Vous aimerez peut-être aussi
- GRE VocabularyDocument63 pagesGRE VocabularyGrantHermanPas encore d'évaluation
- 5.2 PolynomialsDocument2 pages5.2 PolynomialskcarveyPas encore d'évaluation
- Seismic Design of Reinforced Concrete Special Moment FramesDocument31 pagesSeismic Design of Reinforced Concrete Special Moment FrameswilfredPas encore d'évaluation
- Algebra Class 8 (Zambak) - Zambak Publishing PDF Fraction (Mathematics) Rational NumberDocument1 pageAlgebra Class 8 (Zambak) - Zambak Publishing PDF Fraction (Mathematics) Rational NumberAisha MedetPas encore d'évaluation
- Wind Load Examples of Revised 875 Part 3Document110 pagesWind Load Examples of Revised 875 Part 3PRABHUTIRUPURPas encore d'évaluation
- 1ST Quarter ExamDocument3 pages1ST Quarter ExamFranie Rose MayoPas encore d'évaluation
- Longman Academic Word ListDocument9 pagesLongman Academic Word ListNimblePas encore d'évaluation
- (Algorithms and Computation in Mathematics 1) Manuel Bronstein (Auth.) - Symbolic Integration I - Transcendental Functions (2005, Springer-Verlag Berlin Heidelberg)Document330 pages(Algorithms and Computation in Mathematics 1) Manuel Bronstein (Auth.) - Symbolic Integration I - Transcendental Functions (2005, Springer-Verlag Berlin Heidelberg)jafobr4152Pas encore d'évaluation
- Numerical Simulation of Fluid-Structure Interaction Problems With Hyperelastic Models I: A Partitioned ApproachDocument43 pagesNumerical Simulation of Fluid-Structure Interaction Problems With Hyperelastic Models I: A Partitioned ApproachElhaaaamPas encore d'évaluation
- History Matching of Three-Phase Flow Production DataDocument13 pagesHistory Matching of Three-Phase Flow Production DatamsmsoftPas encore d'évaluation
- Multigrid methods for isogeometric discretizationDocument13 pagesMultigrid methods for isogeometric discretizationtomar_skPas encore d'évaluation
- A Finite Volume Method On NURBS Geometries and Its Application in Isogeometric Fluid-Structure InteractionDocument22 pagesA Finite Volume Method On NURBS Geometries and Its Application in Isogeometric Fluid-Structure InteractionbradjenoPas encore d'évaluation
- On The Formulation of Closest-Point Projection Algorithms in Elastoplasticity - Part IDocument38 pagesOn The Formulation of Closest-Point Projection Algorithms in Elastoplasticity - Part IMilanPas encore d'évaluation
- Numerical Simulation of Coupled Uid Solid Problems: Michael SCH Afer, Ilka TeschauerDocument23 pagesNumerical Simulation of Coupled Uid Solid Problems: Michael SCH Afer, Ilka TeschauerBahadır HarmancıPas encore d'évaluation
- A Mixed Finite Element For Interlaminar Stress Computation: Yi-Bing ShiDocument10 pagesA Mixed Finite Element For Interlaminar Stress Computation: Yi-Bing ShiR Vignesh BabuPas encore d'évaluation
- Art19 Modelo Ede EspesadorDocument32 pagesArt19 Modelo Ede EspesadorCarlos de la TorrePas encore d'évaluation
- Mixed FEM For ElastoplasticityDocument30 pagesMixed FEM For ElastoplasticitySadiq SarfarazPas encore d'évaluation
- Seismic Response Analysis Using Inelasticity-Separated Scaled Boundary Finite Element MethodDocument6 pagesSeismic Response Analysis Using Inelasticity-Separated Scaled Boundary Finite Element MethodSaker MohamedPas encore d'évaluation
- Upscale1 PDFDocument8 pagesUpscale1 PDFPondok HudaPas encore d'évaluation
- A Roe Type Scheme_two Phase Flow (Pelanti and Mangney)Document35 pagesA Roe Type Scheme_two Phase Flow (Pelanti and Mangney)Avinash SajwanPas encore d'évaluation
- Journal of Computational Physics: Armando Coco, Giovanni RussoDocument38 pagesJournal of Computational Physics: Armando Coco, Giovanni RussoAnonymous tIwg2AyPas encore d'évaluation
- ADMOS 2013 conference paper on fully coupled finite volume solverDocument12 pagesADMOS 2013 conference paper on fully coupled finite volume solverErnesto Delfino AguirrePas encore d'évaluation
- A Computational Model For Suspended Large Rigid Bodies in 3D Unsteady Viscous Flows XiaoDocument32 pagesA Computational Model For Suspended Large Rigid Bodies in 3D Unsteady Viscous Flows XiaowatersakanaPas encore d'évaluation
- 3D Regularized U (I) Rheology For Granular Flows Simulation PDFDocument36 pages3D Regularized U (I) Rheology For Granular Flows Simulation PDFLuis Saavedra Santa MariaPas encore d'évaluation
- Paper 1694 REV1Document18 pagesPaper 1694 REV1Ricardo Horacio LoreficePas encore d'évaluation
- On The Accuracy of Finite Difference Solutions For Nonlinear Water WavesDocument28 pagesOn The Accuracy of Finite Difference Solutions For Nonlinear Water WavesMed Ali MaatougPas encore d'évaluation
- Radial Return Method Applied in Thick-Walled Cylinder AnalysisDocument15 pagesRadial Return Method Applied in Thick-Walled Cylinder AnalysisAndré RodriguesPas encore d'évaluation
- Heaviside's Operators and Contour IntegralsDocument28 pagesHeaviside's Operators and Contour IntegralsalpcruzPas encore d'évaluation
- The Shallow Water Equations An Example of Hyperbolic SystemDocument32 pagesThe Shallow Water Equations An Example of Hyperbolic SystemChibaka WarsPas encore d'évaluation
- 2D Flow Around a Cylinder Using LBMDocument5 pages2D Flow Around a Cylinder Using LBMRory LockePas encore d'évaluation
- ManuscriptDocument20 pagesManuscriptYáñez Olmos YañezPas encore d'évaluation
- Pan2015 Argetina 9781614996033-0961Document8 pagesPan2015 Argetina 9781614996033-0961raydellrPas encore d'évaluation
- Recent Developments in Second-Order Integration Methods for J2 Plasticity ModelsDocument6 pagesRecent Developments in Second-Order Integration Methods for J2 Plasticity ModelscyrusnasiraiPas encore d'évaluation
- JP FernandezDocument251 pagesJP FernandezDiiana WhiteleyPas encore d'évaluation
- Use COMSOL for efficient inverse modeling of aquifersDocument8 pagesUse COMSOL for efficient inverse modeling of aquifersLexin LiPas encore d'évaluation
- High-Performance Abaqus Simulations in Soil Mechanics: H.M. Hügel, S. Henke, S. KinzlerDocument15 pagesHigh-Performance Abaqus Simulations in Soil Mechanics: H.M. Hügel, S. Henke, S. Kinzlerabubaker ahmedPas encore d'évaluation
- The Reduced Model Multiscale Method (R3M) For The Non-Linear Homogenization of Hyperelastic Media at Finite StrainsDocument28 pagesThe Reduced Model Multiscale Method (R3M) For The Non-Linear Homogenization of Hyperelastic Media at Finite Strainssaded05Pas encore d'évaluation
- Part IDocument12 pagesPart Iruining.chengPas encore d'évaluation
- A Residual-Based A Posteriori Error Estimator For A Fully-Mixed Formulation of The Stokes-Darcy Coupled ProblemDocument34 pagesA Residual-Based A Posteriori Error Estimator For A Fully-Mixed Formulation of The Stokes-Darcy Coupled ProblemroyarzuaPas encore d'évaluation
- Journal of Computational Physics: K. Lipnikov, G. ManziniDocument26 pagesJournal of Computational Physics: K. Lipnikov, G. ManzinidwstephensPas encore d'évaluation
- Analysis of Traffic FlowDocument7 pagesAnalysis of Traffic FlowmansPas encore d'évaluation
- N-S Equations: Deriving Pressure Poisson EquationDocument3 pagesN-S Equations: Deriving Pressure Poisson EquationSaumya SinhaPas encore d'évaluation
- Bickel and Levina 2004Document28 pagesBickel and Levina 2004dfaini12Pas encore d'évaluation
- Cam-Clay Plasticity, Part II Implicit Integration of Constitutive Equation Based On A Nonlinear Elastic Stress PredictorDocument16 pagesCam-Clay Plasticity, Part II Implicit Integration of Constitutive Equation Based On A Nonlinear Elastic Stress PredictorAyman AbedPas encore d'évaluation
- 1 s2.0 S0378475420304146 MainDocument20 pages1 s2.0 S0378475420304146 MainAshishPas encore d'évaluation
- Applsci 11 04637 v2Document27 pagesApplsci 11 04637 v2Gemechis KebedePas encore d'évaluation
- Alkylation 2Document22 pagesAlkylation 2aysar JarullahPas encore d'évaluation
- Preconditioning Markov Chain Monte Carlo Simulations Using Coarse-Scale ModelsDocument29 pagesPreconditioning Markov Chain Monte Carlo Simulations Using Coarse-Scale ModelsRajiv AgPas encore d'évaluation
- An Embedded Dirichlet Formulation For 3D Continua: A. Gerstenberger and W. A. WallDocument27 pagesAn Embedded Dirichlet Formulation For 3D Continua: A. Gerstenberger and W. A. WallelmalikiPas encore d'évaluation
- A Finite Element Approach Using An Augmented Lagrangian Method To Simulate Impact Problems Under Large 3D Elastoplastic DeformationDocument9 pagesA Finite Element Approach Using An Augmented Lagrangian Method To Simulate Impact Problems Under Large 3D Elastoplastic DeformationleivajPas encore d'évaluation
- WLRDocument4 pagesWLREstira Woro Astrini MartodihardjoPas encore d'évaluation
- Boundary Element Technique in Petroleum Reservoir SimulationDocument8 pagesBoundary Element Technique in Petroleum Reservoir Simulationiky77Pas encore d'évaluation
- 1 s2.0 S0377042720301631 MainDocument14 pages1 s2.0 S0377042720301631 Mainmat20d002Pas encore d'évaluation
- Fan 1999Document24 pagesFan 1999Pratyush MohantyPas encore d'évaluation
- Formulation and Implementation of Stress-Driven And/or Strain-Driven Computational Homogenization For Finite StrainDocument20 pagesFormulation and Implementation of Stress-Driven And/or Strain-Driven Computational Homogenization For Finite StrainAndrea PrannoPas encore d'évaluation
- HenningDocument43 pagesHenningtinaanaPas encore d'évaluation
- CFD Mini ProjectDocument11 pagesCFD Mini ProjectSujay PrabhatPas encore d'évaluation
- Numerical Analysis of A Locking-Free Mixed Finite Element Method For A Bending Moment Formulation of Reissner-Mindlin Plate ModelDocument24 pagesNumerical Analysis of A Locking-Free Mixed Finite Element Method For A Bending Moment Formulation of Reissner-Mindlin Plate ModelAugusto De BiassiPas encore d'évaluation
- A Comparison Between The Perzyna Viscoplastic Model and The Consistency Viscoplastic ModelDocument12 pagesA Comparison Between The Perzyna Viscoplastic Model and The Consistency Viscoplastic ModelPac AgathePas encore d'évaluation
- Journal of Computational Physics: Abbas Fakhari, Diogo BolsterDocument19 pagesJournal of Computational Physics: Abbas Fakhari, Diogo BolsterLi RexPas encore d'évaluation
- GirolamiDocument92 pagesGirolamiHyacpitPas encore d'évaluation
- A Transient Manufactured Solution For The Compressible Navier-Stokes Equations With A Power Law ViscosityDocument16 pagesA Transient Manufactured Solution For The Compressible Navier-Stokes Equations With A Power Law ViscosityRhysUPas encore d'évaluation
- Methods For FluidsDocument37 pagesMethods For FluidsPau L. RiquelmePas encore d'évaluation
- A N Analysis of A New Class of Integration Algorithms For Elastoplastic Constitutive RelationsDocument14 pagesA N Analysis of A New Class of Integration Algorithms For Elastoplastic Constitutive RelationsArunPas encore d'évaluation
- Multip PhysicsDocument1 pageMultip PhysicsAbhinawPas encore d'évaluation
- The Mimetic Finite Difference Method for Elliptic ProblemsD'EverandThe Mimetic Finite Difference Method for Elliptic ProblemsPas encore d'évaluation
- High Performance Computing and the Discrete Element Model: Opportunity and ChallengeD'EverandHigh Performance Computing and the Discrete Element Model: Opportunity and ChallengePas encore d'évaluation
- Simplified Notes of Calculate Wind & Snow Loads Based On CYS EC1Document15 pagesSimplified Notes of Calculate Wind & Snow Loads Based On CYS EC1GrantHermanPas encore d'évaluation
- Job - 438 British Council IELTS Online Application PDFDocument4 pagesJob - 438 British Council IELTS Online Application PDFGrantHermanPas encore d'évaluation
- IS-875-Part1 - Dead Loads For DesignDocument39 pagesIS-875-Part1 - Dead Loads For Designlokesh2325100% (7)
- 6min English ShoppingDocument6 pages6min English Shoppingquanghuy_tangPas encore d'évaluation
- BDocument7 pagesBGrantHermanPas encore d'évaluation
- CDocument11 pagesCGrantHermanPas encore d'évaluation
- Academic Vocabulary ListDocument42 pagesAcademic Vocabulary ListHarunVeledarPas encore d'évaluation
- 6 Minute English TheatreDocument7 pages6 Minute English TheatreRogerio LibarinoPas encore d'évaluation
- Express English Flowers PDFDocument1 pageExpress English Flowers PDFGrantHermanPas encore d'évaluation
- GT IELTS Writing Task 1 (Part 1)Document4 pagesGT IELTS Writing Task 1 (Part 1)GrantHerman100% (2)
- Finite Element - 1601.02361Document16 pagesFinite Element - 1601.02361GrantHermanPas encore d'évaluation
- GT IELTS Writing Task 1 (Part 2)Document4 pagesGT IELTS Writing Task 1 (Part 2)GrantHermanPas encore d'évaluation
- Finite Element - 1601.02942Document42 pagesFinite Element - 1601.02942GrantHermanPas encore d'évaluation
- Finite Element - 1508.02136Document23 pagesFinite Element - 1508.02136GrantHermanPas encore d'évaluation
- Finite ElementDocument29 pagesFinite ElementGrantHermanPas encore d'évaluation
- Finite Element-Gfemgl Hexes Fracture AcceptedDocument34 pagesFinite Element-Gfemgl Hexes Fracture AcceptedGrantHermanPas encore d'évaluation
- Seismic Reinforcement 6Document13 pagesSeismic Reinforcement 6GrantHermanPas encore d'évaluation
- 1506.06099 Finite ElementDocument66 pages1506.06099 Finite ElementGrantHermanPas encore d'évaluation
- Journal of Materials Processing Technology: Se-Yun Hwang, Yooil Kim, Jang-Hyun LeeDocument12 pagesJournal of Materials Processing Technology: Se-Yun Hwang, Yooil Kim, Jang-Hyun LeeGrantHermanPas encore d'évaluation
- Seismic Reinforcement 3Document15 pagesSeismic Reinforcement 3GrantHermanPas encore d'évaluation
- Seismic Reinforcement 5Document16 pagesSeismic Reinforcement 5GrantHermanPas encore d'évaluation
- Seismic Reinforcement 4Document8 pagesSeismic Reinforcement 4GrantHermanPas encore d'évaluation
- Engineering Mechanics (ME 105) Tutorial Sheet-1 SolutionsDocument7 pagesEngineering Mechanics (ME 105) Tutorial Sheet-1 SolutionsVikrant SharmaPas encore d'évaluation
- Winmeen VAO Mission 100: Number SeriesDocument6 pagesWinmeen VAO Mission 100: Number SeriesarunturboPas encore d'évaluation
- DML (UE18CS205) - Unit 5 (Algebraic Structures)Document61 pagesDML (UE18CS205) - Unit 5 (Algebraic Structures)Ayush PESU IO TeamPas encore d'évaluation
- Least-Squares Data Fitting: EE263 Autumn 2015 S. Boyd and S. LallDocument17 pagesLeast-Squares Data Fitting: EE263 Autumn 2015 S. Boyd and S. LallMouliPas encore d'évaluation
- Esolutions Manual - Powered by CogneroDocument15 pagesEsolutions Manual - Powered by CogneroAbusakur Hamsani0% (1)
- Discrete-Time Linear Systems: Automatic Control 1Document32 pagesDiscrete-Time Linear Systems: Automatic Control 1Anonymous L7XrxpeI1zPas encore d'évaluation
- Generic Solution Methods For LPDocument186 pagesGeneric Solution Methods For LPRaftPas encore d'évaluation
- Chapter 01Document28 pagesChapter 01Lee DickensPas encore d'évaluation
- Three Dimensional Geometry PDFDocument41 pagesThree Dimensional Geometry PDFsourav royPas encore d'évaluation
- An Analysis On Extracting Square and Cube Roots by Aryabhata's MethodsDocument4 pagesAn Analysis On Extracting Square and Cube Roots by Aryabhata's MethodsPrateekSharmaPas encore d'évaluation
- Discrete Fourier Series and Transform ExplainedDocument49 pagesDiscrete Fourier Series and Transform Explainedyadavsticky5108Pas encore d'évaluation
- Spherical Harmonics and the Funk-Hecke TheoremDocument8 pagesSpherical Harmonics and the Funk-Hecke TheoremFadly NurullahPas encore d'évaluation
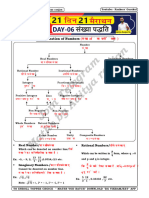
- DAY 06 Number System-01 (21 Days 21 Marathon)Document5 pagesDAY 06 Number System-01 (21 Days 21 Marathon)Janaksinh ZalaPas encore d'évaluation
- Quantitative Methods For Management SciencesDocument158 pagesQuantitative Methods For Management SciencesSumudu AdikariPas encore d'évaluation
- Algebra Systems of Equations Two Variables AllDocument20 pagesAlgebra Systems of Equations Two Variables AllSaifudin SajadiPas encore d'évaluation
- 06 Numerical Differentiation IntegrationDocument50 pages06 Numerical Differentiation IntegrationArlene F. MontalboPas encore d'évaluation
- Exact SequensesDocument7 pagesExact SequensesTHÚY LÊPas encore d'évaluation
- Full Text 4Document17 pagesFull Text 4David BensoussanPas encore d'évaluation
- Sz-4 (Maths) AssignmentDocument12 pagesSz-4 (Maths) AssignmentScience done rightPas encore d'évaluation
- Notes 2019 09 19 14 10 07 1 2019 10 11 10 44 37Document152 pagesNotes 2019 09 19 14 10 07 1 2019 10 11 10 44 37daniela garciaPas encore d'évaluation
- 2-Mathematics Numerics Derivation and OpenFOAMDocument145 pages2-Mathematics Numerics Derivation and OpenFOAM宋沫儒Pas encore d'évaluation
- Eigenmath ManualDocument54 pagesEigenmath ManualIhya_Akbary_2751Pas encore d'évaluation
- Factoring PracticeDocument16 pagesFactoring PracticeAra HerreraPas encore d'évaluation
- Matematik Tambahan Tingkatan 5 2015 Yearly PlanDocument9 pagesMatematik Tambahan Tingkatan 5 2015 Yearly PlanSuziana MohamadPas encore d'évaluation
- 2010 Set B Paper 3 RVHS Promo (Solutions)Document12 pages2010 Set B Paper 3 RVHS Promo (Solutions)Lim Kew ChongPas encore d'évaluation
- Term - Wise Syllabus Session-2019-20 Class-VIII Subject: MathematicsDocument53 pagesTerm - Wise Syllabus Session-2019-20 Class-VIII Subject: MathematicsDebayan MitraPas encore d'évaluation