Vous aimerez peut-être aussi
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5795)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1091)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Geometry Chapter 7 - Section 7.3 Use Similar Right Triangles PDFDocument4 pagesGeometry Chapter 7 - Section 7.3 Use Similar Right Triangles PDFArthur BragaPas encore d'évaluation
- Organic Chem U-3Document51 pagesOrganic Chem U-3sinte beyuPas encore d'évaluation
- 46.3 Turning Points: 396 Engineering MathematicsDocument5 pages46.3 Turning Points: 396 Engineering MathematicsIndika ShanthaPas encore d'évaluation
- 5-Distance & AngleDocument66 pages5-Distance & AngleMurali Krishnan SelvarajaPas encore d'évaluation
- Motion of Systems of Particles Class XIDocument14 pagesMotion of Systems of Particles Class XIKAMAL KANT KUSHWAHAPas encore d'évaluation
- Mathematical Analysis of Rhombic Dodecahedron (Catalan Solid) Applying HCR's Theory of PolygonDocument11 pagesMathematical Analysis of Rhombic Dodecahedron (Catalan Solid) Applying HCR's Theory of PolygonHarish Chandra Rajpoot100% (1)
- Teacher's Resource Book 1Document248 pagesTeacher's Resource Book 1Fazi Imi62% (13)
- 1.6-1.7 Quiz Review PDFDocument5 pages1.6-1.7 Quiz Review PDFJamina JamalodingPas encore d'évaluation
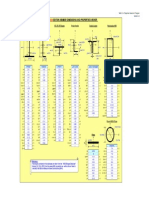
- AISC 14.1 Properties ViewerDocument2 pagesAISC 14.1 Properties ViewerJay GalvanPas encore d'évaluation
- Continuum Mechanics - TensorsDocument12 pagesContinuum Mechanics - TensorsBrian WoodPas encore d'évaluation
- Isi Kandungan - Kertas 1Document3 pagesIsi Kandungan - Kertas 1Amirudin Md IsaPas encore d'évaluation
- Graphs and Transformations 4B: 1 A y (X + 1) (X + 2) (X + 3) (X + 4) C y X (X + 1)Document4 pagesGraphs and Transformations 4B: 1 A y (X + 1) (X + 2) (X + 3) (X + 4) C y X (X + 1)AnnaPas encore d'évaluation
- Department of Physics, University of Pennsylvania Philadelphia, PA 19104-6396, USADocument26 pagesDepartment of Physics, University of Pennsylvania Philadelphia, PA 19104-6396, USABayer MitrovicPas encore d'évaluation
- 101 Shortcuts in MATHDocument20 pages101 Shortcuts in MATHTanusri Ghosh100% (1)
- Hib Be Ler Worked ExamplesDocument2 356 pagesHib Be Ler Worked ExamplesMary DunhamPas encore d'évaluation
- Laboratory Manual in Elementary SurveyingDocument39 pagesLaboratory Manual in Elementary SurveyingMigaeaPas encore d'évaluation
- The Hindu Senior Secondary School.: Model Papers - Ii Mathematics Class - XiiDocument3 pagesThe Hindu Senior Secondary School.: Model Papers - Ii Mathematics Class - XiiabiPas encore d'évaluation
- Cambridge International General Certificate of Secondary Education (9-1)Document16 pagesCambridge International General Certificate of Secondary Education (9-1)evelyne serafeePas encore d'évaluation
- Dynamics Midterm ExamDocument3 pagesDynamics Midterm ExamPenuel G. BantogPas encore d'évaluation
- Lost in Translation 1Document26 pagesLost in Translation 1api-202268486Pas encore d'évaluation
- Balt92 05 PDFDocument159 pagesBalt92 05 PDFeisatoponPas encore d'évaluation
- Deadly TheatreDocument2 pagesDeadly TheatreGautam Sarkar100% (1)
- The Architecture of DeathDocument4 pagesThe Architecture of DeathananditPas encore d'évaluation
- The Triangle Midsegment Theorem ExerciseDocument3 pagesThe Triangle Midsegment Theorem ExerciseLinh LinhPas encore d'évaluation
- AVITATION Level 5Document11 pagesAVITATION Level 5Rahul guptaPas encore d'évaluation
- VI Maths-WorksheDocument53 pagesVI Maths-WorkshelenovojiPas encore d'évaluation
- Dimensioning: Shortcut Command CommentDocument5 pagesDimensioning: Shortcut Command CommentMoiz MohammedPas encore d'évaluation
- Co Ly Thuyet - Bai Tap Kinematics 2-1 - C4Document74 pagesCo Ly Thuyet - Bai Tap Kinematics 2-1 - C4Minh KhôiPas encore d'évaluation
- Rectilinear Motion, Motion Graphs, Projectile and Curvilinear Motion, and Tangential and Normal Motion Sample ProblemsDocument16 pagesRectilinear Motion, Motion Graphs, Projectile and Curvilinear Motion, and Tangential and Normal Motion Sample ProblemsJohn AngeloPas encore d'évaluation