Vous aimerez peut-être aussi
- Introduction to 6800/6802 Microprocessor Systems: Hardware, Software and ExperimentationD'EverandIntroduction to 6800/6802 Microprocessor Systems: Hardware, Software and ExperimentationPas encore d'évaluation
- 8085Document47 pages8085Govind GuptaPas encore d'évaluation
- First Term Assignment CSC 471 Summer-2018: Rihab Rahman, 16103327, CSC 471, Sec-F, MAHDocument40 pagesFirst Term Assignment CSC 471 Summer-2018: Rihab Rahman, 16103327, CSC 471, Sec-F, MAHAbdur RazzakPas encore d'évaluation
- BE-II/IV-Sem-IV Computer Organization Lab Viva Questions With Answers-Osmania UniversityDocument15 pagesBE-II/IV-Sem-IV Computer Organization Lab Viva Questions With Answers-Osmania UniversitySirisha VamsiPas encore d'évaluation
- 8085Document56 pages8085Kunal MeherPas encore d'évaluation
- Microprocessors and Microcontrollers Module 1 - 5Document260 pagesMicroprocessors and Microcontrollers Module 1 - 5ncecentral0% (1)
- EE6502 MPMC UNIT 1-5 (Read-Only)Document607 pagesEE6502 MPMC UNIT 1-5 (Read-Only)Rajasekaran ThangarajuPas encore d'évaluation
- C5 - Intro To 8085 - Hardware PDFDocument39 pagesC5 - Intro To 8085 - Hardware PDFsiti hajarPas encore d'évaluation
- 8255 NewDocument13 pages8255 Newmohit mishraPas encore d'évaluation
- Instruction Set of 8085Document43 pagesInstruction Set of 8085Abdul YaseenPas encore d'évaluation
- Unit-4 Assembly Language Basics Microprocessor & Interfacing - 3160712Document155 pagesUnit-4 Assembly Language Basics Microprocessor & Interfacing - 3160712Its MePas encore d'évaluation
- Introduction To 8085 Microprocessor - Dr.P.YogeshDocument48 pagesIntroduction To 8085 Microprocessor - Dr.P.Yogeshmailmeasdd100% (1)
- Microprocessor8085 BestDocument145 pagesMicroprocessor8085 BestDebashis TaraiPas encore d'évaluation
- Tesis ABC - DQ0Document101 pagesTesis ABC - DQ0laloPas encore d'évaluation
- Ece I Basic Electronics Engg. (15eln15) NotesDocument124 pagesEce I Basic Electronics Engg. (15eln15) NotesNikhil KulkarniPas encore d'évaluation
- Class 2-Introduction To 8085 Microprocessor PDFDocument46 pagesClass 2-Introduction To 8085 Microprocessor PDFDeepika AgrawalPas encore d'évaluation
- Zoology Full PDF EMDocument108 pagesZoology Full PDF EMSmiruthi RavichandranPas encore d'évaluation
- Physical Short Notes - WatermarkedDocument175 pagesPhysical Short Notes - Watermarkedryzengfx6Pas encore d'évaluation
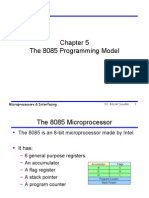
- The 8085 Programming ModelDocument13 pagesThe 8085 Programming Modelapi-3850688100% (5)
- Block Diagram of 8085Document32 pagesBlock Diagram of 8085Shabd ShashankPas encore d'évaluation
- Experiments On 8085 MicroprocessorDocument18 pagesExperiments On 8085 MicroprocessorSaumya Mohan100% (1)
- M11 8085 ProgrammingDocument136 pagesM11 8085 ProgrammingPavan Deep100% (2)
- Power Electronicsall Five UnitDocument432 pagesPower Electronicsall Five Unitdj9017354100% (1)
- Presented by C.Gokul, Ap/Eee: Departments: Cse, It, Ece, Ece, Mech Regulation: 2013Document633 pagesPresented by C.Gokul, Ap/Eee: Departments: Cse, It, Ece, Ece, Mech Regulation: 2013SATHEESHPas encore d'évaluation
- 8085 Instruction SetDocument27 pages8085 Instruction Setbostanci100% (1)
- 8085 Instruction Addressing Modes ImppDocument87 pages8085 Instruction Addressing Modes ImppRohan VaidyaPas encore d'évaluation
- Microprocessor Question BankDocument3 pagesMicroprocessor Question Bankstudy knowledge sumanjayPas encore d'évaluation
- DLF Microprocessor 02 2017 18Document72 pagesDLF Microprocessor 02 2017 18ARSALAAN HUSSAIN100% (1)
- Cs1304 Q&A MWDocument35 pagesCs1304 Q&A MWksrajasekarPas encore d'évaluation
- Unit-3 8085 MicroprocessorDocument101 pagesUnit-3 8085 MicroprocessorDonika MarkandePas encore d'évaluation
- Timing Diagram 8085 FinalDocument29 pagesTiming Diagram 8085 FinalgokulchandruPas encore d'évaluation
- Ece 8085 MicroprocessorDocument26 pagesEce 8085 Microprocessorgourav VermaPas encore d'évaluation
- EE222 Lecture 13-24 8051 MicrocontrollerDocument94 pagesEE222 Lecture 13-24 8051 MicrocontrollerSalman HadiPas encore d'évaluation
- Motor m49sp 1 eDocument2 pagesMotor m49sp 1 eRené Isaac Martínez OlivaPas encore d'évaluation
- 8051 Microcontroller Basics by Er. Swapnil V. KawareDocument39 pages8051 Microcontroller Basics by Er. Swapnil V. KawareswapnilPas encore d'évaluation
- 8051 PPTDocument30 pages8051 PPTBhaskarReddyVangalaPas encore d'évaluation
- Unit-1 8085Document299 pagesUnit-1 8085sujithPas encore d'évaluation
- Fundamentals of Power Electronics - CompressedDocument341 pagesFundamentals of Power Electronics - Compressedghatiyashivani48Pas encore d'évaluation
- Chapter 4 Programmable Peripheral InterfaceDocument49 pagesChapter 4 Programmable Peripheral InterfacetesfayebbPas encore d'évaluation
- 8051 PPT For MSCDocument151 pages8051 PPT For MSCHARISH M 19MTR024Pas encore d'évaluation
- Power ElectronicsDocument450 pagesPower ElectronicsBibin K Padur0% (1)
- ABC DQ TransformationDocument2 pagesABC DQ TransformationRoop Kapur0% (1)
- 8051 PPT For MSCDocument138 pages8051 PPT For MSCvikash sharmaPas encore d'évaluation
- 8085 Lab ManualDocument58 pages8085 Lab ManualShah JainamPas encore d'évaluation
- Microprocessor 8085Document341 pagesMicroprocessor 8085nikhil singhPas encore d'évaluation
- Microcontroller and Embedded SystemsDocument2 pagesMicrocontroller and Embedded SystemsIndranilPas encore d'évaluation
- Assemblylanguageprogrammingof8085 100523023329 Phpapp02Document52 pagesAssemblylanguageprogrammingof8085 100523023329 Phpapp02Napoleon LygdasPas encore d'évaluation
- Microprocessor Lab Manual - FinalDocument157 pagesMicroprocessor Lab Manual - FinalDr. N.Shanmugasundaram100% (6)
- MCDocument59 pagesMCPavankumar KalliPas encore d'évaluation
- KeltronDocument47 pagesKeltronAnika VarkeyPas encore d'évaluation
- 8085 Microprocessor ArchitectureDocument46 pages8085 Microprocessor ArchitectureJuhil H Patel100% (1)
- Microprocessors & Its Applications CSM-3305 PDFDocument255 pagesMicroprocessors & Its Applications CSM-3305 PDFromesh1998Pas encore d'évaluation
- WINSEM2022-23 BECE204L TH VL2022230500867 Reference Material I 07-12-2022 B.techPresentation3Document30 pagesWINSEM2022-23 BECE204L TH VL2022230500867 Reference Material I 07-12-2022 B.techPresentation3Siyam NameshPas encore d'évaluation
- Mpi Bece1 517Document50 pagesMpi Bece1 517johnpaulshobayanPas encore d'évaluation
- CS Paper 2 Notes Modify 2020Document106 pagesCS Paper 2 Notes Modify 2020hermoine gawarPas encore d'évaluation
- Microprocessor FINALDocument8 pagesMicroprocessor FINALbocemay268Pas encore d'évaluation
- Unit - I: Department of Ece 1Document11 pagesUnit - I: Department of Ece 1Su YeePas encore d'évaluation
- Evolution of MicroprocessorsDocument22 pagesEvolution of MicroprocessorsGoutham KrishPas encore d'évaluation
- Presentation On History of MicroprocessorsDocument11 pagesPresentation On History of MicroprocessorsY_ShiraskarPas encore d'évaluation
- Jurnal PEMELIHARAAN IKAN BAUNG (Hemibagrus Nemurus) DENGAN Padat Tebar Yang Berbeda Pada Sistem Budidaya BosterDocument14 pagesJurnal PEMELIHARAAN IKAN BAUNG (Hemibagrus Nemurus) DENGAN Padat Tebar Yang Berbeda Pada Sistem Budidaya Bosterdesi sukmawatiPas encore d'évaluation
- Heat TransgerDocument56 pagesHeat TransgerShusha Shomali67% (3)
- Buddhism in AndhraDocument16 pagesBuddhism in AndhraRaghavendrarao ChukkaPas encore d'évaluation
- Sorting - Problem Solving With Algorithms and Data StructuresDocument30 pagesSorting - Problem Solving With Algorithms and Data Structuressatya1401Pas encore d'évaluation
- The Eight Types of Interview QuestionsDocument2 pagesThe Eight Types of Interview QuestionsKayla Camille A. Miguel100% (1)
- Nei Nastran in Cad 2011 BrochureDocument8 pagesNei Nastran in Cad 2011 Brochurexuanphuong2710Pas encore d'évaluation
- Mathematical Statistics and Data Analysis 3rd Edition - Chapter8 Solutions PDFDocument54 pagesMathematical Statistics and Data Analysis 3rd Edition - Chapter8 Solutions PDFnewpersia81% (32)
- 2 Digit Token Display System ReportDocument9 pages2 Digit Token Display System Reportdeardestiny100% (1)
- Seminar FormatDocument6 pagesSeminar Formatupasana joliaPas encore d'évaluation
- AbsenteeismsmawfinalDocument13 pagesAbsenteeismsmawfinalJohn Ray VelascoPas encore d'évaluation
- Portable Centre Pivot Irrigation System With Advanced Control Through Sensors A ReviewDocument4 pagesPortable Centre Pivot Irrigation System With Advanced Control Through Sensors A ReviewEditor IJTSRDPas encore d'évaluation
- 2-General Physics 1-Uncertainties in MeasurementDocument22 pages2-General Physics 1-Uncertainties in MeasurementLiza Macalinao MangalimanPas encore d'évaluation
- SNC1D - ASSIGNMENT - Applications of Static Electricity - F2018Document2 pagesSNC1D - ASSIGNMENT - Applications of Static Electricity - F2018adsfasdf asdfsadfsdafPas encore d'évaluation
- More More SymcliDocument10 pagesMore More SymcliSrinivas Gollanapalli100% (1)
- Accelerated C++Document13 pagesAccelerated C++gokuler137Pas encore d'évaluation
- WMA11 01 Que 20190109Document28 pagesWMA11 01 Que 20190109tassu67% (3)
- Listening and Speaking ActivitiesDocument41 pagesListening and Speaking Activitiesdaroksay50% (2)
- REHABILITATION of Marine StructuresDocument98 pagesREHABILITATION of Marine StructuresBalan-Nogi Dan100% (1)
- MLA Short GuideDocument2 pagesMLA Short GuidekennethreedsPas encore d'évaluation
- Correlation & RegressionDocument26 pagesCorrelation & Regressionabhilashaupadhyaya100% (1)
- B1 Writing Task Analytic RubricDocument1 pageB1 Writing Task Analytic RubricsecilerkollPas encore d'évaluation
- TM11-5855-213-23&P - AN-PVS4 - UNIT AND DIRECT SUPPORT MAINTENANCE MANUAL - 1 - June - 1993Document110 pagesTM11-5855-213-23&P - AN-PVS4 - UNIT AND DIRECT SUPPORT MAINTENANCE MANUAL - 1 - June - 1993hodhodhodsribd100% (1)
- V10 - Key (Checked & Apd by Graham)Document4 pagesV10 - Key (Checked & Apd by Graham)HưởngPas encore d'évaluation
- Needs Analysis Planning A Syllabus For A PDFDocument17 pagesNeeds Analysis Planning A Syllabus For A PDFEliana SotoPas encore d'évaluation
- Global Major Incidents List 1902-2009Document56 pagesGlobal Major Incidents List 1902-2009utopianzherePas encore d'évaluation
- A Survey of Cross-Infection Control Procedures: Knowledge and Attitudes of Turkish DentistsDocument5 pagesA Survey of Cross-Infection Control Procedures: Knowledge and Attitudes of Turkish Dentistsbie2xPas encore d'évaluation
- KitkatDocument11 pagesKitkatSugandha GuptaPas encore d'évaluation
- OCOM FTA ReviewerDocument5 pagesOCOM FTA ReviewerJulluis DagoPas encore d'évaluation
- Functional Specification05830264312 PDFDocument96 pagesFunctional Specification05830264312 PDFEleonoraPas encore d'évaluation
- Hospital Management ProjectDocument6 pagesHospital Management ProjectawaisPas encore d'évaluation