Vous aimerez peut-être aussi
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Openmtc: M2M Solutions For Smart Cities and The Internet of ThingsDocument7 pagesOpenmtc: M2M Solutions For Smart Cities and The Internet of Thingsgame___overPas encore d'évaluation
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Checkpoint Services: Application Program InterfaceDocument17 pagesCheckpoint Services: Application Program Interfacegame___overPas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- NS3 TutorialDocument46 pagesNS3 TutorialahmedabdullaPas encore d'évaluation
- 140 MHZ Bandpass Filter 19.4 MHZ Bandwidth Sf0140Cf1Xxxxt: Part NumberDocument2 pages140 MHZ Bandpass Filter 19.4 MHZ Bandwidth Sf0140Cf1Xxxxt: Part Numbergame___overPas encore d'évaluation
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Maam Ss 0017Document3 pagesMaam Ss 0017game___overPas encore d'évaluation
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- 05 Challenges of LTE Advance Rel10 13Document75 pages05 Challenges of LTE Advance Rel10 13game___overPas encore d'évaluation
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Specification: 1. HousingDocument2 pagesSpecification: 1. Housinggame___overPas encore d'évaluation
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- J LCB140S 20A: Top View Bottom ViewDocument2 pagesJ LCB140S 20A: Top View Bottom Viewgame___overPas encore d'évaluation
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
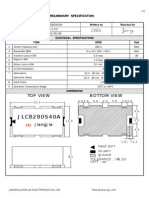
- J LCB280S 40A: Top View Bottom ViewDocument2 pagesJ LCB280S 40A: Top View Bottom Viewgame___overPas encore d'évaluation
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- J Lcl70A: Top View Bottom ViewDocument2 pagesJ Lcl70A: Top View Bottom Viewgame___overPas encore d'évaluation
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- AD780Document10 pagesAD780game___overPas encore d'évaluation
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- AH1Document6 pagesAH1game___overPas encore d'évaluation
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- Gaas Ic 5 Bit Digital Attenuator 1 DB LSB Positive Control 0.5-2.5 GHZDocument5 pagesGaas Ic 5 Bit Digital Attenuator 1 DB LSB Positive Control 0.5-2.5 GHZgame___overPas encore d'évaluation
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- Removal High Density Salt and Pepper Noise in Quick Transient or Faulty Switching ImagesDocument5 pagesRemoval High Density Salt and Pepper Noise in Quick Transient or Faulty Switching ImagesA Agnel MelPas encore d'évaluation
- Gibb's Phenomenon Analysis On FIR Filter Using Window TechniquesDocument5 pagesGibb's Phenomenon Analysis On FIR Filter Using Window TechniquesijaertPas encore d'évaluation
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- DSP Lab Record Exp-1Document19 pagesDSP Lab Record Exp-1Prabhu ChPas encore d'évaluation
- Digital FiltersDocument50 pagesDigital FiltersJosePas encore d'évaluation
- FE Ele CBT Specs With RangesDocument3 pagesFE Ele CBT Specs With RangesmedjacPas encore d'évaluation
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- Tms320c6713 User ManualDocument60 pagesTms320c6713 User ManualJagannath Vishnuteja Desai100% (1)
- Questions & Answers On Discrete Time Systems ImplementationDocument38 pagesQuestions & Answers On Discrete Time Systems Implementationkibrom atsbha0% (1)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- U Cân Vishay VT220Document84 pagesU Cân Vishay VT220svetlanaPas encore d'évaluation
- DSP Question Paper Unit 1Document10 pagesDSP Question Paper Unit 1shankarPas encore d'évaluation
- DTR8510 enDocument64 pagesDTR8510 enJorge Michela ScarlazettaPas encore d'évaluation
- HFD Manual V2Document34 pagesHFD Manual V2BouzidPas encore d'évaluation
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Design of FIR Filter Using Distributed Arithmetic ArchitectureDocument3 pagesDesign of FIR Filter Using Distributed Arithmetic ArchitectureEditor IJRITCCPas encore d'évaluation
- Audio Signal Processing Using MATLABDocument30 pagesAudio Signal Processing Using MATLABরজতশুভ্র করPas encore d'évaluation
- Filter Design For Dspic DSC Digital Filter Design and Analysis SystemDocument82 pagesFilter Design For Dspic DSC Digital Filter Design and Analysis SystemGavMogyPas encore d'évaluation
- DSP Processors and ArchitecturesDocument1 pageDSP Processors and ArchitecturesK S RajasekharPas encore d'évaluation
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- DTMF GenDocument22 pagesDTMF GenMohammad R AssafPas encore d'évaluation
- EVM-1702 Evaluation Module: Features DescriptionDocument13 pagesEVM-1702 Evaluation Module: Features DescriptionNos Dac DiyPas encore d'évaluation
- Application of Acoustic Echo CancellationDocument81 pagesApplication of Acoustic Echo CancellationTridev Padhi100% (1)
- DSP and FiltersDocument66 pagesDSP and FiltersShalin Doshi100% (1)
- Fir FilterDocument10 pagesFir FilterAravind RameshPas encore d'évaluation
- Substation Commissioning 1Document66 pagesSubstation Commissioning 1TejaRam Augusthya0% (1)
- Ec2306 Digital Signal Processing Lab Manual For TMS320C6745Document52 pagesEc2306 Digital Signal Processing Lab Manual For TMS320C6745Partho RanaPas encore d'évaluation
- Design and Verification of FIR Filter Using Pipelined Distributed Arithmetic 2019-20Document7 pagesDesign and Verification of FIR Filter Using Pipelined Distributed Arithmetic 2019-20Rekha TotadPas encore d'évaluation
- A Course in Advanced Signal ProcessingDocument16 pagesA Course in Advanced Signal ProcessingSolo NunooPas encore d'évaluation
- Dr. Mahalingam College of Engineering and Technology, Pollachi - 642 003 Department of Electrical and Electronics EngineeringDocument7 pagesDr. Mahalingam College of Engineering and Technology, Pollachi - 642 003 Department of Electrical and Electronics EngineeringDiwakar GautamPas encore d'évaluation
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- FBDocument3 pagesFBJohn matthewPas encore d'évaluation
- C Algorithm For Real-Time DSP PDFDocument125 pagesC Algorithm For Real-Time DSP PDFdhananjayan89100% (5)
- Manual 19032012Document33 pagesManual 19032012Hirankur KhillarePas encore d'évaluation
- Assignment For B.Tech ECE: X N X KDocument3 pagesAssignment For B.Tech ECE: X N X KTanmay GoelPas encore d'évaluation