Vous aimerez peut-être aussi
- 18m Taranaki Qwest Pilot BoatDocument1 page18m Taranaki Qwest Pilot BoatnavalarchmarinePas encore d'évaluation
- 25m Floating Pontoon Whaft - Scantling CalculationDocument4 pages25m Floating Pontoon Whaft - Scantling Calculationnavalarchmarine100% (1)
- Electrical Balance Calculation PDFDocument4 pagesElectrical Balance Calculation PDFnavalarchmarinePas encore d'évaluation
- Technical Proposal-NAMDocument8 pagesTechnical Proposal-NAMnavalarchmarinePas encore d'évaluation
- My Wima For BSK 2 (EDITED) PDFDocument2 pagesMy Wima For BSK 2 (EDITED) PDFnavalarchmarinePas encore d'évaluation
- 25m Floating Pontoon Whaft - Scantling CalculationDocument4 pages25m Floating Pontoon Whaft - Scantling Calculationnavalarchmarine100% (1)
- 608 NR - 2015 01Document24 pages608 NR - 2015 01navalarchmarinePas encore d'évaluation
- 15m TugboatDocument8 pages15m TugboatnavalarchmarinePas encore d'évaluation
- DNV Damage Control Guidelines 1997Document17 pagesDNV Damage Control Guidelines 1997navalarchmarinePas encore d'évaluation
- Design News 2014Document2 pagesDesign News 2014navalarchmarinePas encore d'évaluation
- GA Plan - Owned 47 Mtrs - Container GADocument1 pageGA Plan - Owned 47 Mtrs - Container GAnavalarchmarinePas encore d'évaluation
- Ship Structural DesignDocument25 pagesShip Structural Designnavalarchmarine100% (7)
- Damen Cutter Suction Dredger 250 B12 0296 YN561218Document2 pagesDamen Cutter Suction Dredger 250 B12 0296 YN561218navalarchmarinePas encore d'évaluation
- Steel-Hulled Crew Boats For Brunei Cummins HotipsDocument3 pagesSteel-Hulled Crew Boats For Brunei Cummins HotipsnavalarchmarinePas encore d'évaluation
- Yingshan Huamao Ship Outfitting Equipment Co.,LtdDocument1 pageYingshan Huamao Ship Outfitting Equipment Co.,LtdnavalarchmarinePas encore d'évaluation
- Damen Walking Cutter Suction Dredger 250 B12 0490 Susanna IIDocument2 pagesDamen Walking Cutter Suction Dredger 250 B12 0490 Susanna IInavalarchmarinePas encore d'évaluation
- Radojcic - On High Speed Mono.2010.SYMPDocument19 pagesRadojcic - On High Speed Mono.2010.SYMPnavalarchmarine100% (1)
- The Resistance & Trim of Semi Displacement - FAST 2001Document9 pagesThe Resistance & Trim of Semi Displacement - FAST 2001navalarchmarinePas encore d'évaluation
- Stuctural Analysis of Helicopter Flight and Hangar DeckDocument68 pagesStuctural Analysis of Helicopter Flight and Hangar Decknavalarchmarine100% (1)
- Causal-Comparative Research: Chapter SixteenDocument15 pagesCausal-Comparative Research: Chapter SixteennavalarchmarinePas encore d'évaluation
- ISO 12217-1 Calculation WorksheetDocument2 pagesISO 12217-1 Calculation Worksheetnavalarchmarine100% (2)
- Davidson K S M.turning Steering of .1944.TRANSDocument38 pagesDavidson K S M.turning Steering of .1944.TRANSnavalarchmarinePas encore d'évaluation
- 2D Frame Analysis: Analysis of A 2D Frame Subject To Distributed Loads, Point Loads and MomentsDocument32 pages2D Frame Analysis: Analysis of A 2D Frame Subject To Distributed Loads, Point Loads and MomentsnavalarchmarinePas encore d'évaluation
- NC Tech SpecsDocument5 pagesNC Tech SpecsnavalarchmarinePas encore d'évaluation
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Manual Samsung Galaxy S Duos GT-S7562Document151 pagesManual Samsung Galaxy S Duos GT-S7562montesjjPas encore d'évaluation
- AFAR - 07 - New Version No AnswerDocument7 pagesAFAR - 07 - New Version No AnswerjonasPas encore d'évaluation
- Internship ReportDocument36 pagesInternship ReportM.IMRAN0% (1)
- Getting Returning Vets Back On Their Feet: Ggoopp EennddggaammeeDocument28 pagesGetting Returning Vets Back On Their Feet: Ggoopp EennddggaammeeSan Mateo Daily JournalPas encore d'évaluation
- 200150, 200155 & 200157 Accelerometers: DescriptionDocument16 pages200150, 200155 & 200157 Accelerometers: DescriptionJOSE MARIA DANIEL CANALESPas encore d'évaluation
- Ac221 and Ac211 CourseoutlineDocument10 pagesAc221 and Ac211 CourseoutlineLouis Maps MapangaPas encore d'évaluation
- Zahid Imran CVDocument4 pagesZahid Imran CVDhia Hadj SassiPas encore d'évaluation
- Optimal Dispatch of Generation: Prepared To Dr. Emaad SedeekDocument7 pagesOptimal Dispatch of Generation: Prepared To Dr. Emaad SedeekAhmedRaafatPas encore d'évaluation
- Minuets of The Second SCTVE MeetingDocument11 pagesMinuets of The Second SCTVE MeetingLokuliyanaNPas encore d'évaluation
- IIM L: 111iiiiiiiDocument54 pagesIIM L: 111iiiiiiiJavier GonzalezPas encore d'évaluation
- Part Time Civil SyllabusDocument67 pagesPart Time Civil SyllabusEr Govind Singh ChauhanPas encore d'évaluation
- Functions: Var S AddDocument13 pagesFunctions: Var S AddRevati MenghaniPas encore d'évaluation
- Clash of Clans Hack Activation CodeDocument2 pagesClash of Clans Hack Activation Codegrumpysadness7626Pas encore d'évaluation
- Zygosaccharomyces James2011Document11 pagesZygosaccharomyces James2011edson escamillaPas encore d'évaluation
- Resume NetezaDocument5 pagesResume Netezahi4149Pas encore d'évaluation
- NHM Thane Recruitment 2022 For 280 PostsDocument9 pagesNHM Thane Recruitment 2022 For 280 PostsDr.kailas Gaikwad , MO UPHC Turbhe NMMCPas encore d'évaluation
- Power Control 3G CDMADocument18 pagesPower Control 3G CDMAmanproxPas encore d'évaluation
- Internal Analysis: Pertemuan KeDocument15 pagesInternal Analysis: Pertemuan Kekintan utamiPas encore d'évaluation
- Activity Evaluation Form: "Where Children Come First"Document1 pageActivity Evaluation Form: "Where Children Come First"TuTitPas encore d'évaluation
- DxDiag Copy MSIDocument45 pagesDxDiag Copy MSITạ Anh TuấnPas encore d'évaluation
- Metalcor - 1.4507 - Alloy - F255 - Uranus 52N - S32520Document1 pageMetalcor - 1.4507 - Alloy - F255 - Uranus 52N - S32520NitinPas encore d'évaluation
- Ch06 Allocating Resources To The ProjectDocument55 pagesCh06 Allocating Resources To The ProjectJosh ChamaPas encore d'évaluation
- MCQs - Chapters 31 - 32Document9 pagesMCQs - Chapters 31 - 32Lâm Tú HânPas encore d'évaluation
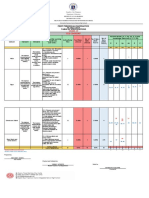
- Revised Final Quarter 1 Tos-Rbt-Sy-2022-2023 Tle-Cookery 10Document6 pagesRevised Final Quarter 1 Tos-Rbt-Sy-2022-2023 Tle-Cookery 10May Ann GuintoPas encore d'évaluation
- Lec. 2Document22 pagesLec. 2محمدPas encore d'évaluation
- Packet Unit 3 - Atomic Structure-Answers ChemistryDocument11 pagesPacket Unit 3 - Atomic Structure-Answers ChemistryMario J. KafatiPas encore d'évaluation
- Discrete Mathematics and Its Applications: Basic Structures: Sets, Functions, Sequences, and SumsDocument61 pagesDiscrete Mathematics and Its Applications: Basic Structures: Sets, Functions, Sequences, and SumsBijori khanPas encore d'évaluation
- CoSiO2 For Fischer-Tropsch Synthesis Comparison...Document5 pagesCoSiO2 For Fischer-Tropsch Synthesis Comparison...Genesis CalderónPas encore d'évaluation
- Specialty Coffee Association of Indonesia Cupping Form (ARABICA)Document1 pageSpecialty Coffee Association of Indonesia Cupping Form (ARABICA)Saiffullah RaisPas encore d'évaluation
- Mitsubishi FanDocument2 pagesMitsubishi FanKyaw ZawPas encore d'évaluation