Vous aimerez peut-être aussi
- Continuous and Discrete Time Signals and Systems (Mandal & Asif) Solutions - Chap03Document45 pagesContinuous and Discrete Time Signals and Systems (Mandal & Asif) Solutions - Chap03mvaldermPas encore d'évaluation
- 116 hw1Document5 pages116 hw1thermopolis3012Pas encore d'évaluation
- HW 5 SolDocument9 pagesHW 5 SolAlpaslan ERDAĞPas encore d'évaluation
- Frobenius Method (All Three Cases)Document7 pagesFrobenius Method (All Three Cases)Moiz Mohsin100% (4)
- Midterm 2010 SolutionsDocument8 pagesMidterm 2010 SolutionsErico ArchetiPas encore d'évaluation
- hw7 - Sol 2Document15 pageshw7 - Sol 2zachPas encore d'évaluation
- Functions in MATLAB: X 2.75 y X 2 + 5 X + 7 y 2.8313e+001Document21 pagesFunctions in MATLAB: X 2.75 y X 2 + 5 X + 7 y 2.8313e+001Rafflesia KhanPas encore d'évaluation
- EE263s Homework 4Document11 pagesEE263s Homework 4Edwin Jonathan Urrea GomezPas encore d'évaluation
- Real Analysis - Homework Solutions: Chris Monico, May 2, 2013Document37 pagesReal Analysis - Homework Solutions: Chris Monico, May 2, 2013gustavoPas encore d'évaluation
- Hw2sol PDFDocument15 pagesHw2sol PDFPei JingPas encore d'évaluation
- Hw3sol 21015 PDFDocument13 pagesHw3sol 21015 PDFPei JingPas encore d'évaluation
- Vertigo TestDocument6 pagesVertigo Testalam saroorPas encore d'évaluation
- ENEE 660 HW Sol #2Document9 pagesENEE 660 HW Sol #2PeacefulLionPas encore d'évaluation
- 2 12 PDFDocument10 pages2 12 PDFRachel WatsonPas encore d'évaluation
- EE 5375/7375 Random Processes Homework #4 SolutionsDocument8 pagesEE 5375/7375 Random Processes Homework #4 SolutionsbamcloPas encore d'évaluation
- Cs421 Cheat SheetDocument2 pagesCs421 Cheat SheetJoe McGuckinPas encore d'évaluation
- 3.1 Least-Squares ProblemsDocument28 pages3.1 Least-Squares ProblemsGabo GarcíaPas encore d'évaluation
- EE263 Homework 5 SolutionsDocument15 pagesEE263 Homework 5 SolutionsEdwin Jonathan Urrea GomezPas encore d'évaluation
- Measure Theory - SEODocument62 pagesMeasure Theory - SEOMayank MalhotraPas encore d'évaluation
- hw4 Sol PDFDocument23 pageshw4 Sol PDFEdwin Jonathan Urrea Gomez100% (1)
- State SpaceDocument20 pagesState SpacepattanayaksuchiPas encore d'évaluation
- hw6 2011 05 16 01 SolutionsDocument17 pageshw6 2011 05 16 01 SolutionsMorokot AngelaPas encore d'évaluation
- EE263 Homework 3 Solutions: RemarksDocument14 pagesEE263 Homework 3 Solutions: RemarksEdwin Jonathan Urrea Gomez100% (1)
- EE263s Homework 3Document12 pagesEE263s Homework 3Edwin Jonathan Urrea GomezPas encore d'évaluation
- MAE 200A - Homework Set #1Document2 pagesMAE 200A - Homework Set #1vsauerPas encore d'évaluation
- Linear Control Systems Lecture # 8 Observability & Discrete-Time SystemsDocument25 pagesLinear Control Systems Lecture # 8 Observability & Discrete-Time SystemsRavi VermaPas encore d'évaluation
- Linear System Theory and Desing PDFDocument688 pagesLinear System Theory and Desing PDFJose David MartinezPas encore d'évaluation
- Real Analysis Cheat SheetDocument8 pagesReal Analysis Cheat SheetJoannaWilliamsPas encore d'évaluation
- Ee263 Ps1 SolDocument11 pagesEe263 Ps1 SolMorokot AngelaPas encore d'évaluation
- 263 HomeworkDocument153 pages263 HomeworkHimanshu Saikia JPas encore d'évaluation
- Sample Final Examination Questions IE406 - Introduction To Mathematical Programming Dr. RalphsDocument10 pagesSample Final Examination Questions IE406 - Introduction To Mathematical Programming Dr. RalphsLuis IvanPas encore d'évaluation
- Midterm Exam SolutionsDocument26 pagesMidterm Exam SolutionsShelaRamos100% (1)
- Legendre Polynomials PDFDocument3 pagesLegendre Polynomials PDFAmalVijayPas encore d'évaluation
- Bartle Intro To Real Analysis Solutions CH 9 PDFDocument9 pagesBartle Intro To Real Analysis Solutions CH 9 PDFdoni ajahPas encore d'évaluation
- Singular Value Decomposition Example PDFDocument9 pagesSingular Value Decomposition Example PDFawekeuPas encore d'évaluation
- Cayley Hamilton TheoremDocument5 pagesCayley Hamilton TheoremManjusha SharmaPas encore d'évaluation
- Medp U2 A3 AnomDocument4 pagesMedp U2 A3 AnomAna Yansy Olarte MendozaPas encore d'évaluation
- Real Analysis Solutions PDFDocument3 pagesReal Analysis Solutions PDFShubhankar BansodPas encore d'évaluation
- Stanford Stats 200Document6 pagesStanford Stats 200Jung Yoon SongPas encore d'évaluation
- Deep Learning Assignment3 SolutionDocument9 pagesDeep Learning Assignment3 SolutionRaushan KashyapPas encore d'évaluation
- Linear Partial Differential Equations of High Order With Constant CoefficientsDocument58 pagesLinear Partial Differential Equations of High Order With Constant CoefficientsShahin Kauser ZiaudeenPas encore d'évaluation
- Unit I Partial Differential EquationsDocument168 pagesUnit I Partial Differential EquationsRenish AntoPas encore d'évaluation
- Herstein Topics in Algebra Solution 2.8Document6 pagesHerstein Topics in Algebra Solution 2.8Arun PatelPas encore d'évaluation
- Assignment A - Group TheoryDocument16 pagesAssignment A - Group Theoryakshat dwivediPas encore d'évaluation
- Effective Range TheoryDocument3 pagesEffective Range TheoryAbhinav KumarPas encore d'évaluation
- Memoryless Property of Geometric DistributionDocument1 pageMemoryless Property of Geometric DistributionSasi TheLegendPas encore d'évaluation
- Important Theorems - Real AnalysisDocument9 pagesImportant Theorems - Real Analysismmmellyyyy50% (2)
- Quasilinear PDEDocument15 pagesQuasilinear PDEAnnie ToddPas encore d'évaluation
- Lecture 24 (Matrix Chain Multiplication)Document17 pagesLecture 24 (Matrix Chain Multiplication)Almaz RizviPas encore d'évaluation
- Chapter 9 Uniform Convergence and IntegrationDocument27 pagesChapter 9 Uniform Convergence and Integrationnormal@backup100% (1)
- Medi1 U3 Ea YacoDocument7 pagesMedi1 U3 Ea YacoEma Castillo OrtizPas encore d'évaluation
- Time Dependent Perturbation TheoryDocument39 pagesTime Dependent Perturbation TheoryGuna ShanthamurthyPas encore d'évaluation
- Mechanics by Sir Nouman Siddique PDFDocument57 pagesMechanics by Sir Nouman Siddique PDFBint E ShafiquePas encore d'évaluation
- Matlab Project Calculus 2Document57 pagesMatlab Project Calculus 2teruaki ogawaPas encore d'évaluation
- Interior, Closed, ClosureDocument17 pagesInterior, Closed, ClosureSURESH KANNANPas encore d'évaluation
- Linear Differential Equation J&I PDFDocument77 pagesLinear Differential Equation J&I PDFscribdrayanPas encore d'évaluation
- HW4 SolDocument4 pagesHW4 SolharshPas encore d'évaluation
- Lecture 17 - Representation Theory of Lie Groups and Lie Algebras (Schuller's Geometric Anatomy of Theoretical Physics)Document12 pagesLecture 17 - Representation Theory of Lie Groups and Lie Algebras (Schuller's Geometric Anatomy of Theoretical Physics)Simon ReaPas encore d'évaluation
- Apostol Chapter 02 SolutionsDocument23 pagesApostol Chapter 02 SolutionsGeo JosPas encore d'évaluation
- Business Mathematics Application Calculus To Solve Business ProblemsDocument51 pagesBusiness Mathematics Application Calculus To Solve Business ProblemsEida HidayahPas encore d'évaluation
- Ugmath2022 22may PDFDocument6 pagesUgmath2022 22may PDFManashree VyasPas encore d'évaluation
- Cable For Solar Power SystemDocument1 pageCable For Solar Power SystemEnspartan 63Pas encore d'évaluation
- SBC 506Document10 pagesSBC 506Amr HassanPas encore d'évaluation
- Sim2 Fads Vs Trends PDFDocument9 pagesSim2 Fads Vs Trends PDFMarciano MelchorPas encore d'évaluation
- Econ 620 SyllabusDocument3 pagesEcon 620 SyllabusTOM ZACHARIASPas encore d'évaluation
- Thetentrin: DeviceDocument84 pagesThetentrin: Deviceorli20041Pas encore d'évaluation
- Mechanical Engineering Department University of Engineering and Technology, LahoreDocument22 pagesMechanical Engineering Department University of Engineering and Technology, LahoreSyed MunawarPas encore d'évaluation
- Creating and Renewing Urban Structures - Tall Buildings, Bridges and InfrastructureDocument2 pagesCreating and Renewing Urban Structures - Tall Buildings, Bridges and InfrastructureDesign explorer olomizanaPas encore d'évaluation
- CEMB N100 Vibrometer ManualDocument52 pagesCEMB N100 Vibrometer Manuallimim56582Pas encore d'évaluation
- Globalization, Contemporary Challenges and Social Work PracticeDocument14 pagesGlobalization, Contemporary Challenges and Social Work PracticeXXXXXXXXXXXPas encore d'évaluation
- AJ BIGs Serpentine Pavilion Organic in Form But Not in ConstructionDocument3 pagesAJ BIGs Serpentine Pavilion Organic in Form But Not in ConstructionItamarJuniorPas encore d'évaluation
- Memory Research Paper ExampleDocument8 pagesMemory Research Paper Examplexhzscbbkf100% (1)
- Method For The Analysis of Health Personnel Availability in A Pandemic CrisisDocument10 pagesMethod For The Analysis of Health Personnel Availability in A Pandemic Crisismaribel SalinasPas encore d'évaluation
- Signed PAN: Erwin Panofsky's (1892-1968) "The History of Art As A Humanistic Discipline" (Princeton, 1938)Document94 pagesSigned PAN: Erwin Panofsky's (1892-1968) "The History of Art As A Humanistic Discipline" (Princeton, 1938)Adrian Anton MarinPas encore d'évaluation
- Statisticsprobability11 q4 Week2 v4Document10 pagesStatisticsprobability11 q4 Week2 v4Sheryn CredoPas encore d'évaluation
- DSP AssignmentDocument16 pagesDSP AssignmentPunitha ShanmugamPas encore d'évaluation
- Temp ControlledDocument14 pagesTemp Controlledvivekanand_bonalPas encore d'évaluation
- Ultra Mag™ Electromagnetic Flow Meter Submittal PackageDocument19 pagesUltra Mag™ Electromagnetic Flow Meter Submittal PackageSalvador HernándezPas encore d'évaluation
- Biological PlausibilityDocument2 pagesBiological PlausibilityTreeSix SolutionsPas encore d'évaluation
- Halene - P: Technical Data Sheet F103Document1 pageHalene - P: Technical Data Sheet F103Dharmendrasinh ZalaPas encore d'évaluation
- Case Study of Master of Business AdminisDocument8 pagesCase Study of Master of Business AdminisYoke MalondaPas encore d'évaluation
- Lesson 1.1 Prime NumbersDocument4 pagesLesson 1.1 Prime NumbersAhmed WagihPas encore d'évaluation
- Texture by The Sand Circle Method MeasurementsDocument2 pagesTexture by The Sand Circle Method MeasurementssajjaduetPas encore d'évaluation
- 06 Chapter 12 (Compiled) PDFDocument80 pages06 Chapter 12 (Compiled) PDFHaziq KhairiPas encore d'évaluation
- Pavement DesignDocument12 pagesPavement DesignTarun KumarPas encore d'évaluation
- Navigating The Complexities of Modern SocietyDocument2 pagesNavigating The Complexities of Modern SocietytimikoPas encore d'évaluation
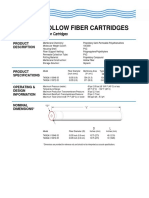
- Targa Ii Hollow Fiber Cartridges: 10-Inch Water Ultrafiltration CartridgesDocument2 pagesTarga Ii Hollow Fiber Cartridges: 10-Inch Water Ultrafiltration CartridgesChristianus RudyantoPas encore d'évaluation
- Guidelines For Online DLEPCDocument21 pagesGuidelines For Online DLEPCdrkantinifPas encore d'évaluation
- Automation Studio™ at CONEXPO 2023Document5 pagesAutomation Studio™ at CONEXPO 2023Rushil H SevakPas encore d'évaluation
- ACT Crack Geology AnswersDocument38 pagesACT Crack Geology AnswersMahmoud EbaidPas encore d'évaluation