Vous aimerez peut-être aussi
- Pinhole Camera Model: Understanding Perspective through Computational OpticsD'EverandPinhole Camera Model: Understanding Perspective through Computational OpticsPas encore d'évaluation
- 3D Stereo CameraDocument7 pages3D Stereo CameraCharoensak CharayaphanPas encore d'évaluation
- Stereo 3d VisionDocument53 pagesStereo 3d Visionatom tuxPas encore d'évaluation
- Image Formation: - The Two Parts of The Image Formation ProcessDocument9 pagesImage Formation: - The Two Parts of The Image Formation ProcessAaqib IhrazPas encore d'évaluation
- Why Camera Modeling?: Image ProcessingDocument10 pagesWhy Camera Modeling?: Image ProcessingRaju BhaiPas encore d'évaluation
- Image Formation: - The Two Parts of The Image Formation ProcessDocument9 pagesImage Formation: - The Two Parts of The Image Formation ProcessRaaja RajaPas encore d'évaluation
- 3D ViewingDocument3 pages3D ViewinganushkaPas encore d'évaluation
- 04 3D Viewing (Engl)Document4 pages04 3D Viewing (Engl)veerendraPas encore d'évaluation
- CG Unit 5Document49 pagesCG Unit 5Lalitha PonnamPas encore d'évaluation
- 7.3 Softcopy-Based Systems 215: 7.3.2 Stereo EnvironmentDocument6 pages7.3 Softcopy-Based Systems 215: 7.3.2 Stereo Environmenttirto babbaPas encore d'évaluation
- Module 7: Robot Vision I Lecture 26: The Imaging Transformation ObjectivesDocument4 pagesModule 7: Robot Vision I Lecture 26: The Imaging Transformation ObjectivesImran AliPas encore d'évaluation
- Photogrammetry: DTM Extraction & EditingDocument20 pagesPhotogrammetry: DTM Extraction & EditingNovianti MarthenPas encore d'évaluation
- Please Read: A Personal Appeal From Wikipedia Founder Jimmy WalesDocument8 pagesPlease Read: A Personal Appeal From Wikipedia Founder Jimmy WalesbeckybirdiePas encore d'évaluation
- 3D Reconstruction ModelDocument2 pages3D Reconstruction ModelAnand BalajiPas encore d'évaluation
- Unit 4-cg - ContiDocument10 pagesUnit 4-cg - ContiPriyanka H VPas encore d'évaluation
- Vision Project Report PDFDocument21 pagesVision Project Report PDFMuhammad AnsarPas encore d'évaluation
- Linear TriangulationDocument41 pagesLinear Triangulationsarbjot singhPas encore d'évaluation
- 08-Monocular Depth EstimationDocument15 pages08-Monocular Depth EstimationRajul RahmadPas encore d'évaluation
- Odetic PSIPDocument3 pagesOdetic PSIPdufrenoisPas encore d'évaluation
- 2D-to-3D Photo Rendering For 3D Displays: Comandu@dsi - Unifi.it Atsuto - Maki@crl - Toshiba.co - UkDocument8 pages2D-to-3D Photo Rendering For 3D Displays: Comandu@dsi - Unifi.it Atsuto - Maki@crl - Toshiba.co - UkoidoithatdayPas encore d'évaluation
- 3D ReconstructionDocument11 pages3D ReconstructionZee DeckardPas encore d'évaluation
- Rendering Trees From Precomputed Z-Buffer ViewsDocument10 pagesRendering Trees From Precomputed Z-Buffer ViewsLuis Enrique PulidoPas encore d'évaluation
- Photogrammetry: What IsDocument9 pagesPhotogrammetry: What IsJairos ShinzehPas encore d'évaluation
- Multiple View Geometry: Richard Hartley and Andrew ZissermanDocument57 pagesMultiple View Geometry: Richard Hartley and Andrew ZissermanAlex KreimerPas encore d'évaluation
- Uncalibrated Euclidean Reconstruction A ReviewDocument9 pagesUncalibrated Euclidean Reconstruction A Reviewcnwu2013Pas encore d'évaluation
- VO TutorialDocument74 pagesVO TutorialHein HtetPas encore d'évaluation
- CG Uni 4 Part 2 NotesDocument18 pagesCG Uni 4 Part 2 Notesg.jananiPas encore d'évaluation
- Chap 6Document65 pagesChap 6EmanPas encore d'évaluation
- Controlling Light With Freeform Optics: Vladimir OlikerDocument3 pagesControlling Light With Freeform Optics: Vladimir OlikertttPas encore d'évaluation
- Lecture #2: C Camera ModelDocument38 pagesLecture #2: C Camera ModelElisa PopPas encore d'évaluation
- Plane Mirror Parity: Optical Systems 37Document5 pagesPlane Mirror Parity: Optical Systems 37David GraumannPas encore d'évaluation
- GijeongJang OpticsLetter2006Document3 pagesGijeongJang OpticsLetter2006g c agnihotriPas encore d'évaluation
- Geometry of Image Formation - LearnOpenCV #Document7 pagesGeometry of Image Formation - LearnOpenCV #KajalPas encore d'évaluation
- ITS Master 15963 Paper PDFDocument6 pagesITS Master 15963 Paper PDFAbdelrahim Hussam MoubayedPas encore d'évaluation
- !kannala Brandt CalibrationDocument15 pages!kannala Brandt CalibrationpchistPas encore d'évaluation
- ImageDocument14 pagesImageShanjuJossiahPas encore d'évaluation
- Lec - 11 - 12 - Introduction To Photogrammetry and Air SurveyDocument38 pagesLec - 11 - 12 - Introduction To Photogrammetry and Air SurveyGame changerPas encore d'évaluation
- Graphics Systems and Models: TopicsDocument15 pagesGraphics Systems and Models: TopicsElistinPas encore d'évaluation
- Math of PhotogrammetryDocument16 pagesMath of PhotogrammetryKen LimPas encore d'évaluation
- Realtime Omnidirectional Stereo For Obstacle Detection and Tracking in Dynamic EnvironmentsDocument6 pagesRealtime Omnidirectional Stereo For Obstacle Detection and Tracking in Dynamic Environmentsestraj1954Pas encore d'évaluation
- Autocalibration of An Ad Hoc Construction of Multi-Projector DisplaysDocument8 pagesAutocalibration of An Ad Hoc Construction of Multi-Projector DisplaysIonuț AvramescuPas encore d'évaluation
- Claus05rf ModelDocument7 pagesClaus05rf Modelmićo_banovićPas encore d'évaluation
- Perspective ProjectionDocument2 pagesPerspective ProjectionbhatiaharryjassiPas encore d'évaluation
- Geoinformatics Assignment EMDocument23 pagesGeoinformatics Assignment EMChhavi ChoudharyPas encore d'évaluation
- Camera Self-Calibration Theory and ExperimentsDocument14 pagesCamera Self-Calibration Theory and ExperimentsAndrey SolanoPas encore d'évaluation
- A Distortion Camera For Ray TracingDocument18 pagesA Distortion Camera For Ray TracingramsampathPas encore d'évaluation
- Assignment Computer VisionDocument4 pagesAssignment Computer Visionsheraz7288Pas encore d'évaluation
- Computer Graphics Imp1Document35 pagesComputer Graphics Imp1Aswin KVPas encore d'évaluation
- Automated Architecture Reconstruction From Close-Range PhotogrammetryDocument8 pagesAutomated Architecture Reconstruction From Close-Range PhotogrammetrySentinel BergPas encore d'évaluation
- Visual Modeling With A Hand-Held Camera: AbstractDocument26 pagesVisual Modeling With A Hand-Held Camera: AbstractLucas Thom RamosPas encore d'évaluation
- Unit 5Document28 pagesUnit 5Lakshya KarwaPas encore d'évaluation
- A Tutorial On Affine and Projective GeometriesDocument14 pagesA Tutorial On Affine and Projective GeometriesSnehal BhayaniPas encore d'évaluation
- Ee267 Notes TrackingDocument17 pagesEe267 Notes Trackingفاعل خيرPas encore d'évaluation
- 3차원 흐름 (원문)Document8 pages3차원 흐름 (원문)Yura JoPas encore d'évaluation
- Laboratory E Thin Lenses: Physics 111: Elementary PhysicsDocument8 pagesLaboratory E Thin Lenses: Physics 111: Elementary PhysicsCraigPas encore d'évaluation
- PhotogrammetryDocument33 pagesPhotogrammetryfirosekhan100% (1)
- Lens Light: in Barrel Distortion, Straight Lines Bulge Outwards at The Center, As in ADocument7 pagesLens Light: in Barrel Distortion, Straight Lines Bulge Outwards at The Center, As in AFaseela HarshadPas encore d'évaluation
- Lec 20Document12 pagesLec 20stathiss11Pas encore d'évaluation
- Articol Simpozion-Corectat PartialDocument6 pagesArticol Simpozion-Corectat PartialAlexandru AnaPas encore d'évaluation
- Oriented Projective Geometry For Computer VisionDocument10 pagesOriented Projective Geometry For Computer VisionjivasumanaPas encore d'évaluation
- Blender Tutorials - Noob To ProDocument700 pagesBlender Tutorials - Noob To ProDades NugrohoPas encore d'évaluation
- Survey Manual Chap 7 Photogrammetric SurveysDocument14 pagesSurvey Manual Chap 7 Photogrammetric SurveysSentinel BergPas encore d'évaluation
- Automated Architecture Reconstruction From Close-Range PhotogrammetryDocument8 pagesAutomated Architecture Reconstruction From Close-Range PhotogrammetrySentinel BergPas encore d'évaluation
- Towards Automatic Relative Orientation For Architectural PhotogrammetryDocument6 pagesTowards Automatic Relative Orientation For Architectural PhotogrammetrySentinel BergPas encore d'évaluation
- Cartographic Generalization in A Digital Environment When and How To GeneralizeDocument12 pagesCartographic Generalization in A Digital Environment When and How To GeneralizeSentinel BergPas encore d'évaluation
- Shuttle Radar Topography MissionDocument3 pagesShuttle Radar Topography MissionSentinel BergPas encore d'évaluation
- L TEX Title Template: John Smith University Name Department NameDocument1 pageL TEX Title Template: John Smith University Name Department NameSentinel BergPas encore d'évaluation
- Postgis Ver. 1.3.1 Quick Guide - Cheatsheet: PDF VersionDocument1 pagePostgis Ver. 1.3.1 Quick Guide - Cheatsheet: PDF VersionSentinel BergPas encore d'évaluation
- ReportDocument2 pagesReportSentinel BergPas encore d'évaluation
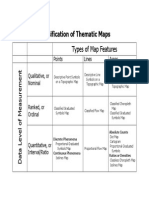
- Classification of Thematic Maps: Types of Map FeaturesDocument2 pagesClassification of Thematic Maps: Types of Map FeaturesSentinel BergPas encore d'évaluation
- Canon Product File 62650a0b2dd5fa5bDocument4 pagesCanon Product File 62650a0b2dd5fa5bSentinel BergPas encore d'évaluation
- CS6100: Topics in Design and Analysis of Algorithms: Delaunay Triangulation John AugustineDocument25 pagesCS6100: Topics in Design and Analysis of Algorithms: Delaunay Triangulation John AugustineSentinel BergPas encore d'évaluation
- Radar GeometryDocument1 pageRadar GeometrySentinel BergPas encore d'évaluation
- Final Report Guidelines July 2012Document6 pagesFinal Report Guidelines July 2012Sentinel BergPas encore d'évaluation
- Lecture 01Document68 pagesLecture 01sandy nagaraPas encore d'évaluation
- Importance of Responses To Stimuli in AnimalsDocument5 pagesImportance of Responses To Stimuli in AnimalsNavelyPas encore d'évaluation
- Full Download Futures Options and Swaps 5th Edition Kolb Solutions ManualDocument35 pagesFull Download Futures Options and Swaps 5th Edition Kolb Solutions Manualfract.hiation.7wtul100% (35)
- The Computer in HCIDocument55 pagesThe Computer in HCIsibhat mequanintPas encore d'évaluation
- Graphics Hardware: Input & Output DevicesDocument67 pagesGraphics Hardware: Input & Output DevicesparadoxPas encore d'évaluation
- P7-Materi Praktek Computer Vision With MATLABDocument76 pagesP7-Materi Praktek Computer Vision With MATLABRafael RPas encore d'évaluation
- Performance of Quickbird Image and Lidar Data Fusion For 2d/3d City MappingDocument13 pagesPerformance of Quickbird Image and Lidar Data Fusion For 2d/3d City MappingTony BuPas encore d'évaluation
- Top 10 BeagleBoard ProjectsDocument8 pagesTop 10 BeagleBoard ProjectsraakshasuduPas encore d'évaluation
- DICOM Supp91Document39 pagesDICOM Supp91Abhishek V PaiPas encore d'évaluation
- Service Manual: Better Service Better Reputation Better ProfitDocument294 pagesService Manual: Better Service Better Reputation Better Profitalive ElectronicsPas encore d'évaluation
- Instant Download Fundamentals of Corporate Finance 12th Edition Ross Solutions Manual PDF Full ChapterDocument32 pagesInstant Download Fundamentals of Corporate Finance 12th Edition Ross Solutions Manual PDF Full Chaptermiddleelanzj5r100% (11)
- Computer Graphics World 2009 04Document52 pagesComputer Graphics World 2009 04daka crtamPas encore d'évaluation
- Optoma 3D-XL Converter Users GuideDocument4 pagesOptoma 3D-XL Converter Users GuideMatt HughesPas encore d'évaluation
- Safety and Reference: Owner'S ManualDocument40 pagesSafety and Reference: Owner'S ManualRaj ThakurPas encore d'évaluation
- GitHub - NatronGitHub - Natron-Plugins - Natron Community Plugins PDFDocument1 pageGitHub - NatronGitHub - Natron-Plugins - Natron Community Plugins PDFWibiPas encore d'évaluation
- HoloLens - PaperDocument7 pagesHoloLens - PaperAkshit GuptaPas encore d'évaluation
- CSE304 SyllabusDocument2 pagesCSE304 SyllabusBhavesh BansalPas encore d'évaluation
- Max Larner, Nabjot Sandhu, Mark Ortiz, Kathleen Chung, Chai Lor, Changqing LiDocument1 pageMax Larner, Nabjot Sandhu, Mark Ortiz, Kathleen Chung, Chai Lor, Changqing LivideoactivoPas encore d'évaluation
- The Visual Effects Production PipeLineDocument32 pagesThe Visual Effects Production PipeLinesanogkPas encore d'évaluation
- Computer Vision System Toolbox Getting Started GuideDocument68 pagesComputer Vision System Toolbox Getting Started GuideKjfsa TuPas encore d'évaluation
- Non-Mydriatic Auto Fundus Camera: Five Automated Functions For Enhanced Ease-of-UseDocument6 pagesNon-Mydriatic Auto Fundus Camera: Five Automated Functions For Enhanced Ease-of-UseJavier HernándezPas encore d'évaluation
- Airphoto 7Document33 pagesAirphoto 7AdPas encore d'évaluation
- Ccs352-Unit 4Document10 pagesCcs352-Unit 4Reshma RadhakrishnanPas encore d'évaluation
- Holographics Intl - No5Document36 pagesHolographics Intl - No5alkislemPas encore d'évaluation
- Power Director 13 - Tutorial Book - CyberlinkDocument326 pagesPower Director 13 - Tutorial Book - Cyberlinkmariosapereira100% (2)
- PHD Thesis Brian MayDocument6 pagesPHD Thesis Brian Mayjessicadeakinannarbor100% (2)
- Sirovision UgDocument59 pagesSirovision UgMilan LLanque Conde100% (1)
- Instant Download Trauma Contemporary Directions in Theory Practice and Research 1st Edition Ebook PDF PDF FREEDocument33 pagesInstant Download Trauma Contemporary Directions in Theory Practice and Research 1st Edition Ebook PDF PDF FREErichard.rosas835100% (41)
- 3D Stereo User GuideDocument51 pages3D Stereo User GuidefgoncalezPas encore d'évaluation
- Samsung Plasma TV ManualDocument29 pagesSamsung Plasma TV ManualWinner#1Pas encore d'évaluation
- The Planets: Photographs from the Archives of NASAD'EverandThe Planets: Photographs from the Archives of NASAÉvaluation : 4.5 sur 5 étoiles4.5/5 (3)
- The World Beneath: The Life and Times of Unknown Sea Creatures and Coral ReefsD'EverandThe World Beneath: The Life and Times of Unknown Sea Creatures and Coral ReefsÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
- Photographing Women: Posing, Lighting, and Shooting Techniques for Portrait and Fashion PhotographyD'EverandPhotographing Women: Posing, Lighting, and Shooting Techniques for Portrait and Fashion PhotographyÉvaluation : 4.5 sur 5 étoiles4.5/5 (7)
- Edward's Menagerie: Dogs: 50 canine crochet patternsD'EverandEdward's Menagerie: Dogs: 50 canine crochet patternsÉvaluation : 3 sur 5 étoiles3/5 (5)
- The Art of Photography: A Personal Approach to Artistic ExpressionD'EverandThe Art of Photography: A Personal Approach to Artistic ExpressionÉvaluation : 4.5 sur 5 étoiles4.5/5 (3)
- The Food Stylist's Handbook: Hundreds of Media Styling Tips, Tricks, and Secrets for Chefs, Artists, Bloggers, and Food LoversD'EverandThe Food Stylist's Handbook: Hundreds of Media Styling Tips, Tricks, and Secrets for Chefs, Artists, Bloggers, and Food LoversÉvaluation : 4 sur 5 étoiles4/5 (1)
- Rocks and Minerals of The World: Geology for Kids - Minerology and SedimentologyD'EverandRocks and Minerals of The World: Geology for Kids - Minerology and SedimentologyÉvaluation : 4.5 sur 5 étoiles4.5/5 (5)
- Dinosaurs: 101 Super Fun Facts And Amazing Pictures (Featuring The World's Top 16 Dinosaurs)D'EverandDinosaurs: 101 Super Fun Facts And Amazing Pictures (Featuring The World's Top 16 Dinosaurs)Évaluation : 4 sur 5 étoiles4/5 (6)
- The Photography Exercise Book: Training Your Eye to Shoot Like a Pro (250+ color photographs make it come to life)D'EverandThe Photography Exercise Book: Training Your Eye to Shoot Like a Pro (250+ color photographs make it come to life)Pas encore d'évaluation
- The Bare Bones Camera Course for Film and VideoD'EverandThe Bare Bones Camera Course for Film and VideoÉvaluation : 4 sur 5 étoiles4/5 (1)
- Patterns in Nature: Why the Natural World Looks the Way It DoesD'EverandPatterns in Nature: Why the Natural World Looks the Way It DoesÉvaluation : 4.5 sur 5 étoiles4.5/5 (11)
- LIFE The World's Most Haunted Places: Creepy, Ghostly, and Notorious SpotsD'EverandLIFE The World's Most Haunted Places: Creepy, Ghostly, and Notorious SpotsÉvaluation : 4.5 sur 5 étoiles4.5/5 (2)
- YouTube Growth Mastery: How to Start & Grow A Successful Youtube Channel. Get More Views, Subscribers, Hack The Algorithm, Make Money & Master YouTubeD'EverandYouTube Growth Mastery: How to Start & Grow A Successful Youtube Channel. Get More Views, Subscribers, Hack The Algorithm, Make Money & Master YouTubeÉvaluation : 3 sur 5 étoiles3/5 (3)
- Conscious Creativity: Look, Connect, CreateD'EverandConscious Creativity: Look, Connect, CreateÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
- Workin' It!: RuPaul's Guide to Life, Liberty, and the Pursuit of StyleD'EverandWorkin' It!: RuPaul's Guide to Life, Liberty, and the Pursuit of StyleÉvaluation : 4 sur 5 étoiles4/5 (73)
- Photography Express: Know How to Get into Photography and Become a Professional PhotographerD'EverandPhotography Express: Know How to Get into Photography and Become a Professional PhotographerPas encore d'évaluation
- Get Started in Digital Glamour Photography (Lingerie Edition)D'EverandGet Started in Digital Glamour Photography (Lingerie Edition)Évaluation : 2.5 sur 5 étoiles2.5/5 (5)