Vous aimerez peut-être aussi
- A-level Maths Revision: Cheeky Revision ShortcutsD'EverandA-level Maths Revision: Cheeky Revision ShortcutsÉvaluation : 3.5 sur 5 étoiles3.5/5 (8)
- Graphing Polynomial FunctionsDocument19 pagesGraphing Polynomial Functionshcnè dynnPas encore d'évaluation
- A Visual Rhetoric StudyDocument32 pagesA Visual Rhetoric StudylpettenkoferPas encore d'évaluation
- Chapter 1 AdvFun Notes Feb 1Document29 pagesChapter 1 AdvFun Notes Feb 1jackson maPas encore d'évaluation
- An Introduction To Fractional CalculusDocument29 pagesAn Introduction To Fractional CalculusFredrik Joachim GjestlandPas encore d'évaluation
- Arithmetic Mean PDFDocument29 pagesArithmetic Mean PDFDivya Gothi100% (1)
- Text Ranslation and TradicitonDocument283 pagesText Ranslation and TradicitonSCAF55100% (4)
- Introduction To Numerical Methods and Matlab Programming For EngineersDocument180 pagesIntroduction To Numerical Methods and Matlab Programming For EngineersNenePas encore d'évaluation
- CongressWatch #197: RA 1337-Innovative Startup ActDocument1 pageCongressWatch #197: RA 1337-Innovative Startup ActMakati Business ClubPas encore d'évaluation
- Frequentist Estimation: 4.1 Likelihood FunctionDocument6 pagesFrequentist Estimation: 4.1 Likelihood FunctionJung Yoon SongPas encore d'évaluation
- COLLEGE AND ADVANCE ALGEBRA Chapter 4Document31 pagesCOLLEGE AND ADVANCE ALGEBRA Chapter 4Myla VelascoPas encore d'évaluation
- 02-Numerical Methods of Approximation-86Document86 pages02-Numerical Methods of Approximation-86sumintoPas encore d'évaluation
- Of Approximation Numerical Methods: Learning OutcomesDocument27 pagesOf Approximation Numerical Methods: Learning OutcomesTapiwa KapondaPas encore d'évaluation
- Numerical Analysis - Chapter3 PDFDocument22 pagesNumerical Analysis - Chapter3 PDFvmedeauPas encore d'évaluation
- Algebra 2 Chapter 8Document31 pagesAlgebra 2 Chapter 8Nguyễn TrâmPas encore d'évaluation
- MTH 307 Numerical Analysis IIDocument91 pagesMTH 307 Numerical Analysis IIakinwambPas encore d'évaluation
- Arsdigita University Month 0: Mathematics For Computer ScienceDocument24 pagesArsdigita University Month 0: Mathematics For Computer ScienceDhinakar ReddyPas encore d'évaluation
- 2.definition:: Is Not Equal To 0. Polynomial Functions of Only OneDocument6 pages2.definition:: Is Not Equal To 0. Polynomial Functions of Only OneDionisio Mediario Montevirgen Jr.Pas encore d'évaluation
- Euclid Notes 3 Polynomial FunctionsDocument4 pagesEuclid Notes 3 Polynomial FunctionsHappy DolphinPas encore d'évaluation
- IvhanDocument59 pagesIvhanIvhani MaseleselePas encore d'évaluation
- Definitions & Examples: Polynomial FunctionsDocument17 pagesDefinitions & Examples: Polynomial Functionsshiela valdemoroPas encore d'évaluation
- Assignment 4Document3 pagesAssignment 4sachin rawatPas encore d'évaluation
- CS 717: EndsemDocument5 pagesCS 717: EndsemGanesh RamakrishnanPas encore d'évaluation
- Math Review: 1 Notation and DefinitionsDocument24 pagesMath Review: 1 Notation and DefinitionssafowanPas encore d'évaluation
- MAS331notes1 METRIC SPACES SHEFFIELDDocument5 pagesMAS331notes1 METRIC SPACES SHEFFIELDTejas PatelPas encore d'évaluation
- Interpolation TechniquesDocument17 pagesInterpolation TechniquesSantiago SarmientoPas encore d'évaluation
- Analytical Solution of Taylor Series in Computational Science and ApproximationDocument9 pagesAnalytical Solution of Taylor Series in Computational Science and Approximation008Akshat BedekarPas encore d'évaluation
- Lagrange InterpolationDocument4 pagesLagrange InterpolationLuqman AkramPas encore d'évaluation
- Basic MATLAB Functions and Operations Used in ME 205Document52 pagesBasic MATLAB Functions and Operations Used in ME 205jiajun898Pas encore d'évaluation
- Remainder TheoremDocument7 pagesRemainder Theoremapi-126876773Pas encore d'évaluation
- InterpolationDocument24 pagesInterpolationsubha_aeroPas encore d'évaluation
- Vieta's Formulas and The Identity Theorem: N N N 1 N 1 N 2 N 2 1 1 0Document5 pagesVieta's Formulas and The Identity Theorem: N N N 1 N 1 N 2 N 2 1 1 0IqbalScribd2014Pas encore d'évaluation
- PDFs Week6Lecture5Document9 pagesPDFs Week6Lecture5Kofi Appiah-DanquahPas encore d'évaluation
- Taylor Series: Numerical Methods, 2017BDocument4 pagesTaylor Series: Numerical Methods, 2017BAna HuacasPas encore d'évaluation
- Polynomials Annotated JADocument17 pagesPolynomials Annotated JABobPas encore d'évaluation
- Section 2.3 Polynomial Functions and Their GraphsDocument31 pagesSection 2.3 Polynomial Functions and Their GraphsdavogezuPas encore d'évaluation
- Algebra-6 FULLDocument22 pagesAlgebra-6 FULLRaman SharmaPas encore d'évaluation
- Notes 2Document117 pagesNotes 2Mustafiz AhmadPas encore d'évaluation
- 11 Parameter EstimationDocument6 pages11 Parameter EstimationfatimaPas encore d'évaluation
- Mathematical AnalysisDocument31 pagesMathematical AnalysisPablo CarreñoPas encore d'évaluation
- FormuleDocument2 pagesFormuleErvinPas encore d'évaluation
- Making Computer Algebra More SymbolicDocument7 pagesMaking Computer Algebra More SymbolicMilind RavindranathPas encore d'évaluation
- Defining Remainder TheoremDocument5 pagesDefining Remainder TheoremWill WisinconPas encore d'évaluation
- Chebyshev PDFDocument24 pagesChebyshev PDFVenkatarao ChukkaPas encore d'évaluation
- Nonsmooth OptimizationDocument12 pagesNonsmooth Optimizationchoi7Pas encore d'évaluation
- APM2613 - Lesson 5 - 0 - 2022Document12 pagesAPM2613 - Lesson 5 - 0 - 2022Darrel van OnselenPas encore d'évaluation
- Introducción A Matlab Parte 1Document44 pagesIntroducción A Matlab Parte 1MissmatPas encore d'évaluation
- Economics N110, Game Theory in The Social Sciences: UC Berkeley, Summer 2012Document23 pagesEconomics N110, Game Theory in The Social Sciences: UC Berkeley, Summer 2012sevtenPas encore d'évaluation
- Math For Machine Learning: 1.1 Differential CalculusDocument21 pagesMath For Machine Learning: 1.1 Differential CalculusjoekowalskyPas encore d'évaluation
- Mathematics TDocument97 pagesMathematics TPh'ng Jiun YanPas encore d'évaluation
- in This Case The NTH Order Approximation of F (X) Is of The C X + C X X C XDocument9 pagesin This Case The NTH Order Approximation of F (X) Is of The C X + C X X C XBalqis YafisPas encore d'évaluation
- Factor TheoremDocument6 pagesFactor TheoremEazy Tip'ZPas encore d'évaluation
- Types of Functions: 1 PolynomialsDocument9 pagesTypes of Functions: 1 PolynomialsZara MalikPas encore d'évaluation
- Types of Functions - TypesofFunctionsDocument9 pagesTypes of Functions - TypesofFunctionsZara MalikPas encore d'évaluation
- PMA307: Metric Spaces: F (X) X+ XDocument5 pagesPMA307: Metric Spaces: F (X) X+ XTom DavisPas encore d'évaluation
- Functions 11-TD A (Group 4)Document20 pagesFunctions 11-TD A (Group 4)racheal joyPas encore d'évaluation
- Lesson 1 - Gen MathDocument11 pagesLesson 1 - Gen MathAaliyah MabalotPas encore d'évaluation
- 10-701/15-781, Machine Learning: Homework 1: Aarti Singh Carnegie Mellon UniversityDocument6 pages10-701/15-781, Machine Learning: Homework 1: Aarti Singh Carnegie Mellon Universitytarun guptaPas encore d'évaluation
- SsDocument3 pagesSscristinejoydalag3Pas encore d'évaluation
- Ch2 Interpolation 2022Document27 pagesCh2 Interpolation 2022SK. BayzeedPas encore d'évaluation
- Exponential FormsDocument4 pagesExponential FormsWella Wella WellaPas encore d'évaluation
- Visualizing The Components of Lagrange and Newton InterpolationDocument17 pagesVisualizing The Components of Lagrange and Newton InterpolationjemuelPas encore d'évaluation
- Impossibility Theorems For Elementary Integration: Brian ConradDocument13 pagesImpossibility Theorems For Elementary Integration: Brian Conradbikis2008Pas encore d'évaluation
- PH-213 Chapter-33 Index of Refraction Depends On FrequencyDocument18 pagesPH-213 Chapter-33 Index of Refraction Depends On FrequencyPatrick SibandaPas encore d'évaluation
- PH-213 Chapter-33 Energy Transport and The Poynting VectorDocument6 pagesPH-213 Chapter-33 Energy Transport and The Poynting VectorPatrick SibandaPas encore d'évaluation
- Tut4 PHY101 2018Document1 pageTut4 PHY101 2018Patrick SibandaPas encore d'évaluation
- PH-213 Chapter-33 Energy Transport and The Poynting Vector PDFDocument20 pagesPH-213 Chapter-33 Energy Transport and The Poynting Vector PDFPatrick SibandaPas encore d'évaluation
- PH-223 La Rosa Lecture 13 PDFDocument39 pagesPH-223 La Rosa Lecture 13 PDFPatrick SibandaPas encore d'évaluation
- PH-223 La Rosa Lecture 14 Part-ADocument15 pagesPH-223 La Rosa Lecture 14 Part-APatrick SibandaPas encore d'évaluation
- PH-213 Chapter-33 Energy Transport and The Poynting VectorDocument20 pagesPH-213 Chapter-33 Energy Transport and The Poynting VectorPatrick SibandaPas encore d'évaluation
- Notes 2013 Complex Numbers For Exp RLC SeriesDocument18 pagesNotes 2013 Complex Numbers For Exp RLC SeriesPatrick SibandaPas encore d'évaluation
- IntroDocument18 pagesIntroPatrick SibandaPas encore d'évaluation
- Sample Exam-1 Phys-213 PDFDocument7 pagesSample Exam-1 Phys-213 PDFPatrick SibandaPas encore d'évaluation
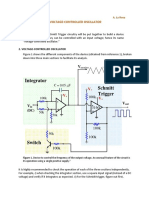
- 2018 Lab 5B Voltage-Controlled - OscillatorDocument4 pages2018 Lab 5B Voltage-Controlled - OscillatorPatrick SibandaPas encore d'évaluation
- Sample Exam 2 Phys 213Document8 pagesSample Exam 2 Phys 213Patrick SibandaPas encore d'évaluation
- PH-223 La Rosa Lecture 14 Part-BDocument48 pagesPH-223 La Rosa Lecture 14 Part-BPatrick SibandaPas encore d'évaluation
- 2018 Exp RLC SeriesDocument19 pages2018 Exp RLC SeriesPatrick SibandaPas encore d'évaluation
- 2018 PH315 Mat Lab Simulator For RLC Circuits.Document1 page2018 PH315 Mat Lab Simulator For RLC Circuits.Patrick SibandaPas encore d'évaluation
- 2018 Lab 5A Positive Feedback and Operational AmplifiersDocument2 pages2018 Lab 5A Positive Feedback and Operational AmplifiersPatrick SibandaPas encore d'évaluation
- 2018 Lab 5A Positive Feedback and Operational AmplifiersDocument15 pages2018 Lab 5A Positive Feedback and Operational AmplifiersPatrick SibandaPas encore d'évaluation
- Statutory Instruments 17: The Zambia Qualifications Authority Act, 2011Document19 pagesStatutory Instruments 17: The Zambia Qualifications Authority Act, 2011Patrick SibandaPas encore d'évaluation
- 2018 Lab 4B Digital To Analog ConverterDocument5 pages2018 Lab 4B Digital To Analog ConverterPatrick SibandaPas encore d'évaluation
- Introduction To Numerical Analysis II: Solving Linear SystemDocument28 pagesIntroduction To Numerical Analysis II: Solving Linear SystemPatrick SibandaPas encore d'évaluation
- NewtonDocument16 pagesNewtonPatrick SibandaPas encore d'évaluation
- 2018 Lab 5A Positive Feedback and Operational AmplifiersDocument2 pages2018 Lab 5A Positive Feedback and Operational AmplifiersPatrick SibandaPas encore d'évaluation
- KrylovDocument46 pagesKrylovPatrick SibandaPas encore d'évaluation
- IntroductionDocument7 pagesIntroductionPatrick SibandaPas encore d'évaluation
- Ch06 PDFDocument52 pagesCh06 PDFPatrick SibandaPas encore d'évaluation
- Hermite Interpolation: Week 10: Monday, Apr 2Document4 pagesHermite Interpolation: Week 10: Monday, Apr 2Harshavardhan ReddyPas encore d'évaluation
- CH 05Document46 pagesCH 05Patrick SibandaPas encore d'évaluation
- CH 04Document77 pagesCH 04Patrick SibandaPas encore d'évaluation
- Chapter 11: Special Theory of Relativity: (Ref.: Marion & Heald, "Classical Electromagnetic Radiation," 3rd Ed., Ch. 14)Document73 pagesChapter 11: Special Theory of Relativity: (Ref.: Marion & Heald, "Classical Electromagnetic Radiation," 3rd Ed., Ch. 14)Patrick SibandaPas encore d'évaluation
- SocialPolitical and Cultural ChangeDocument8 pagesSocialPolitical and Cultural ChangeChristine Mae BeramoPas encore d'évaluation
- Cottrell Park Golf Club 710Document11 pagesCottrell Park Golf Club 710Mulligan PlusPas encore d'évaluation
- Ayaw at GustoDocument4 pagesAyaw at GustoJed VillaluzPas encore d'évaluation
- Kentucky Economic Development Guide 2010Document130 pagesKentucky Economic Development Guide 2010Journal CommunicationsPas encore d'évaluation
- Ca Final Compiler Paper 5 Advanced Management Accounting PDFDocument432 pagesCa Final Compiler Paper 5 Advanced Management Accounting PDFAnn SerratoPas encore d'évaluation
- Thesis Final 2 Number c1-c5Document167 pagesThesis Final 2 Number c1-c5Kimverly DomaganPas encore d'évaluation
- Effect of Social Economic Factors On Profitability of Soya Bean in RwandaDocument7 pagesEffect of Social Economic Factors On Profitability of Soya Bean in RwandaMarjery Fiona ReyesPas encore d'évaluation
- Sa Inc HCP English d10840Document64 pagesSa Inc HCP English d10840Ayu AfiantyPas encore d'évaluation
- Pengaruh Promosi Dan Brand Image (Citra Produk) Terhadap Loyalitas Pembelian Produk Pepsodent Di Ramayana Plaza, Jalan Aksara, Medan Dita AmanahDocument13 pagesPengaruh Promosi Dan Brand Image (Citra Produk) Terhadap Loyalitas Pembelian Produk Pepsodent Di Ramayana Plaza, Jalan Aksara, Medan Dita AmanahAhmad HerdandiPas encore d'évaluation
- Andre Bazin, The Ontology of The Photographic Image From His Book What Is Cinema Vol. IDocument8 pagesAndre Bazin, The Ontology of The Photographic Image From His Book What Is Cinema Vol. IAnkit LadiaPas encore d'évaluation
- Structure of An Atom Revision PaperDocument5 pagesStructure of An Atom Revision PaperZoe Kim ChinguwaPas encore d'évaluation
- Culture NegotiationsDocument17 pagesCulture NegotiationsShikha SharmaPas encore d'évaluation
- Bleeding Disorders in Pregnancy: Table 1Document7 pagesBleeding Disorders in Pregnancy: Table 1KharismaNisaPas encore d'évaluation
- Hatchery Practice: InternationalDocument40 pagesHatchery Practice: Internationalabhe prasetyaPas encore d'évaluation
- Working With Hierarchies External V08Document9 pagesWorking With Hierarchies External V08Devesh ChangoiwalaPas encore d'évaluation
- Unit 6 Selected and Short AnswersDocument19 pagesUnit 6 Selected and Short Answersbebepic355Pas encore d'évaluation
- Model Questions and Answers Macro EconomicsDocument14 pagesModel Questions and Answers Macro EconomicsVrkPas encore d'évaluation
- Free Vibration of SDOFDocument2 pagesFree Vibration of SDOFjajajajPas encore d'évaluation
- ErtlDocument64 pagesErtlManpreet SinghPas encore d'évaluation
- Entropy (Information Theory)Document17 pagesEntropy (Information Theory)joseph676Pas encore d'évaluation
- State Partnership Program 101 Brief (Jan 2022)Document7 pagesState Partnership Program 101 Brief (Jan 2022)Paulo FranciscoPas encore d'évaluation
- TSM 101 Course Outline (2022)Document2 pagesTSM 101 Course Outline (2022)ChryseanjPas encore d'évaluation
- RULE 130 Rules of CourtDocument141 pagesRULE 130 Rules of CourtalotcepilloPas encore d'évaluation
- 7th Nani Palkhiwala Research Paper CompetitionDocument31 pages7th Nani Palkhiwala Research Paper CompetitionhridhaykhuranaPas encore d'évaluation
- Egalitarianism As UK: Source: Hofstede Insights, 2021Document4 pagesEgalitarianism As UK: Source: Hofstede Insights, 2021kamalpreet kaurPas encore d'évaluation
- Future Scope and ConclusionDocument13 pagesFuture Scope and ConclusionGourab PalPas encore d'évaluation