Vous aimerez peut-être aussi
- Large Low-Speed Facility (LLF)Document8 pagesLarge Low-Speed Facility (LLF)Caio CramerPas encore d'évaluation
- Comparison of The 10 at The Nasa Glenn Research Center For Low-Speed (Subsonic) OperationDocument13 pagesComparison of The 10 at The Nasa Glenn Research Center For Low-Speed (Subsonic) OperationspbhavnaPas encore d'évaluation
- Aiaa 2009 530 230Document10 pagesAiaa 2009 530 230mycrowsobt1Pas encore d'évaluation
- bUILDING & TESTING A WIND TUNNELDocument14 pagesbUILDING & TESTING A WIND TUNNELTochi Krishna Abhishek100% (1)
- The New Closed Circuit Wind Tunnel of The Aircraft Laboratory of University of São Paulo, BrazilDocument8 pagesThe New Closed Circuit Wind Tunnel of The Aircraft Laboratory of University of São Paulo, Brazilreza mohammedPas encore d'évaluation
- Reading QuizDocument4 pagesReading QuizAlberto MosquedaPas encore d'évaluation
- Aerodynamic Design For FSAE CarDocument4 pagesAerodynamic Design For FSAE CarMohamed NaderPas encore d'évaluation
- Seifert Drag AIAAPaper v12Document14 pagesSeifert Drag AIAAPaper v12Avtansh GhaiPas encore d'évaluation
- Introduction To Wind TunnelsDocument5 pagesIntroduction To Wind TunnelsFaiq AhmadPas encore d'évaluation
- AerodynamicsDocument16 pagesAerodynamicsanthonyPas encore d'évaluation
- Aeroacoustics Simulation of An Automotive A-Pillar Rain GutterDocument12 pagesAeroacoustics Simulation of An Automotive A-Pillar Rain GutterJose David Duque MedinaPas encore d'évaluation
- Development Methodologies For Formula One Aerodynamics: 2.1. The Wind Tunnel 2.1.1. Wind Tunnel ConfigurationDocument10 pagesDevelopment Methodologies For Formula One Aerodynamics: 2.1. The Wind Tunnel 2.1.1. Wind Tunnel ConfigurationAditya APPas encore d'évaluation
- Open Jet Test Section Criteria For Formula 1Document9 pagesOpen Jet Test Section Criteria For Formula 1VyssionPas encore d'évaluation
- Drag Reduction of Motor Vehicles by Active Flow Control Using The Coanda EffectDocument12 pagesDrag Reduction of Motor Vehicles by Active Flow Control Using The Coanda EffectVivek KantiPas encore d'évaluation
- On The Aerodynamics of Tractor-TrailersDocument22 pagesOn The Aerodynamics of Tractor-TrailersLuqman AmbadiPas encore d'évaluation
- Jacobs 2011 Final Wind Tunnel DesignDocument8 pagesJacobs 2011 Final Wind Tunnel DesignAhmed AdelPas encore d'évaluation
- AIAA2008 Ballmann SmallDocument15 pagesAIAA2008 Ballmann SmallAndreea BoboneaPas encore d'évaluation
- IzvadociStandard VDI2053 СО+ventilacijaGARAZIDocument24 pagesIzvadociStandard VDI2053 СО+ventilacijaGARAZIErica MorrisonPas encore d'évaluation
- Kshitiz Gupta Ad 2 AssignmentDocument24 pagesKshitiz Gupta Ad 2 AssignmentAISHWARYA GOLEYPas encore d'évaluation
- Low Speed Wind TunnelDocument22 pagesLow Speed Wind TunnelAbida BegumPas encore d'évaluation
- Experimental Wake Investigation of A Solar Powered Car4 With Pic For Final PresDocument19 pagesExperimental Wake Investigation of A Solar Powered Car4 With Pic For Final PresPhillip SterbenzPas encore d'évaluation
- AerodynamicsDocument23 pagesAerodynamicsadwankarparagPas encore d'évaluation
- Aerodynamic Drag Reduction On A Simple Car-Like Shape With Rear Upper Body TaperDocument9 pagesAerodynamic Drag Reduction On A Simple Car-Like Shape With Rear Upper Body TaperPruthvirajPas encore d'évaluation
- Wind TunnelDocument18 pagesWind Tunnellance dandanPas encore d'évaluation
- Experimental Investigation Oflift To Drag RatioDocument8 pagesExperimental Investigation Oflift To Drag RatioMd. Azimur RahmanPas encore d'évaluation
- Timmer PaperAIAA20030352Document11 pagesTimmer PaperAIAA20030352davo87Pas encore d'évaluation
- Caline4 PrsentationDocument16 pagesCaline4 PrsentationIancovici Sasha100% (1)
- Timmer PaperAIAA20030352Document11 pagesTimmer PaperAIAA20030352gerritgrootPas encore d'évaluation
- Duct Loop and VAVDocument10 pagesDuct Loop and VAVengomar76Pas encore d'évaluation
- The Prandtl WingDocument23 pagesThe Prandtl WingHermes®Pas encore d'évaluation
- Recent Progress in Some Aircraft TechnologiesDocument196 pagesRecent Progress in Some Aircraft TechnologiesMatevž BrojanPas encore d'évaluation
- Thesis PneumaticsDocument5 pagesThesis PneumaticsHelpWritingCollegePapersSavannah100% (2)
- CFD Aerodinamics For Volvo CarsDocument10 pagesCFD Aerodinamics For Volvo Carsfreakyjoint4113Pas encore d'évaluation
- Wind Tunnel Experiments 10 11Document4 pagesWind Tunnel Experiments 10 11Kaashyap SarmaPas encore d'évaluation
- FP 249 02 Steel Casting For Viennas ULF TramDocument3 pagesFP 249 02 Steel Casting For Viennas ULF TramstevenminhtamPas encore d'évaluation
- Backpressure Characteristics of Modern Three-Way Catalysts, Benefit On Engine PerformanceDocument9 pagesBackpressure Characteristics of Modern Three-Way Catalysts, Benefit On Engine Performancearash501Pas encore d'évaluation
- Overview On Drag Reduction Technologies For Civil Transport AircraftDocument18 pagesOverview On Drag Reduction Technologies For Civil Transport Aircraftash78633Pas encore d'évaluation
- Low-Speed Wind TunnelDocument32 pagesLow-Speed Wind TunnellucioctsicilPas encore d'évaluation
- Brosseaud Et Al 1993Document10 pagesBrosseaud Et Al 1993Luis Miguel Gutierrez KlinskyPas encore d'évaluation
- Aiaa Abstract PDFDocument9 pagesAiaa Abstract PDFsdecadiPas encore d'évaluation
- An Overview of NACA 6-Digit Airfoil Series Characteristics PDFDocument13 pagesAn Overview of NACA 6-Digit Airfoil Series Characteristics PDFBala ChandarPas encore d'évaluation
- Modern Solutions For Ground Vibration Testing of Large AircraftDocument8 pagesModern Solutions For Ground Vibration Testing of Large Aircraftuamiranda3518Pas encore d'évaluation
- 15 Wang2014Document14 pages15 Wang2014SanthiPas encore d'évaluation
- Computers & Fluids: Charles-Henri Bruneau, Emmanuel Creusé, Delphine Depeyras, Patrick Gilliéron, Iraj MortazaviDocument18 pagesComputers & Fluids: Charles-Henri Bruneau, Emmanuel Creusé, Delphine Depeyras, Patrick Gilliéron, Iraj MortazaviVatsalya SharmaPas encore d'évaluation
- Design Construction and Performance Test of A Low Cost Subsonic Wind TunnelDocument10 pagesDesign Construction and Performance Test of A Low Cost Subsonic Wind TunnelalfredsunnyPas encore d'évaluation
- Full-Scale, Wind Tunnel and CFD Wind Engineering StudiesDocument18 pagesFull-Scale, Wind Tunnel and CFD Wind Engineering StudiesOscar David Hernandez GiraldoPas encore d'évaluation
- Labyrinth SealDocument29 pagesLabyrinth SealbambsoePas encore d'évaluation
- Experimental Investigation of Ground Transportation Systems (GTS) Project For Heavy Vehicle Drag Reduction PDFDocument23 pagesExperimental Investigation of Ground Transportation Systems (GTS) Project For Heavy Vehicle Drag Reduction PDFMarcusHuynh88Pas encore d'évaluation
- New Project PDFDocument27 pagesNew Project PDFsampath kumar K NPas encore d'évaluation
- New Project PDFDocument27 pagesNew Project PDFsampath kumar K NPas encore d'évaluation
- Numerical Simulation of Drag Reduction in Formula One CarsDocument5 pagesNumerical Simulation of Drag Reduction in Formula One Carssultanu89Pas encore d'évaluation
- CFD Analysis of Pelton Runner: Amod Panthee, Hari Prasad Neopane, Bhola ThapaDocument6 pagesCFD Analysis of Pelton Runner: Amod Panthee, Hari Prasad Neopane, Bhola ThapaMuhammad HasdarPas encore d'évaluation
- Subsonic Wind Tunnel TestingDocument20 pagesSubsonic Wind Tunnel TestingGovardhan ReddyPas encore d'évaluation
- Design Methodology For A Quick and Low-Cost Wind TunnelDocument2 pagesDesign Methodology For A Quick and Low-Cost Wind TunnelDang Tien PhucPas encore d'évaluation
- Reproduction of Real-World Road Profiles On A Four-Poster Rig For Indoor Vehicle Chassis and Suspension Durability TestingDocument10 pagesReproduction of Real-World Road Profiles On A Four-Poster Rig For Indoor Vehicle Chassis and Suspension Durability TestingVanHieu LuyenPas encore d'évaluation
- Chapter 2 - Wind Tunnel-1Document22 pagesChapter 2 - Wind Tunnel-1史考特Pas encore d'évaluation
- AerodynamicsDocument32 pagesAerodynamicsManish RajPas encore d'évaluation
- Terramechanics and Off-Road Vehicle Engineering: Terrain Behaviour, Off-Road Vehicle Performance and DesignD'EverandTerramechanics and Off-Road Vehicle Engineering: Terrain Behaviour, Off-Road Vehicle Performance and DesignÉvaluation : 5 sur 5 étoiles5/5 (1)
- Marine Rudders and Control Surfaces: Principles, Data, Design and ApplicationsD'EverandMarine Rudders and Control Surfaces: Principles, Data, Design and ApplicationsÉvaluation : 4.5 sur 5 étoiles4.5/5 (3)
- 2000 The Adavantages and Disadvantages of Dynamic Load Testing and Statnamic Load Testing Middendorp Ginneken enDocument8 pages2000 The Adavantages and Disadvantages of Dynamic Load Testing and Statnamic Load Testing Middendorp Ginneken enJorge Eduardo Pérez LoaizaPas encore d'évaluation
- GATCHDocument6 pagesGATCHsudhakarmnPas encore d'évaluation
- PH6151-Engineering Physics-I PDFDocument133 pagesPH6151-Engineering Physics-I PDFRìzwàñ Checkzz II100% (1)
- Lab Sheet 2 PDFDocument13 pagesLab Sheet 2 PDFmalaPas encore d'évaluation
- CHNG 3802 Heat Transfer Tutorial Answers Weeks 1-4Document9 pagesCHNG 3802 Heat Transfer Tutorial Answers Weeks 1-4IshanSanePas encore d'évaluation
- Airlift PumpDocument3 pagesAirlift Pumpveliger2009Pas encore d'évaluation
- CE 111 - 01c - Open Channel Flow - Specific EnergyDocument8 pagesCE 111 - 01c - Open Channel Flow - Specific EnergymowriePas encore d'évaluation
- Trisha Banerjee at 2010Document7 pagesTrisha Banerjee at 2010Physics InstrumentsPas encore d'évaluation
- New Microsoft Word Document 4.1Document19 pagesNew Microsoft Word Document 4.1prashantmaukaPas encore d'évaluation
- Chapter 23-Entropy & Gibbs EnergyDocument26 pagesChapter 23-Entropy & Gibbs EnergyWENDY MENDIOLAPas encore d'évaluation
- Cohesion Bloque EpsDocument8 pagesCohesion Bloque EpsNathalia PenagosPas encore d'évaluation
- Aerospace MGD v12-1 PDFDocument151 pagesAerospace MGD v12-1 PDFDenis DalliPas encore d'évaluation
- ME PHD Handbook 3 18Document42 pagesME PHD Handbook 3 18SamsonPas encore d'évaluation
- AbsorptivityDocument4 pagesAbsorptivityAi VInPas encore d'évaluation
- Meteorology: Background ConceptsDocument98 pagesMeteorology: Background ConceptsPuja Kadam Ghadi100% (1)
- Chapter 4 TorsionDocument20 pagesChapter 4 Torsionشكار حسينPas encore d'évaluation
- J2006 - Termodinamik 1 - UNIT0Document12 pagesJ2006 - Termodinamik 1 - UNIT0Ahmas SyaakirPas encore d'évaluation
- Mapua University: 3 Calorimetry 5 Libo-On, Eldon RyanDocument14 pagesMapua University: 3 Calorimetry 5 Libo-On, Eldon RyanEldon Ryan Sabio Libo-onPas encore d'évaluation
- MODULE3Document56 pagesMODULE3Saurabh Tripathi oe21m031Pas encore d'évaluation
- MOS II - TUTORIAL SHEET Week 4 PDFDocument2 pagesMOS II - TUTORIAL SHEET Week 4 PDFShirishaVijayapuramPas encore d'évaluation
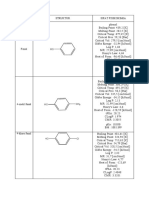
- Nama Struktur Sifat FisikokimiaDocument12 pagesNama Struktur Sifat FisikokimiaFarisi RazakPas encore d'évaluation
- Combined Gas LawDocument19 pagesCombined Gas LawDhea Angela A. Capuyan100% (2)
- Lab ReportDocument6 pagesLab ReportNero SwanPas encore d'évaluation
- Paraffins-101: Shekhar Khandekar Global Flow Assurance ManagerDocument55 pagesParaffins-101: Shekhar Khandekar Global Flow Assurance ManagerSamuel OnyewuenyiPas encore d'évaluation
- Chap 5Document50 pagesChap 5keto2008Pas encore d'évaluation
- HVAC en CatalogueDocument64 pagesHVAC en CataloguesafinditPas encore d'évaluation
- FluidslabDocument4 pagesFluidslabFredrick OduorPas encore d'évaluation
- Numerical Simulation of Two-Dimensional Laminar Slot-Jet Impingement Flows Confined by A Parallel WallDocument19 pagesNumerical Simulation of Two-Dimensional Laminar Slot-Jet Impingement Flows Confined by A Parallel WallAEPas encore d'évaluation
- Skid Calculation Sheet: Reference: Pressure Vessel Handbook, Eugene F. Megyesy MaterialDocument8 pagesSkid Calculation Sheet: Reference: Pressure Vessel Handbook, Eugene F. Megyesy MaterialAzharyanto FadhliPas encore d'évaluation
- Chapter - V-Design of Shallow FoundationDocument90 pagesChapter - V-Design of Shallow Foundationabyalew b.Pas encore d'évaluation