Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Midterm2 cp372 SolutionDocument8 pagesMidterm2 cp372 SolutionbottbottPas encore d'évaluation
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- Blackout Survival GuideDocument24 pagesBlackout Survival GuideGeorgetta88% (17)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- 2020 - Zalo Credential PDFDocument49 pages2020 - Zalo Credential PDFLong Ellery PhamPas encore d'évaluation
- Ringmakers of Saturn - What Is The TruthDocument6 pagesRingmakers of Saturn - What Is The TruthQuetzal Coatl100% (2)
- Troubleshooting - NetScaler Load Balancing & Packet DropDocument8 pagesTroubleshooting - NetScaler Load Balancing & Packet DropajitPas encore d'évaluation
- Graft Is Public Enemy NoDocument2 pagesGraft Is Public Enemy NochowhkPas encore d'évaluation
- Allardyce To Sue FA Over SackingDocument1 pageAllardyce To Sue FA Over SackingchowhkPas encore d'évaluation
- Malaysians Are Going PlacesDocument1 pageMalaysians Are Going PlaceschowhkPas encore d'évaluation
- Is Crayon Shin-Chan The Bad Boy of MangaDocument3 pagesIs Crayon Shin-Chan The Bad Boy of MangachowhkPas encore d'évaluation
- PM: Economy Still GrowingDocument2 pagesPM: Economy Still GrowingchowhkPas encore d'évaluation
- 15 Missing After Boat Loses Contact Off SarawakDocument1 page15 Missing After Boat Loses Contact Off SarawakchowhkPas encore d'évaluation
- Building A SystemDocument24 pagesBuilding A SystemchowhkPas encore d'évaluation
- Radiographic ExposureDocument70 pagesRadiographic ExposurechowhkPas encore d'évaluation
- Key Criteria For Matching Filler Metals To Your Base MaterialDocument3 pagesKey Criteria For Matching Filler Metals To Your Base MaterialchowhkPas encore d'évaluation
- Highlights On ASME Essential VariablesDocument8 pagesHighlights On ASME Essential VariableschowhkPas encore d'évaluation
- Exposure Factors: DR Hussein Ahmed HassanDocument39 pagesExposure Factors: DR Hussein Ahmed HassanchowhkPas encore d'évaluation
- WP11 11 0917 THLDocument19 pagesWP11 11 0917 THLchowhkPas encore d'évaluation
- Piping System Design PhilosophyDocument16 pagesPiping System Design PhilosophychowhkPas encore d'évaluation
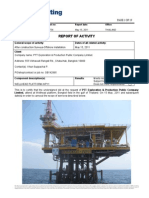
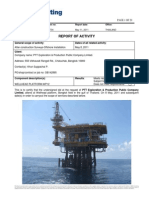
- Report of Activity: General Scope of Activity: Dates of All Related ActivityDocument20 pagesReport of Activity: General Scope of Activity: Dates of All Related ActivitychowhkPas encore d'évaluation
- -Trình duyệt chạy bản HTTP 1.1 -Cũng là phiên bản HTTP 1.1: Wireshark LabDocument3 pages-Trình duyệt chạy bản HTTP 1.1 -Cũng là phiên bản HTTP 1.1: Wireshark LabNam Nguyễn VănPas encore d'évaluation
- Test IT HelpdeskDocument10 pagesTest IT HelpdeskAndreea GeorgianaPas encore d'évaluation
- Multi-WAN Version 1.2.xDocument11 pagesMulti-WAN Version 1.2.xrssebagalaPas encore d'évaluation
- Basic Computer Knowledge Test QuestionsDocument6 pagesBasic Computer Knowledge Test QuestionsVinod Srivastava100% (1)
- BIWTA 6th FL SWDocument4 pagesBIWTA 6th FL SWshams.shiblyPas encore d'évaluation
- 000-PR-002 Rev BDocument24 pages000-PR-002 Rev BRaul Dolo QuinonesPas encore d'évaluation
- MRV Command Reference GuideDocument912 pagesMRV Command Reference GuideManishPas encore d'évaluation
- Plastic Optical Fibers in Access Networks: Procedia Technology December 2014Document8 pagesPlastic Optical Fibers in Access Networks: Procedia Technology December 2014YASSIN AIT OUABBOUPas encore d'évaluation
- How API Gateways Help To Integrate With OAuth Security Models - Part 3Document15 pagesHow API Gateways Help To Integrate With OAuth Security Models - Part 3cobeleulaoPas encore d'évaluation
- Seven Days A Week - Barney Wiki - FandomDocument4 pagesSeven Days A Week - Barney Wiki - FandomchefchadsmithPas encore d'évaluation
- Countries ListDocument4 pagesCountries ListApril WoodsPas encore d'évaluation
- Computer Networks LivroDocument481 pagesComputer Networks LivroTiago Oliveira100% (1)
- Purpcom Task LualhatiDocument2 pagesPurpcom Task LualhatiRae Victorinette LualhatiPas encore d'évaluation
- CCIE 400-101 - 747 QuestionsDocument591 pagesCCIE 400-101 - 747 QuestionsDaniel Olmedo Torres100% (2)
- Getting Started With Winest: Sample Exercise V11Document25 pagesGetting Started With Winest: Sample Exercise V11Perla MartinezPas encore d'évaluation
- Vanet PresentationDocument8 pagesVanet Presentationchaitanya gavitPas encore d'évaluation
- Kali Linux Assuring Security by Penetration Testing Sample ChapterDocument43 pagesKali Linux Assuring Security by Penetration Testing Sample ChapterPackt PublishingPas encore d'évaluation
- Personas - ResumeDocument7 pagesPersonas - Resumeapi-387871360Pas encore d'évaluation
- 2.1-2network Tools and Testing Devices Power PointDocument22 pages2.1-2network Tools and Testing Devices Power Pointecardnyl25100% (1)
- Touchstone 1 Unit 1Document10 pagesTouchstone 1 Unit 1Juan MartínPas encore d'évaluation
- Comtech/EFData CDM-760 ModemDocument4 pagesComtech/EFData CDM-760 ModemarzeszutPas encore d'évaluation
- Dreamweaver Final ExamDocument7 pagesDreamweaver Final ExamDesai MendozaPas encore d'évaluation
- Survey Management System-Revamped VersionDocument10 pagesSurvey Management System-Revamped VersionNeetika AgarwalPas encore d'évaluation
- TG0045en Ed03Document9 pagesTG0045en Ed03nboninaPas encore d'évaluation
- Internet BasicsDocument23 pagesInternet BasicsNurhayati Fakhruzza Binti Sulaiman100% (1)