Vous aimerez peut-être aussi
- Path Tracking For A Miniature RobotDocument9 pagesPath Tracking For A Miniature RobotDarshan Rai KanungoPas encore d'évaluation
- A Path Planning Technique For Autonomous Mobile Robot Using Free-Configuration EigenspacesDocument15 pagesA Path Planning Technique For Autonomous Mobile Robot Using Free-Configuration EigenspacesAI Coordinator - CSC JournalsPas encore d'évaluation
- Robot Localization Using Relative and Absolute Position EstimatesDocument7 pagesRobot Localization Using Relative and Absolute Position Estimatesengineer86Pas encore d'évaluation
- I Jcs It 2014050405Document4 pagesI Jcs It 2014050405Salah AddinPas encore d'évaluation
- Vision Based Lane Detection For Unmanned Ground Vehicle (UGV)Document19 pagesVision Based Lane Detection For Unmanned Ground Vehicle (UGV)AjayPas encore d'évaluation
- A New Nonlinear Guidance Logic For Trajectory Tracking PDFDocument16 pagesA New Nonlinear Guidance Logic For Trajectory Tracking PDFЋирка ФејзбуџаркаPas encore d'évaluation
- Real-time Tracking and Pose Estimation for Industrial Objects using Geometric FeaturesDocument6 pagesReal-time Tracking and Pose Estimation for Industrial Objects using Geometric FeaturesHaydee Tu Ya SabesPas encore d'évaluation
- Feature-Based Laser Scan Matching for Accurate Mobile Robot LocalizationDocument6 pagesFeature-Based Laser Scan Matching for Accurate Mobile Robot LocalizationhenrydclPas encore d'évaluation
- Petrovskaya 2008 ISERDocument13 pagesPetrovskaya 2008 ISERNguyen Quoc DoanPas encore d'évaluation
- Path Planning Using Dynamic Vehicle Model: NavigationDocument6 pagesPath Planning Using Dynamic Vehicle Model: NavigationMorpheus_spPas encore d'évaluation
- Priority Scheduling Based Dynamic Path Planning System With Motion FeedbackDocument5 pagesPriority Scheduling Based Dynamic Path Planning System With Motion FeedbackIamIam If IamNotPas encore d'évaluation
- Implementation of The Adaptive Pure Pursuit Controller: Team 1712Document19 pagesImplementation of The Adaptive Pure Pursuit Controller: Team 1712Chris P. BaconPas encore d'évaluation
- Richter 2016Document18 pagesRichter 2016Dedy BehiPas encore d'évaluation
- Digital Image Processing Project ReportDocument11 pagesDigital Image Processing Project ReportPrachi GargPas encore d'évaluation
- Research Article: Real-Time Vehicle Detection Using Cross-Correlation and 2D-DWT For Feature ExtractionDocument10 pagesResearch Article: Real-Time Vehicle Detection Using Cross-Correlation and 2D-DWT For Feature ExtractionazedPas encore d'évaluation
- Proceedings of The 9th WSEAS International Conference On APPLICATIONS of ELECTRICAL ENGINEERINGDocument7 pagesProceedings of The 9th WSEAS International Conference On APPLICATIONS of ELECTRICAL ENGINEERINGIbrahim SadohPas encore d'évaluation
- Tan Et Al 2006Document13 pagesTan Et Al 2006Aparupa DasguptaPas encore d'évaluation
- Design and Implementation of The Pedestrian Information Analysis SystemDocument7 pagesDesign and Implementation of The Pedestrian Information Analysis SystemAnkit AnandPas encore d'évaluation
- Obstacle Detection Using Hough Transform: Elated WorkDocument4 pagesObstacle Detection Using Hough Transform: Elated WorkFloyd ClarkePas encore d'évaluation
- Vehicle Speed Detection in Video Image Sequences Using CVS MethodDocument9 pagesVehicle Speed Detection in Video Image Sequences Using CVS MethodrevathyirsPas encore d'évaluation
- A Calibration Procedure For The Parallel Robot Delta 4: P. Maurine, E. DombreDocument6 pagesA Calibration Procedure For The Parallel Robot Delta 4: P. Maurine, E. DombreHoracio GeorgePas encore d'évaluation
- Batch - 4 Mini ProjectDocument24 pagesBatch - 4 Mini ProjectSai KiranPas encore d'évaluation
- Methodology For Kinematics Modeling of Articulated Rovers, Enhanced With Fuzzy Logic SystemDocument6 pagesMethodology For Kinematics Modeling of Articulated Rovers, Enhanced With Fuzzy Logic SystemmaxamaxaPas encore d'évaluation
- An Optimized Segmentation Method For A 2D Laser-Scanner Applied To Mobile Robot NavigationDocument6 pagesAn Optimized Segmentation Method For A 2D Laser-Scanner Applied To Mobile Robot NavigationKhaled Hossam EmamPas encore d'évaluation
- Imtc RobotNavigation 7594Document5 pagesImtc RobotNavigation 7594flv_91Pas encore d'évaluation
- Vehicles 04 00055Document30 pagesVehicles 04 00055karim SabryPas encore d'évaluation
- Distance Determination Using OpencvDocument6 pagesDistance Determination Using OpencvMahmoud AhmedPas encore d'évaluation
- IEEE TRANSACTIONS ON ROBOTICS AND AUTOMATION, VOL. 7 , NO. 2, APRIL I991Document12 pagesIEEE TRANSACTIONS ON ROBOTICS AND AUTOMATION, VOL. 7 , NO. 2, APRIL I991maysamshPas encore d'évaluation
- ECE 533 Course Project: Vision-Based Lane Detection Using Hough TransformDocument12 pagesECE 533 Course Project: Vision-Based Lane Detection Using Hough TransformpravinPas encore d'évaluation
- Richter ISRR13Document16 pagesRichter ISRR13AmanPas encore d'évaluation
- Multi-Rate Path Following ControlDocument6 pagesMulti-Rate Path Following ControlBinhMinh NguyenPas encore d'évaluation
- 1I11-IJAET1111203 Novel 3dDocument12 pages1I11-IJAET1111203 Novel 3dIJAET JournalPas encore d'évaluation
- Autonomous Vehicle Parking Using Artificial Intelligent ApproachDocument6 pagesAutonomous Vehicle Parking Using Artificial Intelligent ApproachmihaipaulescuPas encore d'évaluation
- 17bee0041 VL2020210101488 Pe003 PDFDocument13 pages17bee0041 VL2020210101488 Pe003 PDFSPARSH RAJPas encore d'évaluation
- Model-Based: Lane RecognitionDocument6 pagesModel-Based: Lane RecognitionTriệu NguyễnPas encore d'évaluation
- Experiment #9:: ApparatusDocument4 pagesExperiment #9:: ApparatusThomas mortonPas encore d'évaluation
- Automatic Unguided VehicleDocument8 pagesAutomatic Unguided VehiclevasubatraPas encore d'évaluation
- Optimal Design Methodology For An AGV Transportation System by Using The Queuing Network TheoryDocument10 pagesOptimal Design Methodology For An AGV Transportation System by Using The Queuing Network TheorybhumijayaPas encore d'évaluation
- Tracking Oncoming and Turning Vehicles at Intersections: Alexander Barth and Uwe FrankeDocument8 pagesTracking Oncoming and Turning Vehicles at Intersections: Alexander Barth and Uwe Frankeshisasane2Pas encore d'évaluation
- Mobile Robot Navigation Using Visual OdometryDocument6 pagesMobile Robot Navigation Using Visual OdometryEbit Nur AlfianPas encore d'évaluation
- Applying The Particle Filter and Classifier To Front Vehicle Detection and TrackingDocument7 pagesApplying The Particle Filter and Classifier To Front Vehicle Detection and TrackingInternational Journal of Application or Innovation in Engineering & ManagementPas encore d'évaluation
- Tracking Control For Quad-Rotor Using Velocity Fie PDFDocument18 pagesTracking Control For Quad-Rotor Using Velocity Fie PDFw_23Pas encore d'évaluation
- RobotsDocument6 pagesRobotsKomal VernekarPas encore d'évaluation
- Icas 2011 5 40 20078 PDFDocument5 pagesIcas 2011 5 40 20078 PDFKetan RsPas encore d'évaluation
- 08 Robotics F16MTE Path and Trajectory PlanningDocument21 pages08 Robotics F16MTE Path and Trajectory PlanningasadPas encore d'évaluation
- Distance Determination For An Automobile Environment Using Inverse Perspective Mapping in OpenCVDocument6 pagesDistance Determination For An Automobile Environment Using Inverse Perspective Mapping in OpenCVCristian StrebaPas encore d'évaluation
- Fuzzy Supervisory Path Tracking of Mobile Robots 1Document7 pagesFuzzy Supervisory Path Tracking of Mobile Robots 1Thanh BaoPas encore d'évaluation
- Fuzzy Logic of Speed and Steering Control System For Three Dimensional Line Following of An Autonomous VehicleDocument8 pagesFuzzy Logic of Speed and Steering Control System For Three Dimensional Line Following of An Autonomous Vehiclealeena_bcPas encore d'évaluation
- Analyzing and Mapping of Traffic Spots in City Transportation Using Android ApplicationDocument18 pagesAnalyzing and Mapping of Traffic Spots in City Transportation Using Android Applicationppjadhav920Pas encore d'évaluation
- Autonomous Robot Motion Path Planning Using Shortest Path Planning AlgorithmsDocument5 pagesAutonomous Robot Motion Path Planning Using Shortest Path Planning AlgorithmsIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalPas encore d'évaluation
- 5-DOF Manipulator Simulation Based On MATLAB Simulink MethodologyDocument6 pages5-DOF Manipulator Simulation Based On MATLAB Simulink MethodologyCh RajaPas encore d'évaluation
- Full Text 01Document7 pagesFull Text 01Voskula ShivakrishnaPas encore d'évaluation
- Spline Path Following For Redundant Mechanical SystemsDocument15 pagesSpline Path Following For Redundant Mechanical SystemsMohammedPas encore d'évaluation
- Exact Cell Decomposition of Arrangements Used For Path Planning in RoboticsDocument14 pagesExact Cell Decomposition of Arrangements Used For Path Planning in RoboticsAli BabarPas encore d'évaluation
- Traffic Light Detection for Autonomous VehiclesDocument8 pagesTraffic Light Detection for Autonomous VehiclesGuang ChenPas encore d'évaluation
- Reference Notes2 27Document8 pagesReference Notes2 27Pratima SinghPas encore d'évaluation
- RealTime OnRoad Vehicle Detection With Optical Flows and HaarLike Feature DetectorDocument7 pagesRealTime OnRoad Vehicle Detection With Optical Flows and HaarLike Feature DetectormauriziopezPas encore d'évaluation
- Planar Linkage Synthesis: A modern CAD based approachD'EverandPlanar Linkage Synthesis: A modern CAD based approachPas encore d'évaluation
- Assignment 5Document1 pageAssignment 5teju1996coolPas encore d'évaluation
- Assignment 4Document2 pagesAssignment 4teju1996coolPas encore d'évaluation
- Fundamental groups of topological spaces and properties of covering spacesDocument2 pagesFundamental groups of topological spaces and properties of covering spacesteju1996coolPas encore d'évaluation
- Conservation Law Ma515 2017Document6 pagesConservation Law Ma515 2017teju1996coolPas encore d'évaluation
- The Nonlinear Dynamics of Electrostatically-Actuated, Single-Walled Carbon Nanotube ResonatorsDocument12 pagesThe Nonlinear Dynamics of Electrostatically-Actuated, Single-Walled Carbon Nanotube Resonatorsteju1996coolPas encore d'évaluation
- 14D100020 - 1Document2 pages14D100020 - 1teju1996coolPas encore d'évaluation
- AchievementsDocument2 pagesAchievementsteju1996coolPas encore d'évaluation
- Multi-Marginal Optimal Transport: Theory and ApplicationsDocument29 pagesMulti-Marginal Optimal Transport: Theory and Applicationsteju1996coolPas encore d'évaluation
- 14D100020 - 1Document2 pages14D100020 - 1teju1996coolPas encore d'évaluation
- MA533 Assignment 1 SolutionsDocument2 pagesMA533 Assignment 1 Solutionsteju1996coolPas encore d'évaluation
- Minor Homepage DocumentDocument2 pagesMinor Homepage Documentteju1996coolPas encore d'évaluation
- Assignment 2Document1 pageAssignment 2teju1996coolPas encore d'évaluation
- 14D100020 - 1Document2 pages14D100020 - 1teju1996coolPas encore d'évaluation
- NL 200950 DDocument5 pagesNL 200950 Dteju1996coolPas encore d'évaluation
- PhysRevE 86 046208Document7 pagesPhysRevE 86 046208teju1996coolPas encore d'évaluation
- Anomalous Dissipation in Single-Walled Carbon Nanotube ResonatorsDocument5 pagesAnomalous Dissipation in Single-Walled Carbon Nanotube Resonatorsteju1996coolPas encore d'évaluation
- Nano9 3 035702Document7 pagesNano9 3 035702teju1996coolPas encore d'évaluation
- 14D100020 - 0Document1 page14D100020 - 0teju1996coolPas encore d'évaluation
- Theoretical Development and Closed-Form Solution of Nonlinear Vibrations of A Directly Excited Nanotube-Reinforced Composite Cantilevered BeamDocument11 pagesTheoretical Development and Closed-Form Solution of Nonlinear Vibrations of A Directly Excited Nanotube-Reinforced Composite Cantilevered Beamteju1996coolPas encore d'évaluation
- Nonlinear and Nonplanar Dynamics of Suspended Nanotube and Nanowire ResonatorsDocument6 pagesNonlinear and Nonplanar Dynamics of Suspended Nanotube and Nanowire Resonatorsteju1996coolPas encore d'évaluation
- Nonlinear and Nonplanar Dynamics of Suspended Nanotube and Nanowire ResonatorsDocument6 pagesNonlinear and Nonplanar Dynamics of Suspended Nanotube and Nanowire Resonatorsteju1996coolPas encore d'évaluation
- WCE2013 pp1640-1645Document6 pagesWCE2013 pp1640-1645teju1996coolPas encore d'évaluation
- RM 8Document109 pagesRM 8teju1996coolPas encore d'évaluation
- 1602 00508v1Document6 pages1602 00508v1teju1996coolPas encore d'évaluation
- Coupling Between Flexural Modes in Free Vibration of Single-Walled Carbon NanotubesDocument10 pagesCoupling Between Flexural Modes in Free Vibration of Single-Walled Carbon Nanotubesteju1996coolPas encore d'évaluation
- An Experimental Investigation of Nonlinear Vibration and Frequency Response Analysis of Cantilever Viscoelastic BeamsDocument11 pagesAn Experimental Investigation of Nonlinear Vibration and Frequency Response Analysis of Cantilever Viscoelastic BeamsRotPas encore d'évaluation
- Effects of DC voltage on initiation of whirling motion in nanowire oscillatorsDocument30 pagesEffects of DC voltage on initiation of whirling motion in nanowire oscillatorsteju1996coolPas encore d'évaluation
- Series ExpansionDocument2 pagesSeries Expansionteju1996coolPas encore d'évaluation
- Effects of DC voltage on initiation of whirling motion in nanowire oscillatorsDocument30 pagesEffects of DC voltage on initiation of whirling motion in nanowire oscillatorsteju1996coolPas encore d'évaluation
- Experimental Investigation of Process Parameters On Inconel 925 For EDM Process by Using Taguchi MethodDocument6 pagesExperimental Investigation of Process Parameters On Inconel 925 For EDM Process by Using Taguchi MethodVishal Kumar JaiswalPas encore d'évaluation
- Energy Balance Untuk Teknik KimiaDocument19 pagesEnergy Balance Untuk Teknik Kimiamelisa amaliaPas encore d'évaluation
- 12 Class Physics 1-Chapter Sample Paper PDFDocument9 pages12 Class Physics 1-Chapter Sample Paper PDFharshPas encore d'évaluation
- TFA 1 2 3 4 5 6 7 8 9 10 in Nozzles Sizes: OptionDocument1 pageTFA 1 2 3 4 5 6 7 8 9 10 in Nozzles Sizes: OptionrajkumarfPas encore d'évaluation
- PDFDocument36 pagesPDFvishwasdeepjoshiPas encore d'évaluation
- Phet ReflectionDocument3 pagesPhet Reflectionapi-260335088Pas encore d'évaluation
- Renewableand Sustainable Energy ReviewsDocument9 pagesRenewableand Sustainable Energy Reviewssundeep sPas encore d'évaluation
- 12.1 and 12.2 Quiz 1Document1 page12.1 and 12.2 Quiz 1DoraemonPas encore d'évaluation
- Metalic AsDocument16 pagesMetalic AsKarencita Genesis LapibaPas encore d'évaluation
- Electrical Conductivity of Carbon Blacks Under CompressionDocument7 pagesElectrical Conductivity of Carbon Blacks Under CompressionМирослав Кузишин100% (1)
- Mody Institute of Technology and Science, Lakshmangarh Faculty of Engineering and TechnologyDocument3 pagesMody Institute of Technology and Science, Lakshmangarh Faculty of Engineering and TechnologyAtul GaurPas encore d'évaluation
- 06.-Medidor Cloro CL4000enDocument18 pages06.-Medidor Cloro CL4000enLeonel RubioPas encore d'évaluation
- Hammer, Harper, Ryan - 2001 - Past Paleontological Statistics Software Package For Education and Data AnalysisDocument7 pagesHammer, Harper, Ryan - 2001 - Past Paleontological Statistics Software Package For Education and Data AnalysisA3A31234Pas encore d'évaluation
- Egee 101 Reflective Essay 1Document3 pagesEgee 101 Reflective Essay 1api-142590237Pas encore d'évaluation
- Field-Weakening Control Algorithm For Interior Permanent Magnet Synchronous Motor Based On Space-Vector Modulation TechniqueDocument9 pagesField-Weakening Control Algorithm For Interior Permanent Magnet Synchronous Motor Based On Space-Vector Modulation TechniqueArpan GayenPas encore d'évaluation
- Airborne Wind Energy SystemDocument27 pagesAirborne Wind Energy SystemAbin BabyPas encore d'évaluation
- 4th International Conference On Thermal Equipment, Renewable Energy and Rural Development PDFDocument500 pages4th International Conference On Thermal Equipment, Renewable Energy and Rural Development PDFMittapalli SaikiranPas encore d'évaluation
- Dr. Mezmer's Psychopedia of Bad PsychologyDocument378 pagesDr. Mezmer's Psychopedia of Bad PsychologyArt Marr100% (5)
- Physics: Pearson EdexcelDocument16 pagesPhysics: Pearson EdexcelRichard Davidson12100% (1)
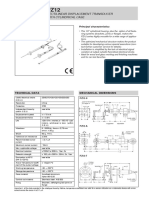
- Rectilinear Displacement Transducer With Cylindrical Case: Technical Data Mechanical DimensionsDocument2 pagesRectilinear Displacement Transducer With Cylindrical Case: Technical Data Mechanical Dimensionsl561926Pas encore d'évaluation
- Modeling Mantle Convection CurrentsDocument3 pagesModeling Mantle Convection Currentsapi-217451187Pas encore d'évaluation
- ASTM STP1385 Durability 2000 Accelerated and Outdoor Weathering TestingDocument186 pagesASTM STP1385 Durability 2000 Accelerated and Outdoor Weathering TestingKYAW SOEPas encore d'évaluation
- Nature Article PDFDocument8 pagesNature Article PDFMehr Asif MahmoodPas encore d'évaluation
- MarriageDocument3 pagesMarriageAstrologerAnjaanPas encore d'évaluation
- Chapter 4Document36 pagesChapter 4Sumedh KakdePas encore d'évaluation
- The Basic Differential Equation For Radial Flow in A Porous MediumDocument8 pagesThe Basic Differential Equation For Radial Flow in A Porous MediumrestofficalPas encore d'évaluation
- Mechanics of Solids: Bela I. Sandor Ryan Roloff Stephen M. Birn Maan H. Jawad Michael L. BrownDocument1 pageMechanics of Solids: Bela I. Sandor Ryan Roloff Stephen M. Birn Maan H. Jawad Michael L. BrownkprasannanPas encore d'évaluation
- Samuel Glasstone - Thermodynamics For Chemists PDFDocument532 pagesSamuel Glasstone - Thermodynamics For Chemists PDFRimmon Singh100% (2)
- CNC CONTOUR VALIDATION WITH LASER BALL BARDocument15 pagesCNC CONTOUR VALIDATION WITH LASER BALL BARNitin DaduPas encore d'évaluation
- Three-Dimensional Effects For Supported Excavations in ClayDocument7 pagesThree-Dimensional Effects For Supported Excavations in ClayrkPas encore d'évaluation