALL OF RESIDENCE NO. VII STUDENT MESS BILLdaskhagoPas encore d'évaluation
- Notice: Hostel in From WillDocument1 pageNotice: Hostel in From WilldaskhagoPas encore d'évaluation
- Pranveer Singh Group of Institutions, Nh-2, Bhauti, Kanpur Bus Route No.1 ONLY Dated .11.11.2018Document2 pagesPranveer Singh Group of Institutions, Nh-2, Bhauti, Kanpur Bus Route No.1 ONLY Dated .11.11.2018daskhagoPas encore d'évaluation
- HALL OF RESIDENCE NO. VII STUDENT MESS BILLDocument379 pagesHALL OF RESIDENCE NO. VII STUDENT MESS BILLdaskhagoPas encore d'évaluation
- SgfbsfbsDocument6 pagesSgfbsfbsdaskhagoPas encore d'évaluation
- Weibull plots for stretch levels of materialDocument3 pagesWeibull plots for stretch levels of materialdaskhagoPas encore d'évaluation
- Moonish Crazing PDFDocument1 pageMoonish Crazing PDFdaskhagoPas encore d'évaluation
- DcascascDocument16 pagesDcascascdaskhagoPas encore d'évaluation
- New Work 6Document4 pagesNew Work 6daskhagoPas encore d'évaluation
- HALL OF RESIDENCE NO. VII STUDENT MESS BILLDocument379 pagesHALL OF RESIDENCE NO. VII STUDENT MESS BILLdaskhagoPas encore d'évaluation
- Dielectric element nodal positions and connectivity for 1V electrodesDocument1 pageDielectric element nodal positions and connectivity for 1V electrodesdaskhagoPas encore d'évaluation
- SDVSZZSFBDocument10 pagesSDVSZZSFBdaskhagoPas encore d'évaluation
- DVSVVDocument4 pagesDVSVVdaskhagoPas encore d'évaluation
- HALL OF RESIDENCE NO. VII STUDENT MESS BILLDocument379 pagesHALL OF RESIDENCE NO. VII STUDENT MESS BILLdaskhagoPas encore d'évaluation
- New Work 4Document3 pagesNew Work 4daskhagoPas encore d'évaluation
- HALL OF RESIDENCE NO. VII STUDENT MESS BILLDocument379 pagesHALL OF RESIDENCE NO. VII STUDENT MESS BILLdaskhagoPas encore d'évaluation
- Marc Mess PaymentDocument1 pageMarc Mess PaymentdaskhagoPas encore d'évaluation
- Schematic Diagram Electrode Assembly PDFDocument1 pageSchematic Diagram Electrode Assembly PDFdaskhagoPas encore d'évaluation
- HALL OF RESIDENCE NO. VII STUDENT MESS BILLDocument379 pagesHALL OF RESIDENCE NO. VII STUDENT MESS BILLdaskhagoPas encore d'évaluation
- HALL OF RESIDENCE NO. VII STUDENT MESS BILLDocument379 pagesHALL OF RESIDENCE NO. VII STUDENT MESS BILLdaskhagoPas encore d'évaluation
- HALL OF RESIDENCE NO. VII STUDENT MESS BILLDocument379 pagesHALL OF RESIDENCE NO. VII STUDENT MESS BILLdaskhagoPas encore d'évaluation
- Application Form Regular Faculty150816111245 PDFDocument7 pagesApplication Form Regular Faculty150816111245 PDFdaskhagoPas encore d'évaluation
- Full Length Paper INCAM2015 1Document3 pagesFull Length Paper INCAM2015 1daskhagoPas encore d'évaluation
- Mess DuesDocument1 pageMess DuesdaskhagoPas encore d'évaluation
- Freely-jointed polymer chain modelDocument6 pagesFreely-jointed polymer chain modelkhayatPas encore d'évaluation
- Paymnet and Receipt Onward June-16..Document31 pagesPaymnet and Receipt Onward June-16..daskhagoPas encore d'évaluation
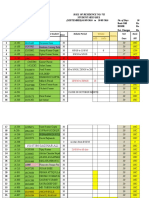
- September Mess Bill-2016Document365 pagesSeptember Mess Bill-2016daskhagoPas encore d'évaluation
- Mess Menu 1 December 2016Document2 pagesMess Menu 1 December 2016daskhagoPas encore d'évaluation
- PSO TutorialDocument38 pagesPSO Tutoriallabyrinth43100% (1)
- MS - Topic8 - Transportation FINALSDocument116 pagesMS - Topic8 - Transportation FINALSYleighnna DelunaPas encore d'évaluation
- Elmasri and Navathe DBMS Concepts 27Document10 pagesElmasri and Navathe DBMS Concepts 27Abdul Ghani KhanPas encore d'évaluation
- An Efficient K-Means Clustering Algorithm: Analysis and ImplementationDocument12 pagesAn Efficient K-Means Clustering Algorithm: Analysis and ImplementationUnaixa KhanPas encore d'évaluation
- 10.1007 - 978 3 319 33003 7 - 11Document10 pages10.1007 - 978 3 319 33003 7 - 11Lowleary1942Pas encore d'évaluation
- 03 Ot-1Document15 pages03 Ot-1umang.parmar112597Pas encore d'évaluation
- Alogorithm and DS PG DAC - Aug 19Document34 pagesAlogorithm and DS PG DAC - Aug 19ravi malegavePas encore d'évaluation
- Process Scheduling AlgorithmsDocument3 pagesProcess Scheduling AlgorithmsKartik VermaPas encore d'évaluation
- The Kernighan - Lin AlgorithmDocument3 pagesThe Kernighan - Lin AlgorithmrounakanchalPas encore d'évaluation
- Section 4 Further Problem-Solving and Programming SkillsDocument26 pagesSection 4 Further Problem-Solving and Programming SkillsTrynosPas encore d'évaluation
- Lec03-Nonrec Analysis PDFDocument59 pagesLec03-Nonrec Analysis PDFAl BasyirPas encore d'évaluation
- Data Structure NotesDocument171 pagesData Structure NoteskavirajeePas encore d'évaluation
- Subject: DSTC++: Unit-I: Above Average Questions Short QuestionsDocument7 pagesSubject: DSTC++: Unit-I: Above Average Questions Short QuestionsNaveen KumarPas encore d'évaluation
- Quantitative Methods: Instructor: DR: Abdelhamid MostafaDocument18 pagesQuantitative Methods: Instructor: DR: Abdelhamid MostafaNourhan KhaledPas encore d'évaluation
- Assi 14Document3 pagesAssi 14saniyatemp05Pas encore d'évaluation
- String Matching 0Document40 pagesString Matching 0avikantk94Pas encore d'évaluation
- Implement Queue Using Stack Data StructureDocument4 pagesImplement Queue Using Stack Data StructurepreethiPas encore d'évaluation
- All Java Practicals-BalajiDocument64 pagesAll Java Practicals-BalajiAshok YadavPas encore d'évaluation
- Design and Analysis of Algorithms Lecture NotesDocument136 pagesDesign and Analysis of Algorithms Lecture NotesHrithik KumarPas encore d'évaluation
- CH 05 Transportation Model and Its VarianceDocument70 pagesCH 05 Transportation Model and Its VarianceAura fairuzPas encore d'évaluation
- Data Structure Lab ManualDocument77 pagesData Structure Lab ManualkunalPas encore d'évaluation
- Spanning TreeDocument7 pagesSpanning TreeajithPas encore d'évaluation
- 200 ObjectiveType QuestionsDocument33 pages200 ObjectiveType QuestionsKaushal KishorePas encore d'évaluation
- Sparse Vector Methods: Lecture #13 EEE 574 Dr. Dan TylavskyDocument24 pagesSparse Vector Methods: Lecture #13 EEE 574 Dr. Dan Tylavskyhonestman_usaPas encore d'évaluation
- Practical - 1: Objective: To Insert and Delete Elements at Specified Locations in An ArrayDocument12 pagesPractical - 1: Objective: To Insert and Delete Elements at Specified Locations in An ArrayParikshit SharmaPas encore d'évaluation
- Algorithms and Complexity: Finding the Optimal SolutionDocument10 pagesAlgorithms and Complexity: Finding the Optimal SolutionHyenas 9Pas encore d'évaluation
- Recursive Functions UpdatedDocument8 pagesRecursive Functions UpdatedAPas encore d'évaluation
- Desain Analisa AlgoritmaDocument14 pagesDesain Analisa AlgoritmaTommy Hizkia0% (1)
- Finding A Point On A Bézier Curve - de Casteljau's AlgorithmDocument4 pagesFinding A Point On A Bézier Curve - de Casteljau's Algorithmchandraveer0709Pas encore d'évaluation
- Machine Learning Revision NotesDocument6 pagesMachine Learning Revision NotesGaurav TendolkarPas encore d'évaluation