Vous aimerez peut-être aussi
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Master Books ListDocument32 pagesMaster Books ListfhaskellPas encore d'évaluation
- Multiple Linear RegressionDocument26 pagesMultiple Linear RegressionMarlene G Padigos100% (2)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Introduction To Public HealthDocument54 pagesIntroduction To Public HealthKristelle Marie Enanoria Bardon50% (2)
- (Abhijit Champanerkar, Oliver Dasbach, Efstratia K (B-Ok - Xyz)Document273 pages(Abhijit Champanerkar, Oliver Dasbach, Efstratia K (B-Ok - Xyz)gogPas encore d'évaluation
- Understanding Ui-Ux-By Harry Muksit - SDocument109 pagesUnderstanding Ui-Ux-By Harry Muksit - Sgodzalli44100% (1)
- SDR HW 1Document2 pagesSDR HW 1UAkron EngineerPas encore d'évaluation
- Homework #3 NameDocument28 pagesHomework #3 NameUAkron EngineerPas encore d'évaluation
- Examples FluidsI Fall 2015Document2 pagesExamples FluidsI Fall 2015UAkron EngineerPas encore d'évaluation
- Examples FluidsI 10-22-2015Document8 pagesExamples FluidsI 10-22-2015UAkron EngineerPas encore d'évaluation
- Kinematics Exam 1 RetakeDocument4 pagesKinematics Exam 1 RetakeUAkron EngineerPas encore d'évaluation
- Mathematics Trial SPM 2015 P2 Bahagian BDocument2 pagesMathematics Trial SPM 2015 P2 Bahagian BPauling ChiaPas encore d'évaluation
- NetStumbler Guide2Document3 pagesNetStumbler Guide2Maung Bay0% (1)
- Chapter 12 NotesDocument4 pagesChapter 12 NotesIvanTh3Great100% (6)
- Public Service Media in The Networked Society Ripe 2017 PDFDocument270 pagesPublic Service Media in The Networked Society Ripe 2017 PDFTriszt Tviszt KapitányPas encore d'évaluation
- Oda A La InmortalidadDocument7 pagesOda A La InmortalidadEmy OoTeam ClésPas encore d'évaluation
- 2,3,5 Aqidah Dan QHDocument5 pages2,3,5 Aqidah Dan QHBang PaingPas encore d'évaluation
- 2022 Drik Panchang Hindu FestivalsDocument11 pages2022 Drik Panchang Hindu FestivalsBikash KumarPas encore d'évaluation
- Genpact - Job Description - One Data and AI - B Tech Circuit and MCA (3) 2Document4 pagesGenpact - Job Description - One Data and AI - B Tech Circuit and MCA (3) 2SHIVANSH SRIVASTAVA (RA2011053010013)Pas encore d'évaluation
- The Idea of Multiple IntelligencesDocument2 pagesThe Idea of Multiple IntelligencesSiti AisyahPas encore d'évaluation
- Quadrotor UAV For Wind Profile Characterization: Moyano Cano, JavierDocument85 pagesQuadrotor UAV For Wind Profile Characterization: Moyano Cano, JavierJuan SebastianPas encore d'évaluation
- Arctic Beacon Forbidden Library - Winkler-The - Thousand - Year - Conspiracy PDFDocument196 pagesArctic Beacon Forbidden Library - Winkler-The - Thousand - Year - Conspiracy PDFJames JohnsonPas encore d'évaluation
- Accountancy Department: Preliminary Examination in MANACO 1Document3 pagesAccountancy Department: Preliminary Examination in MANACO 1Gracelle Mae Oraller0% (1)
- Stockholm KammarbrassDocument20 pagesStockholm KammarbrassManuel CoitoPas encore d'évaluation
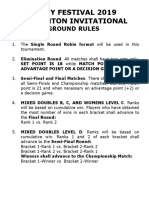
- Ground Rules 2019Document3 pagesGround Rules 2019Jeremiah Miko LepasanaPas encore d'évaluation
- Operations Management (Scheduling) PDFDocument4 pagesOperations Management (Scheduling) PDFVijay Singh ThakurPas encore d'évaluation
- TOPIC I: Moral and Non-Moral ProblemsDocument6 pagesTOPIC I: Moral and Non-Moral ProblemsHaydee Christine SisonPas encore d'évaluation
- MOA Agri BaseDocument6 pagesMOA Agri BaseRodj Eli Mikael Viernes-IncognitoPas encore d'évaluation
- Diabetes & Metabolic Syndrome: Clinical Research & ReviewsDocument3 pagesDiabetes & Metabolic Syndrome: Clinical Research & ReviewspotatoPas encore d'évaluation
- Bab 3 - Soal-Soal No. 4 SD 10Document4 pagesBab 3 - Soal-Soal No. 4 SD 10Vanni LimPas encore d'évaluation
- De La Salle Araneta University Grading SystemDocument2 pagesDe La Salle Araneta University Grading Systemnicolaus copernicus100% (2)
- The Music of OhanaDocument31 pagesThe Music of OhanaSquaw100% (3)
- WPhO (Singapore) - World Physics Olympiad (WPhO) - 2011Document20 pagesWPhO (Singapore) - World Physics Olympiad (WPhO) - 2011GXGGXG50% (2)
- A New Cloud Computing Governance Framework PDFDocument8 pagesA New Cloud Computing Governance Framework PDFMustafa Al HassanPas encore d'évaluation
- Sucesos de Las Islas Filipinas PPT Content - Carlos 1Document2 pagesSucesos de Las Islas Filipinas PPT Content - Carlos 1A Mi YaPas encore d'évaluation
- Literature Review On Catfish ProductionDocument5 pagesLiterature Review On Catfish Productionafmzyodduapftb100% (1)