Vous aimerez peut-être aussi
- Edge Detection PDFDocument12 pagesEdge Detection PDFchaithra580Pas encore d'évaluation
- Edge Detection ProjectDocument22 pagesEdge Detection ProjectJenish Macwan100% (1)
- Multipass Bilateral Filter - CartoonizerDocument18 pagesMultipass Bilateral Filter - CartoonizerNikhil Wakalkar100% (1)
- Use Map EstimationFor Image SharpeningDocument4 pagesUse Map EstimationFor Image SharpeningInternational Organization of Scientific Research (IOSR)Pas encore d'évaluation
- Final Lab ReportDocument7 pagesFinal Lab ReportSyed Hasib1971 AbdullahPas encore d'évaluation
- Dynamic Resolution of Image Edge Detection Technique Among Sobel, Log, and Canny AlgorithmsDocument5 pagesDynamic Resolution of Image Edge Detection Technique Among Sobel, Log, and Canny AlgorithmsijsretPas encore d'évaluation
- Roberts Edge DetectorDocument7 pagesRoberts Edge DetectorNaser MahmoudiPas encore d'évaluation
- Algorithms For Edge DetectionDocument17 pagesAlgorithms For Edge DetectionSudipta RoyPas encore d'évaluation
- Algorithms For Edge Detection: Srikanth Rangarajan 105210122Document17 pagesAlgorithms For Edge Detection: Srikanth Rangarajan 105210122dgonlinePas encore d'évaluation
- Edge Detection Sobel De2 AlteraDocument4 pagesEdge Detection Sobel De2 AlteraParam UttarwarPas encore d'évaluation
- Image Filtering: A Comprehensive StudyDocument46 pagesImage Filtering: A Comprehensive StudyMurali YanamandalaPas encore d'évaluation
- Gradient OperatorDocument5 pagesGradient Operatorchaithra580Pas encore d'évaluation
- Robust Face Recognition Under Difficult Lighting ConditionsDocument4 pagesRobust Face Recognition Under Difficult Lighting ConditionsijecctPas encore d'évaluation
- Study and Comparison of Various Image EdDocument12 pagesStudy and Comparison of Various Image EdSharmin SathiPas encore d'évaluation
- Experiment 5: DigitalDocument3 pagesExperiment 5: DigitalSwarali PurandarePas encore d'évaluation
- Implementation of Medical Image Fusion Using DWT Process On FPGADocument4 pagesImplementation of Medical Image Fusion Using DWT Process On FPGAATSPas encore d'évaluation
- Council For Innovative Research: An Advanced Neural Network Based Method For Noise Removal and Edge DetectionDocument6 pagesCouncil For Innovative Research: An Advanced Neural Network Based Method For Noise Removal and Edge DetectionMay Thet TunPas encore d'évaluation
- 7 IP Expt Smooth Spatial Domain FilteringDocument4 pages7 IP Expt Smooth Spatial Domain FilteringsamarthPas encore d'évaluation
- Assignment-2:DIP: Mr. Victor Mageto CP10101610245Document10 pagesAssignment-2:DIP: Mr. Victor Mageto CP10101610245Vijayendravarma DanduPas encore d'évaluation
- Hardware Implementation of Image Processing Algorithms On FPGADocument4 pagesHardware Implementation of Image Processing Algorithms On FPGAYogeshwar nath singhPas encore d'évaluation
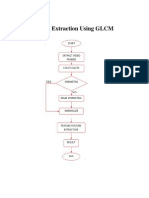
- Feature Extraction Using GLCM (Mamography)Document3 pagesFeature Extraction Using GLCM (Mamography)him1234567890Pas encore d'évaluation
- Comparison of Edge Detectors: Ayaz Akram, Asad IsmailDocument9 pagesComparison of Edge Detectors: Ayaz Akram, Asad IsmailRamSharmaPas encore d'évaluation
- Ijettcs 2014 10 14 66 PDFDocument4 pagesIjettcs 2014 10 14 66 PDFInternational Journal of Application or Innovation in Engineering & ManagementPas encore d'évaluation
- A Survey On Edge Detection Using Different Techniques: Volume 2, Issue 4, April 2013Document5 pagesA Survey On Edge Detection Using Different Techniques: Volume 2, Issue 4, April 2013International Journal of Application or Innovation in Engineering & ManagementPas encore d'évaluation
- Fast Image Blurring Using Lookup Table For RealDocument6 pagesFast Image Blurring Using Lookup Table For RealhimanshubhimaniPas encore d'évaluation
- Sesion 9 10 EdgeDocument12 pagesSesion 9 10 Edgeswarna kuchibhotlaPas encore d'évaluation
- Implementation of Gabor Filter On FPGADocument5 pagesImplementation of Gabor Filter On FPGAfaruk1991Pas encore d'évaluation
- Explain Following Morphological Methods With ExamplesDocument20 pagesExplain Following Morphological Methods With ExamplesMadhawa HulangamuwaPas encore d'évaluation
- CAED Project PDFDocument5 pagesCAED Project PDFUsama AameerPas encore d'évaluation
- Asift AsiftDocument11 pagesAsift AsiftHaris MasoodPas encore d'évaluation
- Watershed Image Segmentation Based On Nonlinear Combination Morphology FilterDocument4 pagesWatershed Image Segmentation Based On Nonlinear Combination Morphology FilterherusyahputraPas encore d'évaluation
- Optimized Edge Detection Algorithm For Face RecognitionDocument4 pagesOptimized Edge Detection Algorithm For Face RecognitionbarkingsimonPas encore d'évaluation
- Contrast Enhancement and Bit Plane SlicingDocument9 pagesContrast Enhancement and Bit Plane SlicingGourab PalPas encore d'évaluation
- Compusoft, 3 (7), 1024-1029 PDFDocument6 pagesCompusoft, 3 (7), 1024-1029 PDFIjact EditorPas encore d'évaluation
- Guided FilterDocument14 pagesGuided Filteroscar saiguaPas encore d'évaluation
- Anti Aliasing: Enhancing Visual Clarity in Computer VisionD'EverandAnti Aliasing: Enhancing Visual Clarity in Computer VisionPas encore d'évaluation
- Research On Wavelet Image Threshold De-Noising: Chenggang Zhen Yingmei SuDocument4 pagesResearch On Wavelet Image Threshold De-Noising: Chenggang Zhen Yingmei SujebileePas encore d'évaluation
- Xilinx System Generator PDFDocument15 pagesXilinx System Generator PDFDr-Atul Kumar DwivediPas encore d'évaluation
- Problem Statement 40Document8 pagesProblem Statement 40Let see With positivePas encore d'évaluation
- Image Compression Using DCTDocument10 pagesImage Compression Using DCTSivaranjan Goswami100% (1)
- Edge Detectors: Deptofcs& EDocument26 pagesEdge Detectors: Deptofcs& Eishant7890Pas encore d'évaluation
- Image Coding ZeroDocument28 pagesImage Coding Zeropraveenpv7Pas encore d'évaluation
- DSP Exp 10 StudentDocument4 pagesDSP Exp 10 StudentCaptain Jack SparrowPas encore d'évaluation
- Homomorphic FilteringDocument5 pagesHomomorphic Filteringadc gamblPas encore d'évaluation
- Improved Edge Detection Using Variable Thresholding Technique and Convolution of Gabor With Gaussian FiltersDocument15 pagesImproved Edge Detection Using Variable Thresholding Technique and Convolution of Gabor With Gaussian FilterssipijPas encore d'évaluation
- International Journal of Image Processing (IJIP)Document65 pagesInternational Journal of Image Processing (IJIP)AI Coordinator - CSC JournalsPas encore d'évaluation
- Design and Implementation: 3.1 MorphologyDocument29 pagesDesign and Implementation: 3.1 Morphologyvijay bPas encore d'évaluation
- Scale Invariant Feature Transform: Unveiling the Power of Scale Invariant Feature Transform in Computer VisionD'EverandScale Invariant Feature Transform: Unveiling the Power of Scale Invariant Feature Transform in Computer VisionPas encore d'évaluation
- Robot Vision, Image Processing and Analysis: Sumit Mane (162110017) Akhilesh Gupta (162110001) Kunal Karnik (162110013)Document69 pagesRobot Vision, Image Processing and Analysis: Sumit Mane (162110017) Akhilesh Gupta (162110001) Kunal Karnik (162110013)Sanjay DolarePas encore d'évaluation
- Final Project Report: Author: Ying Li Course: Computer For Imaging ScienceDocument23 pagesFinal Project Report: Author: Ying Li Course: Computer For Imaging ScienceZulqarnain HaiderPas encore d'évaluation
- Varied-Sphere Periphery-Sentient Twin UtilizationDocument4 pagesVaried-Sphere Periphery-Sentient Twin UtilizationInternational Journal of Application or Innovation in Engineering & ManagementPas encore d'évaluation
- 05.an Improved Segmentation of High Spatial Resolution Remote Sensing ImageDocument5 pages05.an Improved Segmentation of High Spatial Resolution Remote Sensing ImagebudiPas encore d'évaluation
- Paper 3Document11 pagesPaper 3irjmssPas encore d'évaluation
- 022 BolecekDocument8 pages022 BolecekIEEE Projects BengaluruPas encore d'évaluation
- DSP Project ExampleDocument24 pagesDSP Project ExampleAMIT KUMAR PANDAPas encore d'évaluation
- A Fast Image Sharpness Algorithm ImplementationDocument6 pagesA Fast Image Sharpness Algorithm ImplementationijosatPas encore d'évaluation
- Object Detection and Shadow Removal From Video StreamDocument10 pagesObject Detection and Shadow Removal From Video StreamPaolo PinoPas encore d'évaluation
- Iterated Graph Cuts For Image SegmentationDocument10 pagesIterated Graph Cuts For Image Segmentationankit407Pas encore d'évaluation
- Gabor FilterDocument9 pagesGabor Filterjohn_puppy31100% (1)
- A1f03paper 5Document16 pagesA1f03paper 5Zeeshan Hyder BhattiPas encore d'évaluation
- A Simple Explanation of Effective Asset Management: Senior Asset & Engineering Consultant IngeniaDocument16 pagesA Simple Explanation of Effective Asset Management: Senior Asset & Engineering Consultant IngeniaZeeshan Hyder BhattiPas encore d'évaluation
- Business Process Reengineering On High Education Institutions - An Integrative Approach of Enterprise Architecture and Service Design MethodsDocument120 pagesBusiness Process Reengineering On High Education Institutions - An Integrative Approach of Enterprise Architecture and Service Design MethodsZeeshan Hyder BhattiPas encore d'évaluation
- Ajmse20187 2-13Document9 pagesAjmse20187 2-13Zeeshan Hyder BhattiPas encore d'évaluation
- Research On Process Reengineering of University Financial System Based On "Big Data" + "Cloud Computing"Document6 pagesResearch On Process Reengineering of University Financial System Based On "Big Data" + "Cloud Computing"Zeeshan Hyder BhattiPas encore d'évaluation
- Excel 2016 Vba ProgrammingDocument118 pagesExcel 2016 Vba ProgrammingZeeshan Hyder Bhatti67% (3)
- Mixed Methods in Finance ResearchDocument30 pagesMixed Methods in Finance ResearchZeeshan Hyder BhattiPas encore d'évaluation
- University of Sindh Internal Departmental Audit Schedule 2020Document4 pagesUniversity of Sindh Internal Departmental Audit Schedule 2020Zeeshan Hyder BhattiPas encore d'évaluation
- Quantitative and Qualitative Research in FinanceDocument18 pagesQuantitative and Qualitative Research in FinanceZeeshan Hyder BhattiPas encore d'évaluation
- Business Process Portfolio Selection in Re-Engineering ProjectsDocument25 pagesBusiness Process Portfolio Selection in Re-Engineering ProjectsZeeshan Hyder BhattiPas encore d'évaluation
- Frameworks For Understanding Business Process Re-EngineeringDocument13 pagesFrameworks For Understanding Business Process Re-EngineeringZeeshan Hyder BhattiPas encore d'évaluation
- Employee Payroll System ProjectDocument21 pagesEmployee Payroll System ProjectZeeshan Hyder BhattiPas encore d'évaluation
- Revised Budqet ForDocument4 pagesRevised Budqet ForZeeshan Hyder BhattiPas encore d'évaluation
- Monthly Blood Pressure Log Excel TemplateDocument8 pagesMonthly Blood Pressure Log Excel TemplateZeeshan Hyder Bhatti100% (1)
- University of Sindh Internal Departmental Audit Schedule 2020Document4 pagesUniversity of Sindh Internal Departmental Audit Schedule 2020Zeeshan Hyder BhattiPas encore d'évaluation
- M.A Thesis Title: S. # Researcher Title YearDocument4 pagesM.A Thesis Title: S. # Researcher Title YearZeeshan Hyder BhattiPas encore d'évaluation
- An Overview of Sociology As A Discipline in Pakistan: Challenges and OpportunitiesDocument15 pagesAn Overview of Sociology As A Discipline in Pakistan: Challenges and OpportunitiesZeeshan Hyder BhattiPas encore d'évaluation
- 2001 Shsop 0131Document18 pages2001 Shsop 0131Zeeshan Hyder BhattiPas encore d'évaluation
- Realistic 3D Computer Model of The Gerbil Middle Ear, Featuring Accurate Morphology of Bone and Soft Tissue StructuresDocument41 pagesRealistic 3D Computer Model of The Gerbil Middle Ear, Featuring Accurate Morphology of Bone and Soft Tissue StructuresZeeshan Hyder BhattiPas encore d'évaluation
- Sociology As A Discipline in Pakistan: Challenges and OpportunitiesDocument27 pagesSociology As A Discipline in Pakistan: Challenges and OpportunitiesZeeshan Hyder BhattiPas encore d'évaluation
- Student-Centered and Constructivist Approaches To InstructionDocument27 pagesStudent-Centered and Constructivist Approaches To InstructionZeeshan Hyder BhattiPas encore d'évaluation
- 09 Ph. D. Scheme of StudiesDocument2 pages09 Ph. D. Scheme of StudiesZeeshan Hyder BhattiPas encore d'évaluation
- Intruder PerformaDocument1 pageIntruder PerformaZeeshan Hyder BhattiPas encore d'évaluation
- Biometric CodeDocument8 pagesBiometric CodeZeeshan Hyder BhattiPas encore d'évaluation
- Edge Based SegmentationDocument4 pagesEdge Based SegmentationZeeshan Hyder BhattiPas encore d'évaluation
- Scheme of Studies For B.Ed / M.A Education (Previous) (Morning/Evening) REGULAR PROGRAMME SPRING 2015Document3 pagesScheme of Studies For B.Ed / M.A Education (Previous) (Morning/Evening) REGULAR PROGRAMME SPRING 2015Zeeshan Hyder BhattiPas encore d'évaluation
- EGIL DS en V03 PDFDocument7 pagesEGIL DS en V03 PDFKheireddine AounallahPas encore d'évaluation
- Freebitco - in Script MULTIPLY BTC BONUS 2020Document2 pagesFreebitco - in Script MULTIPLY BTC BONUS 2020Mohammadreza EmamiPas encore d'évaluation
- Exercises 1 Systems of Linear Equations, MatricesDocument2 pagesExercises 1 Systems of Linear Equations, MatricesNgô Anh TúPas encore d'évaluation
- Juliet SlidesCarnivalDocument27 pagesJuliet SlidesCarnivalSarahiH.ReyesPas encore d'évaluation
- Pandit Deendayal Energy University School of Technology: 21BCP430D Pranjal M. PatelDocument42 pagesPandit Deendayal Energy University School of Technology: 21BCP430D Pranjal M. PatelDevasya PatelPas encore d'évaluation
- Biological Science 6th Edition Freeman Test BankDocument21 pagesBiological Science 6th Edition Freeman Test Bankagleamamusable.pwclcq100% (28)
- Introduction To Generative AI - Post Quiz - Attempt ReviewDocument4 pagesIntroduction To Generative AI - Post Quiz - Attempt Reviewvinay MurakambattuPas encore d'évaluation
- CSE101 Computer Programming: Lecture #0Document28 pagesCSE101 Computer Programming: Lecture #0t iwariPas encore d'évaluation
- Current Mode Bandgap ReferenceDocument22 pagesCurrent Mode Bandgap ReferenceSovan GhoshPas encore d'évaluation
- CAPM Exam Prep WorkbookDocument50 pagesCAPM Exam Prep WorkbookMohammad Jaradeh100% (5)
- DM-HROD-2021-0340 Central Office Learning and Development Program COLDP Program Offerings For DepEd CO Personnel1Document2 pagesDM-HROD-2021-0340 Central Office Learning and Development Program COLDP Program Offerings For DepEd CO Personnel1Nestor DawatonPas encore d'évaluation
- Allegro PCB Editor User Guide: Preparing Manufacturing Data: Product Version 16.0 June 2007Document132 pagesAllegro PCB Editor User Guide: Preparing Manufacturing Data: Product Version 16.0 June 2007a_damrongPas encore d'évaluation
- BTC Mining - Google AramaDocument1 pageBTC Mining - Google AramaSuli Mrmassb0% (1)
- CMT Eh15Document50 pagesCMT Eh15Eletrônica Maia Comércio e ServiçosPas encore d'évaluation
- Security Awareness Training: Security Is Everyone's ResponsibilityDocument21 pagesSecurity Awareness Training: Security Is Everyone's ResponsibilityHemant DusanePas encore d'évaluation
- Harbinger VARI 4000 Series Owner ManualDocument20 pagesHarbinger VARI 4000 Series Owner ManualAbel AmadorPas encore d'évaluation
- Transformer Monitoring Systems - MRDocument4 pagesTransformer Monitoring Systems - MRKelly chatingPas encore d'évaluation
- Eco Exercise 3answer Ans 1Document8 pagesEco Exercise 3answer Ans 1Glory PrintingPas encore d'évaluation
- Course OutlineDocument13 pagesCourse OutlineRaffPas encore d'évaluation
- ReadmeDocument60 pagesReadmetimur_okPas encore d'évaluation
- Interview Qs On r12 p2pDocument15 pagesInterview Qs On r12 p2pAmitPradhanPas encore d'évaluation
- Optimization: 1 MotivationDocument20 pagesOptimization: 1 MotivationSCRBDusernmPas encore d'évaluation
- Departmental Models 641a UpgradeDocument13 pagesDepartmental Models 641a UpgradeKrish NarajPas encore d'évaluation
- JP New Poster 2023Document1 pageJP New Poster 2023JAI PRAKASH KUSHWAHPas encore d'évaluation
- Theories & Practices in Local GovernanceDocument21 pagesTheories & Practices in Local GovernanceLindsey MariePas encore d'évaluation
- Amplify Alarms, Wakelocks and ServicesDocument40 pagesAmplify Alarms, Wakelocks and Servicesdejvi123100% (1)
- File PDF 3MB PDFDocument77 pagesFile PDF 3MB PDFErwin HidayatullahPas encore d'évaluation
- Sepam Protokol IEC 60870-5-103 Seped305002en PDFDocument44 pagesSepam Protokol IEC 60870-5-103 Seped305002en PDFApril AustinPas encore d'évaluation
- DimensioningDocument14 pagesDimensioningpaulo_rieloffPas encore d'évaluation
- 2.2 BA ZC426 RTA Apache ZooKeeperDocument24 pages2.2 BA ZC426 RTA Apache ZooKeeperPrasanth TarikoppadPas encore d'évaluation