Vous aimerez peut-être aussi
- Bedini's Free Energy Generator PDFDocument7 pagesBedini's Free Energy Generator PDFRafly Attila Al-Fiqri71% (7)
- AerE 351 Rocket Optimization PDFDocument8 pagesAerE 351 Rocket Optimization PDFAnonymous RJZnbDDNPas encore d'évaluation
- PNEUMATICS AND AIR CIRCUITS UNDERSTANDING THE CASCADE VALVE AND PLC UNDERSTANDINGD'EverandPNEUMATICS AND AIR CIRCUITS UNDERSTANDING THE CASCADE VALVE AND PLC UNDERSTANDINGPas encore d'évaluation
- ME2142E Speed or Position Control of A DC MotorDocument10 pagesME2142E Speed or Position Control of A DC MotorCinderella021275% (4)
- ATS - Design Manual CaterpillarDocument84 pagesATS - Design Manual CaterpillarSharik Khan100% (1)
- Lab Manual: Control Systems Design and Analysis: Using The Quanser Controls Board For NI ELVIS IIIDocument12 pagesLab Manual: Control Systems Design and Analysis: Using The Quanser Controls Board For NI ELVIS IIImishtinilPas encore d'évaluation
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetD'EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetÉvaluation : 2 sur 5 étoiles2/5 (1)
- Slope ND DeflectionDocument19 pagesSlope ND DeflectionprashantbaraskarPas encore d'évaluation
- Interactions and Incompatibilities of Pharmaceutical ExcipientsDocument24 pagesInteractions and Incompatibilities of Pharmaceutical ExcipientsEmmanuel Vachon LachancePas encore d'évaluation
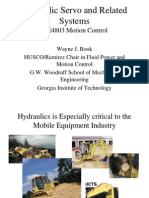
- ME4803 Motion Control: The Strengths and Design of Fluid Power SystemsDocument36 pagesME4803 Motion Control: The Strengths and Design of Fluid Power SystemssayproPas encore d'évaluation
- Control of DC Motor Using Different Control StrategiesD'EverandControl of DC Motor Using Different Control StrategiesPas encore d'évaluation
- Modelado Rotary Pendulum Workbook InstructorDocument60 pagesModelado Rotary Pendulum Workbook Instructorsolid34Pas encore d'évaluation
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlD'EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlÉvaluation : 5 sur 5 étoiles5/5 (1)
- Pelton Wheel Experiment Performance AnalysisDocument5 pagesPelton Wheel Experiment Performance AnalysisCaleb KreegerPas encore d'évaluation
- Lab10b - SERVO TRAINER 2 Response Calculating and MeasurementsDocument8 pagesLab10b - SERVO TRAINER 2 Response Calculating and MeasurementssairafiPas encore d'évaluation
- DC Motor System - Open LoopDocument22 pagesDC Motor System - Open LoopSivesh SinghPas encore d'évaluation
- Experiment No: 1 Speed Control of DC Motor: Experimental Setup Containing The Following UnitsDocument6 pagesExperiment No: 1 Speed Control of DC Motor: Experimental Setup Containing The Following UnitsdeepakPas encore d'évaluation
- Dieu TocDocument20 pagesDieu TocladoiblPas encore d'évaluation
- ELEC 5565 - Electric Drives and CTRL LabDocument13 pagesELEC 5565 - Electric Drives and CTRL LabNur Azlin Mohd YusoffPas encore d'évaluation
- DC Control MethodDocument22 pagesDC Control MethodSyed Haidar Ali ZaidiPas encore d'évaluation
- 6655 Control HandoutDocument133 pages6655 Control Handouthann_dlePas encore d'évaluation
- Researches Regarding Functional Stabilization of Electro-Hydraulic Servo-SystemsDocument4 pagesResearches Regarding Functional Stabilization of Electro-Hydraulic Servo-SystemsMaria Gabriela BusteloPas encore d'évaluation
- Control system labDocument15 pagesControl system labhassan ullah khanPas encore d'évaluation
- acs_2017s2_assn1Document5 pagesacs_2017s2_assn1MiraelPas encore d'évaluation
- Me2142-2 Speed/Position Control of A DC Motor: Department of Mechanical Engineering National University of SingaporeDocument9 pagesMe2142-2 Speed/Position Control of A DC Motor: Department of Mechanical Engineering National University of SingaporeDeepak RainaPas encore d'évaluation
- An Adaptive Fuzzy Pid Control of Hydro-Turbine Governor: Xiao-Ying Zhang, Ming-Guang ZhangDocument5 pagesAn Adaptive Fuzzy Pid Control of Hydro-Turbine Governor: Xiao-Ying Zhang, Ming-Guang ZhangPadmo PadmundonoPas encore d'évaluation
- DC Motor Speed Control For Electric Locomotive Equipped by Multi-Level DC-DC ConverterDocument7 pagesDC Motor Speed Control For Electric Locomotive Equipped by Multi-Level DC-DC Convertervinay kumarPas encore d'évaluation
- AEROSPACE LAB EXPERIMENT ON SERVO CONTROLDocument24 pagesAEROSPACE LAB EXPERIMENT ON SERVO CONTROLhishamwahidinPas encore d'évaluation
- Speed Control of DC Servo Motor Using PIDocument26 pagesSpeed Control of DC Servo Motor Using PIUjjawal DarvaikarPas encore d'évaluation
- Designing PID AlgorithmDocument7 pagesDesigning PID AlgorithmVu Duc TruongPas encore d'évaluation
- Industrial Emulator Manual Chapter 4 Thru 6Document37 pagesIndustrial Emulator Manual Chapter 4 Thru 6Jake DaytonPas encore d'évaluation
- Chapter 5 - Energy Analysis For Open Systems Compatibility ModeDocument35 pagesChapter 5 - Energy Analysis For Open Systems Compatibility ModekhameesmarwanPas encore d'évaluation
- Modeling of Open Loop System and Study of Their Open Loop ResponseDocument13 pagesModeling of Open Loop System and Study of Their Open Loop ResponseAyaz Masud Sezan50% (2)
- lab 3Document17 pageslab 3hassan ullah khanPas encore d'évaluation
- acs_2019s2_assn1Document5 pagesacs_2019s2_assn1MiraelPas encore d'évaluation
- Speed of motor which I'd controlDocument15 pagesSpeed of motor which I'd controlsagarahir151Pas encore d'évaluation
- A Sliding Mode-Multimodel Control For A Sensorless Pumping SystemDocument6 pagesA Sliding Mode-Multimodel Control For A Sensorless Pumping SystemKatherine DukePas encore d'évaluation
- Airpax Stepper MotorDocument8 pagesAirpax Stepper MotorTiago GalloPas encore d'évaluation
- Stepper Motor Speed ProfileDocument5 pagesStepper Motor Speed ProfileCharoensak Charayaphan100% (1)
- lab 2 contorl systemDocument14 pageslab 2 contorl systemhassan ullah khanPas encore d'évaluation
- Two tank non-interacting liquid level PID controlDocument9 pagesTwo tank non-interacting liquid level PID controlHimanshu JatPas encore d'évaluation
- Control System NotesDocument199 pagesControl System NotesCarson R. Dick100% (2)
- Unit 4 Lecture 09 Stability Assessment Using Point by Point MethodDocument16 pagesUnit 4 Lecture 09 Stability Assessment Using Point by Point MethodAditya AdityaPas encore d'évaluation
- Exp 10 Transient Stability AnalysisDocument6 pagesExp 10 Transient Stability AnalysisPuduru BharathiPas encore d'évaluation
- AkhilsinghDocument13 pagesAkhilsinghalpha kumarPas encore d'évaluation
- Tm450 Acopos Control Concept and AdjustmentDocument51 pagesTm450 Acopos Control Concept and Adjustmentsatish734Pas encore d'évaluation
- SantaDocument11 pagesSantaVashik BedasiePas encore d'évaluation
- Control of DC Electric MotorDocument16 pagesControl of DC Electric MotorNa ChPas encore d'évaluation
- Control Systems Lab #3: Stability AnalysisDocument5 pagesControl Systems Lab #3: Stability Analysisahmed shahPas encore d'évaluation
- Lab 2: Quanser Hardware and Proportional Control: I. ObjectiveDocument7 pagesLab 2: Quanser Hardware and Proportional Control: I. ObjectiveAndré LeopoldinoPas encore d'évaluation
- Control of A Wind Energy Conversion System Associated To A Flywheel Energy Storage SystemDocument6 pagesControl of A Wind Energy Conversion System Associated To A Flywheel Energy Storage SystemhassenbbPas encore d'évaluation
- Measure Flow Rate Using an Orifice MeterDocument11 pagesMeasure Flow Rate Using an Orifice MeterKasar nagib 2002Pas encore d'évaluation
- Proportional-Integral-Derivative (PID) Control: Velocity ResponseDocument34 pagesProportional-Integral-Derivative (PID) Control: Velocity ResponseFadi AlbatshPas encore d'évaluation
- Chap5 Open SystemDocument19 pagesChap5 Open SystemRoberto Pu100% (4)
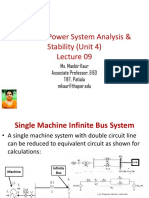
- Unit 4 Lecture 08 Stability Assessment Under Three Phase Fault at Mid Point of Double Circuit LineDocument14 pagesUnit 4 Lecture 08 Stability Assessment Under Three Phase Fault at Mid Point of Double Circuit LineAditya AdityaPas encore d'évaluation
- DC Motor Speed Control Part II: PID FeedbackDocument4 pagesDC Motor Speed Control Part II: PID FeedbackEbd RahmanPas encore d'évaluation
- Mobile Robot Simulation and Control: System DefinitionDocument16 pagesMobile Robot Simulation and Control: System DefinitionRavindra BishtPas encore d'évaluation
- DTrends Feb 2011Document14 pagesDTrends Feb 2011Rui AllenPas encore d'évaluation
- Research Article: DC Motor Parameter Identification Using Speed Step ResponsesDocument5 pagesResearch Article: DC Motor Parameter Identification Using Speed Step ResponsesDawn VargasPas encore d'évaluation
- Design of Photo Voltaic Water-Pump Control System Based On TMS320F2812Document8 pagesDesign of Photo Voltaic Water-Pump Control System Based On TMS320F2812manikanta241Pas encore d'évaluation
- Philadelphia: Faculty of Engineering and TechnologyDocument10 pagesPhiladelphia: Faculty of Engineering and TechnologyHani BanatPas encore d'évaluation
- Icee2015 Paper Id3911Document4 pagesIcee2015 Paper Id3911Zellagui EnergyPas encore d'évaluation
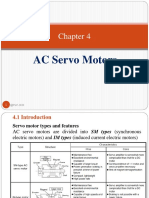
- Ac ServoDocument38 pagesAc ServoPhạm Hữu KỳPas encore d'évaluation
- Application of Dynamic Programming To Optimization of Running Profile of A TrainDocument10 pagesApplication of Dynamic Programming To Optimization of Running Profile of A Trainbasardeniz87Pas encore d'évaluation
- ENGLISH MECHANICAL ENGINEERING UNIT 8: CORROSIONDocument22 pagesENGLISH MECHANICAL ENGINEERING UNIT 8: CORROSIONTo Ba Tho100% (1)
- Servo Drive Systems - Chapter 3Document52 pagesServo Drive Systems - Chapter 3To Ba ThoPas encore d'évaluation
- Servo Drive Systems - Chapter 3Document52 pagesServo Drive Systems - Chapter 3To Ba ThoPas encore d'évaluation
- ENGLISH MECHANICAL ENGINEERING UNIT 8: CORROSIONDocument22 pagesENGLISH MECHANICAL ENGINEERING UNIT 8: CORROSIONTo Ba Tho100% (1)
- S Complete Guide To The TOEIC - Tape Script & Answer KeysDocument64 pagesS Complete Guide To The TOEIC - Tape Script & Answer KeysAli PhamPas encore d'évaluation
- Practical Guide To The New Toeic - Practice Tests PDFDocument102 pagesPractical Guide To The New Toeic - Practice Tests PDFTo Ba ThoPas encore d'évaluation
- Practical Guide To The New Toeic - Practice Tests PDFDocument102 pagesPractical Guide To The New Toeic - Practice Tests PDFTo Ba ThoPas encore d'évaluation
- Cuentos en InglesDocument36 pagesCuentos en InglesJOSE JUAN100% (2)
- Mang EthernetDocument73 pagesMang EthernetTo Ba ThoPas encore d'évaluation
- Pi Mbus 300 PDFDocument121 pagesPi Mbus 300 PDFhipercortexPas encore d'évaluation
- Thermodynamics of Weak Electrolytes Including H3PO4Document10 pagesThermodynamics of Weak Electrolytes Including H3PO4buhalnitaPas encore d'évaluation
- Chemical Purification Methods ListDocument8 pagesChemical Purification Methods ListMd.Mehdi MasudPas encore d'évaluation
- Heat of Hydration StressesDocument7 pagesHeat of Hydration StressesAnkur BarsainyaPas encore d'évaluation
- Materials Finer Than 75 - M (No. 200) Sieve in Mineral Aggregates by WashingDocument3 pagesMaterials Finer Than 75 - M (No. 200) Sieve in Mineral Aggregates by WashingLucio Rodriguez SifuentesPas encore d'évaluation
- Flight Equations of Motion for 6 DOF Aircraft ModelDocument24 pagesFlight Equations of Motion for 6 DOF Aircraft ModelNeetu SharmaPas encore d'évaluation
- On Errors of Fit and Accuracy in Matching Synthetic Seismograms and Seismic TracesDocument21 pagesOn Errors of Fit and Accuracy in Matching Synthetic Seismograms and Seismic TracesBSSPas encore d'évaluation
- 08 Energy 03 Complementary Strain Energy PDFDocument2 pages08 Energy 03 Complementary Strain Energy PDFjack_hero_56Pas encore d'évaluation
- I. Turek Et Al - Exchange Interactions, Spin Waves, and Transition Temperatures in Itinerant MagnetsDocument36 pagesI. Turek Et Al - Exchange Interactions, Spin Waves, and Transition Temperatures in Itinerant MagnetsTellusz4532Pas encore d'évaluation
- Wiki Unified Soil Classification SystemDocument2 pagesWiki Unified Soil Classification SystemGIRISHA001Pas encore d'évaluation
- Meteorology and Wind Resource Geostrophic BalanceDocument10 pagesMeteorology and Wind Resource Geostrophic BalanceSilvio NunesPas encore d'évaluation
- Principles of CT and CT TechnologyDocument15 pagesPrinciples of CT and CT TechnologyLida Velasquez SierraPas encore d'évaluation
- Homework #02 (Phy 112) SolutionsDocument19 pagesHomework #02 (Phy 112) SolutionsKvn4N6Pas encore d'évaluation
- Elders Ray SYstemsDocument7 pagesElders Ray SYstemssagarmkale4395Pas encore d'évaluation
- SRS 413Document158 pagesSRS 413edderguiPas encore d'évaluation
- Learning Plan in Grade 8 and Grade 7Document14 pagesLearning Plan in Grade 8 and Grade 7marilyncomia73100% (3)
- Star and GalaxiesDocument32 pagesStar and GalaxiesMazura AhmadPas encore d'évaluation
- Laser Beam Energy Distribution Affects Weld DimensionsDocument8 pagesLaser Beam Energy Distribution Affects Weld Dimensionskppsiva87Pas encore d'évaluation
- Theory of Chemical Kinetics and Charge Transfer Based On Nonequilibrium ThermodynamicsDocument17 pagesTheory of Chemical Kinetics and Charge Transfer Based On Nonequilibrium ThermodynamicsYoana Yoa YoaPas encore d'évaluation
- Norma Japonesa Aij-Rlb-1996Document36 pagesNorma Japonesa Aij-Rlb-1996AnaApcarianPas encore d'évaluation
- Adjoint Rans With Filtered Shape Derivatives For Hydrodynamic OptimisationDocument11 pagesAdjoint Rans With Filtered Shape Derivatives For Hydrodynamic Optimisationvolo87Pas encore d'évaluation
- Teacher Guide Activity 2 AccelerationDocument4 pagesTeacher Guide Activity 2 AccelerationCanada Railway TimesPas encore d'évaluation
- Bleeding of ConcreteDocument3 pagesBleeding of ConcreteAPas encore d'évaluation
- MCQ Electromagnetism Self-AssessmentDocument2 pagesMCQ Electromagnetism Self-AssessmentJunaidKhanPas encore d'évaluation
- Resistivity and Saturation in ShalesDocument6 pagesResistivity and Saturation in ShalesAngelMesoPas encore d'évaluation