Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- Introduction To Robotics Mechanics and Control 4th Edition Craig Solutions ManualDocument3 pagesIntroduction To Robotics Mechanics and Control 4th Edition Craig Solutions Manuala3905733700% (5)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Exercises Fourier Series PDFDocument3 pagesExercises Fourier Series PDF吳心100% (1)
- M. Spivak - Calculus On Manifolds PDFDocument158 pagesM. Spivak - Calculus On Manifolds PDFEstudante de Ciências100% (1)
- Taylor SeriesDocument10 pagesTaylor SeriesMuhammad Ahmed MunirPas encore d'évaluation
- Scilab Codes Sem IIIDocument15 pagesScilab Codes Sem IIISayan MondalPas encore d'évaluation
- Corso - Perego (Complex Algebraic Surface Note)Document208 pagesCorso - Perego (Complex Algebraic Surface Note)kehao chengPas encore d'évaluation
- MA2223 ch1 PDFDocument16 pagesMA2223 ch1 PDFRAJESH KUMARPas encore d'évaluation
- Complete Trigonometry Class - 1 SSC Special BatchDocument9 pagesComplete Trigonometry Class - 1 SSC Special BatchViksh RayPas encore d'évaluation
- Vertical Line TestDocument8 pagesVertical Line TestArthur LegaspinaPas encore d'évaluation
- Be - First Year Engineering - Semester 1 - 2022 - December - Engineering Mathematics I M1rev 2019c SchemeDocument45 pagesBe - First Year Engineering - Semester 1 - 2022 - December - Engineering Mathematics I M1rev 2019c Schemepjivan1208Pas encore d'évaluation
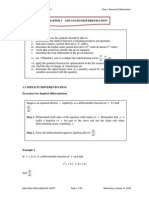
- Chap 1 Advanced DifferentiationDocument25 pagesChap 1 Advanced Differentiationprakash silvarajanPas encore d'évaluation
- Unit-1 M.tech (Vector Space) Dec. 2017Document22 pagesUnit-1 M.tech (Vector Space) Dec. 2017Naveen DubeyPas encore d'évaluation
- SRG AOD QuestionsDocument14 pagesSRG AOD QuestionsHarshul DuaPas encore d'évaluation
- Friedman PDFDocument323 pagesFriedman PDFgmrp2000Pas encore d'évaluation
- c2 4 Trigonometry 1Document47 pagesc2 4 Trigonometry 1Student 365100% (1)
- Table of Specifications GENERAL MATHEMATICSDocument4 pagesTable of Specifications GENERAL MATHEMATICSOmengMagcalas100% (2)
- Cauchy's Root TestDocument1 pageCauchy's Root TestFirdous AhmadPas encore d'évaluation
- Table of Integrals PDFDocument1 pageTable of Integrals PDFangelo dedicatoriaPas encore d'évaluation
- Systems Analysis and Control: Matthew M. PeetDocument23 pagesSystems Analysis and Control: Matthew M. Peetप्रकाश विश्वकर्माPas encore d'évaluation
- (Graduate Texts in Mathematics 67) Jean-Pierre Serre (Auth.) - Local Fields-Springer-Verlag New York (1979)Document248 pages(Graduate Texts in Mathematics 67) Jean-Pierre Serre (Auth.) - Local Fields-Springer-Verlag New York (1979)Carlos BolañosPas encore d'évaluation
- Language Fundamentals: Entering CommandsDocument109 pagesLanguage Fundamentals: Entering CommandsNor ManPas encore d'évaluation
- Zun ZunDocument14 pagesZun Zunarcher183Pas encore d'évaluation
- Exercices Corrigesd AnalysepremiereanneeuniversitaireDocument131 pagesExercices Corrigesd AnalysepremiereanneeuniversitaireccccPas encore d'évaluation
- Complex Variables: Question and AnswereDocument15 pagesComplex Variables: Question and AnswereveerendraPas encore d'évaluation
- Lab. Manual PDFDocument310 pagesLab. Manual PDFZedrik MojicaPas encore d'évaluation
- Walter - On The Metric Projection Onto Convex Sets in Riemannian SpacesDocument8 pagesWalter - On The Metric Projection Onto Convex Sets in Riemannian SpacesLurozioPas encore d'évaluation
- Backhouse Et Al - Category Lattice Theory (1998)Document142 pagesBackhouse Et Al - Category Lattice Theory (1998)mymajiaPas encore d'évaluation
- MATH Assignment 3Document3 pagesMATH Assignment 3SamvanBetuwPas encore d'évaluation
- CryptographyDocument10 pagesCryptographyKarylle AquinoPas encore d'évaluation
- Adrian Doicu, Yuri A. Eremin, Thomas Wriedt-Acoustic and Electromagnetic Scattering Analysis Using Discrete Sources (2000)Document315 pagesAdrian Doicu, Yuri A. Eremin, Thomas Wriedt-Acoustic and Electromagnetic Scattering Analysis Using Discrete Sources (2000)SQ RfPas encore d'évaluation