Vous aimerez peut-être aussi
- Vibraciones Libres No AmortiguadasDocument41 pagesVibraciones Libres No AmortiguadasFranklin Argandoña PérezPas encore d'évaluation
- Matrices Ortogonales DiagonalizacionDocument7 pagesMatrices Ortogonales DiagonalizacionFranco ComasPas encore d'évaluation
- Cálculo Analítico de Modos y Frecuencias de VibrarDocument21 pagesCálculo Analítico de Modos y Frecuencias de VibrarAlbertoSalgadoRPas encore d'évaluation
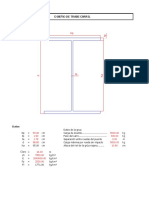
- Trabe CarrilDocument11 pagesTrabe CarrilCristhian Alfonso Mandujano PérezPas encore d'évaluation
- TEMA 03 - El OleajeDocument8 pagesTEMA 03 - El OleajeEduardo Garcia100% (1)
- Dipositivas Multiples Grados de LibertadDocument26 pagesDipositivas Multiples Grados de LibertadCarolina Franco ArizaPas encore d'évaluation
- IT - Dinámica de Sistemas de 1 Grado de LibertadDocument38 pagesIT - Dinámica de Sistemas de 1 Grado de LibertadAlexander BVPas encore d'évaluation
- Analisis de Estructura de Un Grado de LibertadDocument131 pagesAnalisis de Estructura de Un Grado de LibertadHarry Alejandro Pineda PadillaPas encore d'évaluation
- Ecuación de Cuarto GradoDocument8 pagesEcuación de Cuarto GradoLuis RojasPas encore d'évaluation
- Lecciones de Bajada de CargasDocument83 pagesLecciones de Bajada de CargasMayte Albino100% (2)
- Conexion A Cortante - 1Document5 pagesConexion A Cortante - 1sergioPas encore d'évaluation
- Dinámica de Sistemas de N Grados de LibertadDocument19 pagesDinámica de Sistemas de N Grados de Libertadjonypres19Pas encore d'évaluation
- DragadoDocument12 pagesDragadokimi3113Pas encore d'évaluation
- 3 (1) - Clase 2 DinamicaDocument112 pages3 (1) - Clase 2 DinamicaJuan Carlos Caracas ValladaresPas encore d'évaluation
- Sistemas Con Varios Grados de LibertadDocument21 pagesSistemas Con Varios Grados de LibertadRom DioPas encore d'évaluation
- Calculo de Valor Característico - Iterativo de RayleighDocument3 pagesCalculo de Valor Característico - Iterativo de Rayleigh33YURYPas encore d'évaluation
- Viga Sobre Fundación Elástica PDFDocument26 pagesViga Sobre Fundación Elástica PDFSantiago EcheverríaPas encore d'évaluation
- Vibracion Libre No AmortiguadaDocument14 pagesVibracion Libre No AmortiguadaCarlos Alberto Acosta Olmedo100% (1)
- 3 Grados de LibertadDocument11 pages3 Grados de LibertadKely Ticona ChiaraPas encore d'évaluation
- Propiedades Estructurales de Los Sistemas MúltiplesDocument12 pagesPropiedades Estructurales de Los Sistemas MúltiplesJose Ivan CarrilloPas encore d'évaluation
- Trabajo de Diseño SismoresistenteDocument12 pagesTrabajo de Diseño SismoresistenteAmedalig Rojas RomanPas encore d'évaluation
- Sistemas Vibratorios de un Grado de LibertadDocument19 pagesSistemas Vibratorios de un Grado de LibertadDavid GuanipaPas encore d'évaluation
- Contratrabe 1Document33 pagesContratrabe 1sjfhskghPas encore d'évaluation
- Analisis Dinamico de EstructurasDocument66 pagesAnalisis Dinamico de EstructuraschetguillocPas encore d'évaluation
- Proyecto Plantación Uva de Mesa en Caspe Zaragoza PDFDocument275 pagesProyecto Plantación Uva de Mesa en Caspe Zaragoza PDFLuis Alted HurtadoPas encore d'évaluation
- AmortiguamientoDocument11 pagesAmortiguamientourdanetanpPas encore d'évaluation
- Método coeficientes indeterminados ecuación diferencial linealDocument2 pagesMétodo coeficientes indeterminados ecuación diferencial linealSixsagPas encore d'évaluation
- 04 Sistemas Dinámicos MGDLDocument66 pages04 Sistemas Dinámicos MGDLMaqMaikPas encore d'évaluation
- Diccionario Del Sistema de Clasificación Anatómica, Terapéutica, Química - ATCDocument103 pagesDiccionario Del Sistema de Clasificación Anatómica, Terapéutica, Química - ATCAmp CiclicoPas encore d'évaluation
- Métodos síntesis sólidosDocument102 pagesMétodos síntesis sólidosCynthia Aseneth Velázquez100% (1)
- Esfuerzo de Origen TermicoDocument33 pagesEsfuerzo de Origen TermicoJhunior BecerraPas encore d'évaluation
- Problemas Ingenieria SismicaDocument7 pagesProblemas Ingenieria SismicaLorenaRamosPereiraPas encore d'évaluation
- Método de La RigidezDocument39 pagesMétodo de La RigidezWilly TovperPas encore d'évaluation
- Proceso en Matlab para Realizar Un Portico PlanoDocument9 pagesProceso en Matlab para Realizar Un Portico PlanoFranklin Bravo EspinelPas encore d'évaluation
- Capitulo 4.-Estructuras ArticuladasDocument58 pagesCapitulo 4.-Estructuras ArticuladasPam Legoas100% (1)
- Analisis ModalDocument3 pagesAnalisis ModalWilder LunaPas encore d'évaluation
- Ejercicio de Un Sistema Con Un Grado de Libertad Sin AmortiguamientoDocument3 pagesEjercicio de Un Sistema Con Un Grado de Libertad Sin AmortiguamientoSaldaña Sepúlveda JhordinPas encore d'évaluation
- Adecuación nave agroindustrial TeguiseDocument335 pagesAdecuación nave agroindustrial Teguiseg62morejPas encore d'évaluation
- Vibración ForzadaDocument65 pagesVibración ForzadaYahirSantaCruzNúñezPas encore d'évaluation
- Vibraciones mecánicas: análisis y controlDocument11 pagesVibraciones mecánicas: análisis y controlMichi Iturbide Agui100% (1)
- Endurecimiento Por DispersionDocument20 pagesEndurecimiento Por DispersionAnthony AlvarezPas encore d'évaluation
- Fórmula para Ecuaciones de Cuarto GradoDocument1 pageFórmula para Ecuaciones de Cuarto GradoDiegoPas encore d'évaluation
- Excel CalculoDocument27 pagesExcel CalculoDith GutierrezPas encore d'évaluation
- Vibraciones MecanicasDocument21 pagesVibraciones MecanicasJuan perezPas encore d'évaluation
- Análisis sísmico mediante métodos estáticos y dinámicosDocument15 pagesAnálisis sísmico mediante métodos estáticos y dinámicosDianis MedinaPas encore d'évaluation
- Ejemplo-5p5 p149 r4 Esfuerzo-PlanoDocument13 pagesEjemplo-5p5 p149 r4 Esfuerzo-Planoingeniero1986Pas encore d'évaluation
- Catalogo Actualizado CARCAMO A-34Document90 pagesCatalogo Actualizado CARCAMO A-343dycsaPas encore d'évaluation
- Tesis - Analisis de Cimentaciones Superficiales para MaquinariaDocument98 pagesTesis - Analisis de Cimentaciones Superficiales para MaquinariaHectorHendrixPas encore d'évaluation
- Sistema de Escaleras OrtopoligonalesDocument6 pagesSistema de Escaleras OrtopoligonalesJeiser VasquezPas encore d'évaluation
- Análisis Sismico Por ComputadoraDocument17 pagesAnálisis Sismico Por ComputadoraDiseño Estructural SismoresistentePas encore d'évaluation
- Programa de Desarrollo RuralDocument205 pagesPrograma de Desarrollo RuralrodrisalgueroPas encore d'évaluation
- Ejercicios Sin AmortiguamientoDocument16 pagesEjercicios Sin AmortiguamientofabrizioPas encore d'évaluation
- Zapata CombinadaDocument1 pageZapata CombinadaPilarPas encore d'évaluation
- Sistema Resorte MasaDocument16 pagesSistema Resorte Masayack9392Pas encore d'évaluation
- Aplicaciones de Las Ecuaciones Diferenciales de Orden SuperiorDocument23 pagesAplicaciones de Las Ecuaciones Diferenciales de Orden SuperiorAlvaro Charris GarciaPas encore d'évaluation
- INFORMEDocument9 pagesINFORMEDanna BravoPas encore d'évaluation
- Modelado Con Ecuaciones Diferenciales de Orden SuperiorDocument3 pagesModelado Con Ecuaciones Diferenciales de Orden SuperiorHarry Campos VenturaPas encore d'évaluation
- Modelado Con Ecuaciones Diferenciales de Orden SuperiorDocument11 pagesModelado Con Ecuaciones Diferenciales de Orden SuperiorNEMPas encore d'évaluation
- Diplomado InstrumentacionDocument9 pagesDiplomado InstrumentacionMIsión NIño FElizPas encore d'évaluation
- Lab - Adquisicion de Datos-TemperaturaDocument9 pagesLab - Adquisicion de Datos-TemperaturaMIsión NIño FElizPas encore d'évaluation
- Convertir VB6 LPT a USB en 2 horasDocument3 pagesConvertir VB6 LPT a USB en 2 horasErick ToasaPas encore d'évaluation
- Profibus 1Document37 pagesProfibus 1Wilmer AlegriaPas encore d'évaluation
- Texto 1Document9 pagesTexto 1JAIME MARTINEZ HERNANDEZPas encore d'évaluation
- CV Gonzalez EfrainDocument4 pagesCV Gonzalez EfrainMIsión NIño FElizPas encore d'évaluation
- DicomDocument12 pagesDicomMIsión NIño FElizPas encore d'évaluation
- FailetDocument6 pagesFailetDavid ArboledaPas encore d'évaluation
- Mantenimiento máquinas plásticasDocument78 pagesMantenimiento máquinas plásticasVerito ToapantaPas encore d'évaluation
- OsciloscopioDocument16 pagesOsciloscopioMIsión NIño FElizPas encore d'évaluation
- Interfaz USB Generica para Comunicacion Con Dispositivos ElectronicosDocument40 pagesInterfaz USB Generica para Comunicacion Con Dispositivos ElectronicosAngell Eduardo Razuri BuchelliPas encore d'évaluation
- 004 PDFDocument35 pages004 PDFCeli Claros AguilarPas encore d'évaluation
- Protocolos USBDocument11 pagesProtocolos USBdyland_lennyPas encore d'évaluation
- 004 PDFDocument35 pages004 PDFCeli Claros AguilarPas encore d'évaluation
- 7000 Um150 - Es P PDFDocument510 pages7000 Um150 - Es P PDFDarwin AHPas encore d'évaluation
- Manual Mantenimiento Camion Minero 797b CaterpillarDocument64 pagesManual Mantenimiento Camion Minero 797b CaterpillarManuel Sd62% (13)
- Mantenimiento máquinas plásticasDocument78 pagesMantenimiento máquinas plásticasVerito ToapantaPas encore d'évaluation
- Actualidad 413Document3 pagesActualidad 413ZeroPas encore d'évaluation
- Funciones Explícitas y Funciones ImplícitasDocument4 pagesFunciones Explícitas y Funciones ImplícitasLuis García Estrada100% (1)
- DERIVADAS Y APLICACIONES MECÁNICASDocument28 pagesDERIVADAS Y APLICACIONES MECÁNICASJose Angel Leon HernandezPas encore d'évaluation
- P2 AnriDocument2 pagesP2 AnriRonald Nilson CAPas encore d'évaluation
- Imprimible - RompecabezasDocument3 pagesImprimible - RompecabezasMarjorie Daniela Ramirez RajoPas encore d'évaluation
- Trabajo Jhon NaranjoDocument8 pagesTrabajo Jhon NaranjoMiguel SaenzPas encore d'évaluation
- Economia Matematica IIDocument20 pagesEconomia Matematica IIAnonymous GH5TSp7Pas encore d'évaluation
- Ejercicios de OctaveDocument4 pagesEjercicios de OctaveMiguel Ugarte EncisoPas encore d'évaluation
- Calculo Diferencial - 2P 2021Document11 pagesCalculo Diferencial - 2P 2021Paula Andrea Ordosgoitia NovoaPas encore d'évaluation
- CD U3 2019 Calculo DiferencialDocument12 pagesCD U3 2019 Calculo DiferencialcbupamelapijaPas encore d'évaluation
- Ondas en física: ecuaciones y problemas resueltosDocument2 pagesOndas en física: ecuaciones y problemas resueltosGuille Diaz MardonesPas encore d'évaluation
- ACFrOgBNl3CmjwXlbCXqCO1P3Fh5L9usz1j4cJ6Yy4vmuWEXxDRaS8qs6Hw m3 a-Tr0ptkyfoub49w8t1mSzSAYxABuxijup6tkSEmPZeS8PHn7AwRdHGIVoSC9qmFM5Dw5 KvmNL13ToPzTNAnDocument13 pagesACFrOgBNl3CmjwXlbCXqCO1P3Fh5L9usz1j4cJ6Yy4vmuWEXxDRaS8qs6Hw m3 a-Tr0ptkyfoub49w8t1mSzSAYxABuxijup6tkSEmPZeS8PHn7AwRdHGIVoSC9qmFM5Dw5 KvmNL13ToPzTNAnPedro Rocha VarelaPas encore d'évaluation
- 2act2 (1) Rubenjose Maury EcuacioneDocument29 pages2act2 (1) Rubenjose Maury EcuacioneOscar Fernando Portilla GómezPas encore d'évaluation
- Aplicaciones DerivadaDocument31 pagesAplicaciones DerivadasorotropodoPas encore d'évaluation
- Tarea 1 - El Concepto de Integral PDFDocument8 pagesTarea 1 - El Concepto de Integral PDFJUAN2254Pas encore d'évaluation
- Teoremas Importantes Del CalculoDocument18 pagesTeoremas Importantes Del CalculoMichelle ZelayaPas encore d'évaluation
- E-Portafolio Matematicas II FinalDocument27 pagesE-Portafolio Matematicas II FinalMaría IgnaciaPas encore d'évaluation
- Temario de Obs MeteorológicoDocument9 pagesTemario de Obs MeteorológicoDavid Merino100% (1)
- Tabla de Derivadas PDFDocument2 pagesTabla de Derivadas PDFTaylor Andres Amaya100% (2)
- Taller No 5 Aplicaciones de La DericadaDocument6 pagesTaller No 5 Aplicaciones de La DericadaYadith Benitez CastroPas encore d'évaluation
- Tarea 1 Calculo IntegralDocument14 pagesTarea 1 Calculo IntegralDanny Ortiz HernandezPas encore d'évaluation
- Matematicas II TrabajoColaborativo 2022 Version1Document5 pagesMatematicas II TrabajoColaborativo 2022 Version1Alejandro Ortiz100% (2)
- Aprendiendo A Usar La Calculadora Fx9860GIIDocument9 pagesAprendiendo A Usar La Calculadora Fx9860GIIpanchojaaPas encore d'évaluation
- Guia Completa de Trazado de CurvasDocument3 pagesGuia Completa de Trazado de CurvasCR Cr100% (1)
- Derivada de Orden SuperiorDocument10 pagesDerivada de Orden SuperiorGeison AlexanderPas encore d'évaluation
- Introducción A Well TestingDocument45 pagesIntroducción A Well TestingAnnuar GarciaPas encore d'évaluation
- Problemas de Fisica Resueltos Por IntegralesDocument5 pagesProblemas de Fisica Resueltos Por IntegralesAriel SaPa40% (5)
- 2 Introducción1Document3 pages2 Introducción1Metzli Albore GarciPas encore d'évaluation
- FUNCIONES VECTORIALESDocument18 pagesFUNCIONES VECTORIALESElvimar YajurePas encore d'évaluation
- Faciochavez Paola M18s3ai6Document3 pagesFaciochavez Paola M18s3ai6Citlalli ChPas encore d'évaluation