Vous aimerez peut-être aussi
- Lindsey La Profesional de SIG: Lindsey the GIS ProfessionalD'EverandLindsey La Profesional de SIG: Lindsey the GIS ProfessionalPas encore d'évaluation
- LIDAR: Detección remota con láserDocument6 pagesLIDAR: Detección remota con láserTania BarriosPas encore d'évaluation
- Avance LidarDocument8 pagesAvance LidarGiancarloIrazábalUribePas encore d'évaluation
- 11 Prersent Radar Lidar Ndvi Otros IndicesDocument56 pages11 Prersent Radar Lidar Ndvi Otros IndicesDAYANPas encore d'évaluation
- Qué Es La Tecnología LIDARDocument15 pagesQué Es La Tecnología LIDARLorena Gonzalez100% (1)
- Sistema LidarDocument2 pagesSistema LidarDicson Campos100% (2)
- Sistema LIDAR ResumenDocument4 pagesSistema LIDAR ResumenJk MoriartyPas encore d'évaluation
- Scanner Laser y Lidar - ParteDocument7 pagesScanner Laser y Lidar - ParteApex gamerPas encore d'évaluation
- Tecnología LidarDocument17 pagesTecnología LidarReynaldo Baldini100% (1)
- Envi Avanzado Sesion 1 Integración de Envi y Arcgis-ManualDocument13 pagesEnvi Avanzado Sesion 1 Integración de Envi y Arcgis-ManualFausto Pedro Mendoza VeraPas encore d'évaluation
- LIDARDocument10 pagesLIDARRocio Conislla100% (1)
- LIDARDocument11 pagesLIDARMilton Willy Choquehuanca Tarqui100% (1)
- Topografia InvestigacionDocument3 pagesTopografia InvestigacionAnderson CoilaPas encore d'évaluation
- Sensor LidarDocument23 pagesSensor LidarAndres Ruz AfrrPas encore d'évaluation
- LidarDocument24 pagesLidarJames AguirrePas encore d'évaluation
- LIDAR InformeDocument19 pagesLIDAR InformeCarolina PastenesPas encore d'évaluation
- LIDARDocument18 pagesLIDARcristhianPas encore d'évaluation
- LiDAR y drones para topografía y modelado 3DDocument21 pagesLiDAR y drones para topografía y modelado 3DViiyo Orozco0% (1)
- LIIDARDocument2 pagesLIIDARElias SeguielPas encore d'évaluation
- LiDAR y SoDARDocument5 pagesLiDAR y SoDARCarlos Chemo Molina TiradoPas encore d'évaluation
- Topografia 2Document24 pagesTopografia 2Jherson Cardenas ZevallosPas encore d'évaluation
- Sistema LidarDocument8 pagesSistema Lidarjostar200158Pas encore d'évaluation
- Tipos de LIDAR para DEMDocument4 pagesTipos de LIDAR para DEMSAUL LUJANPas encore d'évaluation
- Articulo Sensores LidarDocument5 pagesArticulo Sensores LidarJaime Flores maldonadoPas encore d'évaluation
- Sistema LidarDocument6 pagesSistema LidarAna M GomezPas encore d'évaluation
- Tarea LidarDocument4 pagesTarea LidarBryanLopezLagosPas encore d'évaluation
- 131-Texto Del Artículo-239-1-10-20190122Document8 pages131-Texto Del Artículo-239-1-10-20190122Jose Daniel de CastroPas encore d'évaluation
- Tarea 10 de Geodesia, EricaDocument8 pagesTarea 10 de Geodesia, EricaErica Hernández AlvaradoPas encore d'évaluation
- Asignacion #10Document6 pagesAsignacion #10Jhon manuel PeñaPas encore d'évaluation
- Cuestionario LidarDocument1 pageCuestionario LidarmarcelaPas encore d'évaluation
- UNIVERSIDAD ABIERTA PARA ADULTOS Asignación LidarDocument7 pagesUNIVERSIDAD ABIERTA PARA ADULTOS Asignación LidarSanty OrtizPas encore d'évaluation
- LidarDocument3 pagesLidarAnderson Jiménez RosarioPas encore d'évaluation
- Resumen Trabajos Académicos Lidar y Scaner Láser 3DDocument8 pagesResumen Trabajos Académicos Lidar y Scaner Láser 3DMélido Rafael Méndez CalcañoPas encore d'évaluation
- El Sistema LIDARDocument3 pagesEl Sistema LIDARWill QuentaPas encore d'évaluation
- Capacitacion LidarDocument28 pagesCapacitacion LidarJaps Ingeniería Ingeniería Topografía100% (1)
- Sensor LidarDocument34 pagesSensor LidarSAUL LUJANPas encore d'évaluation
- Sensor LidarDocument15 pagesSensor Lidarhenri salPas encore d'évaluation
- Levantamiento Por Imágen SatelitalDocument11 pagesLevantamiento Por Imágen SatelitalJuanPabloPérezMartel100% (1)
- Exposicion Lidar - FernandoDocument9 pagesExposicion Lidar - FernandoFernando Quispe AlbinoPas encore d'évaluation
- LidarDocument14 pagesLidarNico PirachicanPas encore d'évaluation
- Fundamentos de RadarDocument17 pagesFundamentos de RadarJULIO CÉSAR BENAVIDES HERNÁNDEZPas encore d'évaluation
- Tecnología LidarDocument4 pagesTecnología LidarKika Cortes GalleguillosPas encore d'évaluation
- Sistemas LidarDocument4 pagesSistemas LidarPedro Cobaxin BaxinPas encore d'évaluation
- Investigacion Sobre Los Sistemas LidarDocument3 pagesInvestigacion Sobre Los Sistemas LidarPedro Cobaxin BaxinPas encore d'évaluation
- Teledetección y FotogrametríaDocument5 pagesTeledetección y FotogrametríaLIDIA ASENSIO ANIORTEPas encore d'évaluation
- Trabajo LIDARDocument14 pagesTrabajo LIDARJenny AlvarezPas encore d'évaluation
- Levantamientos LiDARDocument15 pagesLevantamientos LiDARYohell AlfaroPas encore d'évaluation
- LaikarDocument3 pagesLaikarBryanLopezLagosPas encore d'évaluation
- Aster ConceptosDocument5 pagesAster ConceptosJuan Luis MorrisonPas encore d'évaluation
- Scan 3 DDocument8 pagesScan 3 DDavolstenholmePas encore d'évaluation
- Parte 2 SigDocument6 pagesParte 2 Sigdiana csPas encore d'évaluation
- Grupo 07 - Equipo 02 - Escáner Láser y LIDARDocument18 pagesGrupo 07 - Equipo 02 - Escáner Láser y LIDARGiancarlo LajoPas encore d'évaluation
- Principios Físicos de La TeledetecciónDocument12 pagesPrincipios Físicos de La TeledetecciónJohan Orellana0% (1)
- Ingenieria Civil - Aplicaciones LiDARDocument15 pagesIngenieria Civil - Aplicaciones LiDARDerrick Boza CarbonelliPas encore d'évaluation
- Trabajo FinalDocument5 pagesTrabajo FinalSanto Santana RPas encore d'évaluation
- Figura 1 LIDAR coche autónomoDocument3 pagesFigura 1 LIDAR coche autónomoRaúl IglesiasPas encore d'évaluation
- Practica 7 (Autoguardado)Document18 pagesPractica 7 (Autoguardado)mijaelPas encore d'évaluation
- Topo 2 InformeDocument40 pagesTopo 2 InformeJerinson J Polanco ZamudioPas encore d'évaluation
- Presentacion LidarDocument17 pagesPresentacion LidarDiego LopezPas encore d'évaluation
- P12a Universidades - Terminal Andrés Sanín - Centro EmpresaDocument1 pageP12a Universidades - Terminal Andrés Sanín - Centro EmpresaAndrés MayorgaPas encore d'évaluation
- Guía de Servicios SITM - MIODocument108 pagesGuía de Servicios SITM - MIOAndrés MayorgaPas encore d'évaluation
- IMPLEMENTACION SITP Junio 2013 AvanceDocument27 pagesIMPLEMENTACION SITP Junio 2013 AvanceCM35Pas encore d'évaluation
- Vinculoalimentadoras 26Document1 pageVinculoalimentadoras 26Andrés MayorgaPas encore d'évaluation
- Plano Ubicación Estación Avenida Cali Enero 2013Document1 pagePlano Ubicación Estación Avenida Cali Enero 2013Andrés MayorgaPas encore d'évaluation
- 1 Agosto-Tarifas SITP-volanteDocument1 page1 Agosto-Tarifas SITP-volanteAndrés MayorgaPas encore d'évaluation
- Ruta Alimentadora - Horarios Enero 2013Document1 pageRuta Alimentadora - Horarios Enero 2013Andrés MayorgaPas encore d'évaluation
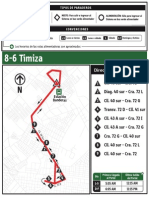
- Bus Alimentador 8-6 TIMIZADocument1 pageBus Alimentador 8-6 TIMIZAYayitaYepesPas encore d'évaluation
- Avenida CaliDocument1 pageAvenida CaliAndrés MayorgaPas encore d'évaluation
- Presentación para El Foro Bogotá Siempre Gana Con El SITP - Camara de Comercio de Bogotá 4 de Julio de 2013Document68 pagesPresentación para El Foro Bogotá Siempre Gana Con El SITP - Camara de Comercio de Bogotá 4 de Julio de 2013Andrés MayorgaPas encore d'évaluation
- Vinculo Rutas AlimentadorasDocument1 pageVinculo Rutas AlimentadorasAndrés MayorgaPas encore d'évaluation
- 06 AmericasDocument1 page06 AmericasAndrés MayorgaPas encore d'évaluation
- 2 - 6 Volante RGBDocument1 page2 - 6 Volante RGBAndrés MayorgaPas encore d'évaluation
- Volante - CAN (1 de SeptiembreDocument1 pageVolante - CAN (1 de SeptiembreAndrés MayorgaPas encore d'évaluation
- Cálculo y diseño de una línea eléctrica de alta tensión y centro de transformaciónDocument93 pagesCálculo y diseño de una línea eléctrica de alta tensión y centro de transformaciónSiul VegaPas encore d'évaluation
- Calendario Académico 2020-III PDFDocument11 pagesCalendario Académico 2020-III PDFVladimir Alejandro Ariza MontañezPas encore d'évaluation
- Diseño, Interventoria Y Costos en El Desarrollo de Proyectos ElectricosDocument134 pagesDiseño, Interventoria Y Costos en El Desarrollo de Proyectos ElectricosIsaias VillamizarPas encore d'évaluation
- Presentacion Metro - Zona 5Document149 pagesPresentacion Metro - Zona 5Alexander WalkerPas encore d'évaluation
- Cálculo de cablesDocument30 pagesCálculo de cablesCarlos BenavidesPas encore d'évaluation
- Estudio PrevioDocument73 pagesEstudio PrevioAndrés MayorgaPas encore d'évaluation
- MicroStation 8Document922 pagesMicroStation 8jorgemosquete50% (2)
- Anexo 1 - Anexo Técnico.Document54 pagesAnexo 1 - Anexo Técnico.Andrés MayorgaPas encore d'évaluation
- Aplicación del LIDAR al estudio de la cubierta vegetalDocument6 pagesAplicación del LIDAR al estudio de la cubierta vegetalAndrés MayorgaPas encore d'évaluation
- Anexo 1 - Anexo Técnico - 5-AGO-19Document34 pagesAnexo 1 - Anexo Técnico - 5-AGO-19Andrés MayorgaPas encore d'évaluation
- Especificaciones Tecnicas Cartografia Basicas IGAC PDFDocument94 pagesEspecificaciones Tecnicas Cartografia Basicas IGAC PDFprueba100% (1)
- Cálculo de Líneas Eléctricas Con Andelec - ESTUDIO DE LAS SOBRECARGAS QUE ACTÚAN SOBRE EL CONDUCTOR DE UNA LÍNEA ELÉCTRICA AÉREA CON CONDUCTORES DESNUDOS PDFDocument6 pagesCálculo de Líneas Eléctricas Con Andelec - ESTUDIO DE LAS SOBRECARGAS QUE ACTÚAN SOBRE EL CONDUCTOR DE UNA LÍNEA ELÉCTRICA AÉREA CON CONDUCTORES DESNUDOS PDFAndrés MayorgaPas encore d'évaluation
- Taller práctico sobre la NTC 5661Document35 pagesTaller práctico sobre la NTC 5661Andrés MayorgaPas encore d'évaluation
- Catalogo Representacion 2k v1.0 PDFDocument150 pagesCatalogo Representacion 2k v1.0 PDFRecording HacksPas encore d'évaluation
- Dialnet DeterminacionDeVariablesForestalesDeMasaYDeArboles 41614Document342 pagesDialnet DeterminacionDeVariablesForestalesDeMasaYDeArboles 41614Andrés MayorgaPas encore d'évaluation
- Revista de Topografía AzimutDocument8 pagesRevista de Topografía AzimutAndrés MayorgaPas encore d'évaluation
- Modelo Registro Productos FitosanitariosDocument5 pagesModelo Registro Productos FitosanitariosCultivo del AlmendroPas encore d'évaluation
- Presentacion Pisos de Madera CrisDocument108 pagesPresentacion Pisos de Madera CrisGean Pierre RiosPas encore d'évaluation
- Ojetivos Octavo MartesDocument8 pagesOjetivos Octavo MartesFernanda Miranda AureaPas encore d'évaluation
- Reconstrucción en La Filosofía - John DeweyDocument208 pagesReconstrucción en La Filosofía - John DeweyJuan Pablo Vargas BeltránPas encore d'évaluation
- Antología 02 Admon. de Oper. IIDocument181 pagesAntología 02 Admon. de Oper. IIVanessa LizettePas encore d'évaluation
- Sea Por Siempre Ensalzado El Santo Nombre Del Supremo CreadorDocument2 pagesSea Por Siempre Ensalzado El Santo Nombre Del Supremo Creadorluis naranjo100% (1)
- Linea de TiempoDocument3 pagesLinea de TiempoSol Escobar 68657119Pas encore d'évaluation
- Orden CerradoDocument44 pagesOrden CerradoOmar Alex Apaza MarcaPas encore d'évaluation
- Prob 7Document3 pagesProb 7Ciph UnacPas encore d'évaluation
- Libro Consulta de Puericultura 20111Document77 pagesLibro Consulta de Puericultura 20111Luis Reynaga JimenezPas encore d'évaluation
- Maya Cartonera - 20 Poetas ChiapanecasDocument70 pagesMaya Cartonera - 20 Poetas ChiapanecasnoirukaPas encore d'évaluation
- Guia de Discusion 3 Ley de Gauss Fir315Document14 pagesGuia de Discusion 3 Ley de Gauss Fir315Nelson Ricardo Solito Palma0% (2)
- La Quema de CombustiblesDocument14 pagesLa Quema de CombustiblesLenin Yasig100% (1)
- Administracion de MantenimientoDocument86 pagesAdministracion de MantenimientoIan Raúl Izquierdo RamónPas encore d'évaluation
- Preguntas de Cultura GeneralDocument17 pagesPreguntas de Cultura GeneralAlejandro Cepeda67% (3)
- Unidad Educativa Franciscana San AntonioDocument23 pagesUnidad Educativa Franciscana San Antoniomajo arellanoPas encore d'évaluation
- EXPOSICIONDocument13 pagesEXPOSICIONZulma ZlmPas encore d'évaluation
- B ESCALA DE ASIADocument12 pagesB ESCALA DE ASIAoriana vizzarroPas encore d'évaluation
- PRACTICAS LIBRO DE LETRAS COMPLETO OK-with-numbers PDFDocument230 pagesPRACTICAS LIBRO DE LETRAS COMPLETO OK-with-numbers PDFTaryPas encore d'évaluation
- Modulo de Ingles Semana Del 5 Al 9 de Junio 1C y 1DDocument6 pagesModulo de Ingles Semana Del 5 Al 9 de Junio 1C y 1DSnaidersnilPas encore d'évaluation
- Coeficiente de Partición N-OctanolDocument7 pagesCoeficiente de Partición N-OctanolBrendagomez25Pas encore d'évaluation
- Resolución Expresión BooleanaDocument2 pagesResolución Expresión BooleanaserolfitnasPas encore d'évaluation
- Señalización de Riesgos Presentes en La Industria Petrolera, Del Servicio de Coiled TubingDocument27 pagesSeñalización de Riesgos Presentes en La Industria Petrolera, Del Servicio de Coiled TubingArturoPas encore d'évaluation
- Cuadro Sinóptico en BlancoDocument1 pageCuadro Sinóptico en BlancoCARLOS DE DIEGO MOSQUERAPas encore d'évaluation
- La Esperanza Evita Que Nuestro Barco Zozobre PDFDocument4 pagesLa Esperanza Evita Que Nuestro Barco Zozobre PDFReflexiones Cristianas De EsperanzaPas encore d'évaluation
- Unidad de transmisión T20-25AP/SP/SPBDocument296 pagesUnidad de transmisión T20-25AP/SP/SPBRicardoPas encore d'évaluation
- Condensacion de La Cromatina AdnDocument3 pagesCondensacion de La Cromatina AdnDiego De La TorrePas encore d'évaluation
- Cengel Capitulo+7Document48 pagesCengel Capitulo+7VDPas encore d'évaluation
- Gestión Responsable de La Innovación (Mapa Conceptual) - JLDocument1 pageGestión Responsable de La Innovación (Mapa Conceptual) - JLJorge Eduardo Loayza Pérez100% (2)
- RODARI, Gianni. Gramática de La Fantasía. Introducción Al Arte de Inventar Historias. Ed. ArgosDocument27 pagesRODARI, Gianni. Gramática de La Fantasía. Introducción Al Arte de Inventar Historias. Ed. ArgosLoli MelulPas encore d'évaluation