Vous aimerez peut-être aussi
- BlenderBasics 4thedition2011Document178 pagesBlenderBasics 4thedition2011Fernando Ortega100% (2)
- 10 1 1 14Document7 pages10 1 1 14lequanghungPas encore d'évaluation
- Minimum Guide Line in PhotogrammetricDocument114 pagesMinimum Guide Line in PhotogrammetricSentinel BergPas encore d'évaluation
- 02 Finite DifferencesDocument27 pages02 Finite DifferencesSentinel BergPas encore d'évaluation
- 1.3 Glade - 121106 PrintDocument46 pages1.3 Glade - 121106 PrintSentinel BergPas encore d'évaluation
- Blender Tutorials - Noob To ProDocument700 pagesBlender Tutorials - Noob To ProDades NugrohoPas encore d'évaluation
- Digital Image Processing: Minakshi KumarDocument22 pagesDigital Image Processing: Minakshi KumarNikhil SoniPas encore d'évaluation
- Towards Automatic Relative Orientation For Architectural PhotogrammetryDocument6 pagesTowards Automatic Relative Orientation For Architectural PhotogrammetrySentinel BergPas encore d'évaluation
- Automated Architecture Reconstruction From Close-Range PhotogrammetryDocument8 pagesAutomated Architecture Reconstruction From Close-Range PhotogrammetrySentinel BergPas encore d'évaluation
- What Is The Goal Stereo Vision?Document7 pagesWhat Is The Goal Stereo Vision?Sentinel BergPas encore d'évaluation
- Survey Manual Chap 7 Photogrammetric SurveysDocument14 pagesSurvey Manual Chap 7 Photogrammetric SurveysSentinel BergPas encore d'évaluation
- ZulkepliMajid2010 CameraConfigurationforAccurateCraniofacial PDFDocument12 pagesZulkepliMajid2010 CameraConfigurationforAccurateCraniofacial PDFSentinel BergPas encore d'évaluation
- U5LDocument8 pagesU5LSentinel BergPas encore d'évaluation
- Cartographic Generalization in A Digital Environment When and How To GeneralizeDocument12 pagesCartographic Generalization in A Digital Environment When and How To GeneralizeSentinel BergPas encore d'évaluation
- ReportDocument2 pagesReportSentinel BergPas encore d'évaluation
- Judy M. OlsonDocument7 pagesJudy M. OlsonSentinel BergPas encore d'évaluation
- 151Document74 pages151Sentinel BergPas encore d'évaluation
- Shuttle Radar Topography MissionDocument3 pagesShuttle Radar Topography MissionSentinel BergPas encore d'évaluation
- WGS84 G1674Document3 pagesWGS84 G1674Macario HernandezPas encore d'évaluation
- 3D Mapping Has ArrivedDocument2 pages3D Mapping Has ArrivedSentinel BergPas encore d'évaluation
- L TEX Title Template: John Smith University Name Department NameDocument1 pageL TEX Title Template: John Smith University Name Department NameSentinel BergPas encore d'évaluation
- Ransac PDFDocument2 pagesRansac PDFTrần TâmPas encore d'évaluation
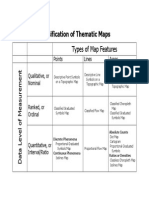
- Classification of Thematic Maps: Types of Map FeaturesDocument2 pagesClassification of Thematic Maps: Types of Map FeaturesSentinel BergPas encore d'évaluation
- Postgis Ver. 1.3.1 Quick Guide - Cheatsheet: PDF VersionDocument1 pagePostgis Ver. 1.3.1 Quick Guide - Cheatsheet: PDF VersionSentinel BergPas encore d'évaluation
- Radar GeometryDocument1 pageRadar GeometrySentinel BergPas encore d'évaluation
- CS6100: Topics in Design and Analysis of Algorithms: Delaunay Triangulation John AugustineDocument25 pagesCS6100: Topics in Design and Analysis of Algorithms: Delaunay Triangulation John AugustineSentinel BergPas encore d'évaluation
- BiblioDocument1 pageBiblioSentinel BergPas encore d'évaluation
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- The Complete Guide To Bird Photography - 41 TipsDocument40 pagesThe Complete Guide To Bird Photography - 41 TipsdhumplupukaPas encore d'évaluation
- 187: St. Illtyd's Church, Cefnpennar, Mountain AshDocument34 pages187: St. Illtyd's Church, Cefnpennar, Mountain AshAPAC LtdPas encore d'évaluation
- Hdk-55 Operation Us 01Document154 pagesHdk-55 Operation Us 01doddyPas encore d'évaluation
- Manual Sony A5000Document467 pagesManual Sony A5000CarlosPas encore d'évaluation
- Digital Photography: Workshop 1Document18 pagesDigital Photography: Workshop 1dphotoportsmouthPas encore d'évaluation
- Photography Dissertation ExamplesDocument4 pagesPhotography Dissertation ExamplesWhereCanIBuyResumePaperAkron100% (1)
- Corona Lecture1Document26 pagesCorona Lecture1Nana MagdyPas encore d'évaluation
- FD Lens Guide BookDocument48 pagesFD Lens Guide BookPaolo FasselliPas encore d'évaluation
- Polyscanner: Aerial HD Mapping SystemDocument2 pagesPolyscanner: Aerial HD Mapping SystemJimmy MontalvanPas encore d'évaluation
- Contextual Project - BlackberryDocument89 pagesContextual Project - BlackberryPalak ShivharePas encore d'évaluation
- How To Hold A Camera Harry Callahan S Early AbstractionsDocument18 pagesHow To Hold A Camera Harry Callahan S Early AbstractionsAngelaPas encore d'évaluation
- DH-IPC-HDBW5541E-ZE: 5MP Pro AI IR Vari-Focal Dome Network CameraDocument3 pagesDH-IPC-HDBW5541E-ZE: 5MP Pro AI IR Vari-Focal Dome Network CameraParvizPas encore d'évaluation
- CAPÍTULO 1 - Tidd - BessantDocument16 pagesCAPÍTULO 1 - Tidd - BessantCanal Produzindo100% (1)
- Manual Drone SJRC f11Document25 pagesManual Drone SJRC f11Rogério Lopes Da Costa56% (18)
- Flir t620 Datasheet PDFDocument2 pagesFlir t620 Datasheet PDFPuppy Ayu JatmikoPas encore d'évaluation
- Zeiss Ikon Catalogue 1936Document8 pagesZeiss Ikon Catalogue 1936JUAN MIGUELPas encore d'évaluation
- Western Star 4700 4800 4900 6900 Trucks Air & Electrical Systems PDFDocument28 pagesWestern Star 4700 4800 4900 6900 Trucks Air & Electrical Systems PDFRoland BlissettPas encore d'évaluation
- On Perfection & Affirmation in Street Photography: Mark DurdenDocument27 pagesOn Perfection & Affirmation in Street Photography: Mark DurdenAisha Islanders PérezPas encore d'évaluation
- Bryan Peterson's Exposure Solutions The Most Common Photography Problems and How To Solve Them - Bryan PetersonDocument300 pagesBryan Peterson's Exposure Solutions The Most Common Photography Problems and How To Solve Them - Bryan PetersonaretePas encore d'évaluation
- DH-IPC-HFW2230M-AS-LED-B: 2MP Lite Full-Color Fixed-Focal Bullet Network CameraDocument3 pagesDH-IPC-HFW2230M-AS-LED-B: 2MP Lite Full-Color Fixed-Focal Bullet Network CameraMEL ANGELESPas encore d'évaluation
- Brosura Microscop Operator Takagi OM-19Document2 pagesBrosura Microscop Operator Takagi OM-19Dana Andreea PopescuPas encore d'évaluation
- 10 Camera Settings: and Tips For Portrait PhotographyDocument32 pages10 Camera Settings: and Tips For Portrait Photographyasafoabe4065100% (1)
- Crmtcs 2 Compre ExamDocument7 pagesCrmtcs 2 Compre ExamChristopher Pjunatas75% (4)
- Mitchell, W.J.T. - Photographic EssayDocument45 pagesMitchell, W.J.T. - Photographic EssayAndy Andrei100% (3)
- Royce DE35-ST Operating InstructionsDocument120 pagesRoyce DE35-ST Operating InstructionsFerry JuliantoPas encore d'évaluation
- Samsung Galaxy Ace GT-S5830 User Manual (ENG)Document128 pagesSamsung Galaxy Ace GT-S5830 User Manual (ENG)Horváth Károly100% (1)
- Release NotesDocument19 pagesRelease Notesho ilPas encore d'évaluation
- 64 - MX4009&MX4016 MultiplexerDocument2 pages64 - MX4009&MX4016 MultiplexerAceel FitchPas encore d'évaluation
- Mapeh 10 Q3 Weeks 3 4Document50 pagesMapeh 10 Q3 Weeks 3 4Samad Recca T. Natividad100% (1)
- 70 Street Photography Tips For Beginners by Eric KimDocument44 pages70 Street Photography Tips For Beginners by Eric KimMariaBrincatPas encore d'évaluation