Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- WhatReallyisUHPC TowardsaGlobalDefinition UHPC2018FuzhouChina July292018Document14 pagesWhatReallyisUHPC TowardsaGlobalDefinition UHPC2018FuzhouChina July292018Данило ГадайчукPas encore d'évaluation
- CBSE Physics Lab Manual Part 6Document19 pagesCBSE Physics Lab Manual Part 6ArasuArunPas encore d'évaluation
- Moc3011 PDFDocument7 pagesMoc3011 PDFAlvaro Mompi RuizPas encore d'évaluation
- O Repensar Da Fonoaudiologia Na Epistemologia CienDocument5 pagesO Repensar Da Fonoaudiologia Na Epistemologia CienClaudilla L.Pas encore d'évaluation
- Anemometer ActivityDocument4 pagesAnemometer ActivityGab PerezPas encore d'évaluation
- The Evolution of Consciousness According to Bhagavad-GitaDocument14 pagesThe Evolution of Consciousness According to Bhagavad-Gitatrabajo mpdPas encore d'évaluation
- EE3008 Quiz 1Document5 pagesEE3008 Quiz 1Ricky Kwan Ki KwokPas encore d'évaluation
- Ch-27.2 Crystalline Materials - Detects in Crystalline MaterialsDocument102 pagesCh-27.2 Crystalline Materials - Detects in Crystalline MaterialsasjfgauojfgfPas encore d'évaluation
- Channel Tut v1Document11 pagesChannel Tut v1Umair IsmailPas encore d'évaluation
- IS 1570 Part 5Document18 pagesIS 1570 Part 5Sheetal JindalPas encore d'évaluation
- Edge Detection Algorithms ExplainedDocument17 pagesEdge Detection Algorithms ExplaineddgonlinePas encore d'évaluation
- Physical Computing NotesDocument2 pagesPhysical Computing NotesAnonymous W9MgRBVtYCPas encore d'évaluation
- 06 - 3D Embankment ConsolidationDocument28 pages06 - 3D Embankment ConsolidationRaynaldo JodistiroPas encore d'évaluation
- Experiment 1 (Equilibrium of Turning Forces)Document5 pagesExperiment 1 (Equilibrium of Turning Forces)shark eye100% (1)
- Quincy Qrds Series Single-Stage, Oil-Less Reciprocating Air Compressors 2-30 HPDocument8 pagesQuincy Qrds Series Single-Stage, Oil-Less Reciprocating Air Compressors 2-30 HPCoral IcmPas encore d'évaluation
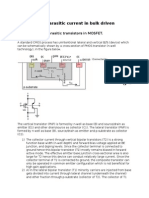
- Bulk Driven MosfetDocument3 pagesBulk Driven MosfetAyandev BarmanPas encore d'évaluation
- Datasheet G3516 1200 RPMDocument4 pagesDatasheet G3516 1200 RPMVerita SanjuánPas encore d'évaluation
- Chapter 6 - Cementing - Part 1 PDFDocument32 pagesChapter 6 - Cementing - Part 1 PDFfadz607Pas encore d'évaluation
- 09-The Synthesis and Analysis of AspirinDocument12 pages09-The Synthesis and Analysis of AspirinJeffrey Lee100% (2)
- KGT ManualDocument25 pagesKGT ManualLeo MoltoPas encore d'évaluation
- Cover PrintDocument4 pagesCover PrintFidel ArroyoPas encore d'évaluation
- Check Samsung indoor unit LED errorsDocument84 pagesCheck Samsung indoor unit LED errorsbluerosedtuPas encore d'évaluation
- The Consumption of Compressed Air: Applications and ComponentsDocument24 pagesThe Consumption of Compressed Air: Applications and Componentsibong tiriritPas encore d'évaluation
- Optimising Design and Power Management in Energy Efficient Marine Vessel Power SystemsDocument11 pagesOptimising Design and Power Management in Energy Efficient Marine Vessel Power SystemshamadiPas encore d'évaluation
- Programming ExercisesDocument2 pagesProgramming ExercisesDaryl Ivan Empuerto HisolaPas encore d'évaluation
- DEVELOPMENT AND TEST OF THE BO 105 RIGID ROTOR HELICOPTERDocument16 pagesDEVELOPMENT AND TEST OF THE BO 105 RIGID ROTOR HELICOPTERГригорий ОмельченкоPas encore d'évaluation
- Prepared By:: Ir - Ts.Dr. Renga Rao KrishnamoorthyDocument33 pagesPrepared By:: Ir - Ts.Dr. Renga Rao KrishnamoorthySyahir HamidonPas encore d'évaluation
- Fire Security NGOAFRDocument5 pagesFire Security NGOAFRseeker05Pas encore d'évaluation
- Assignment 4 PDFDocument2 pagesAssignment 4 PDFAhmed Attalla100% (1)
- Flight Without Formulae 158p PDFDocument158 pagesFlight Without Formulae 158p PDFvvb_frndPas encore d'évaluation