Vous aimerez peut-être aussi
- C15 Recommendations Manifolds Refrigerated Liquefied Natural Gas Carriers - Ed. 1994Document12 pagesC15 Recommendations Manifolds Refrigerated Liquefied Natural Gas Carriers - Ed. 1994Hihachi Esconde Michima0% (1)
- Amends To SDs 2011Document214 pagesAmends To SDs 2011duaankushPas encore d'évaluation
- MSC Circ.456 Stabilty CriteriaDocument22 pagesMSC Circ.456 Stabilty CriteriapuddisaaliPas encore d'évaluation
- Unit-5 Design of Belt DrivesDocument39 pagesUnit-5 Design of Belt DrivesCHANDRASEKARANPas encore d'évaluation
- SPS Code ComplianceDocument5 pagesSPS Code ComplianceA. Vamsi Krishna100% (1)
- Design Data HandbookDocument21 pagesDesign Data HandbookSourabh PradhanPas encore d'évaluation
- Isbn9789526032122 PDFDocument256 pagesIsbn9789526032122 PDFcmc2611850% (1)
- Tautwire MK 15BDocument38 pagesTautwire MK 15BValentin JonovPas encore d'évaluation
- MSC.267 (85) Adoption Int Code On Intact StabilityDocument94 pagesMSC.267 (85) Adoption Int Code On Intact StabilityAfdnam StnadactnamPas encore d'évaluation
- Technical Specification For NDC 40 NO Rescue Boat DavitDocument7 pagesTechnical Specification For NDC 40 NO Rescue Boat DavitSRARPas encore d'évaluation
- Maheswaran Jeron PDFDocument228 pagesMaheswaran Jeron PDFRohan KarandePas encore d'évaluation
- Shafting SystemDocument9 pagesShafting SystemKariem ZakiPas encore d'évaluation
- Stability-Manual PDFDocument375 pagesStability-Manual PDFLe ChinhPas encore d'évaluation
- 12-385 Item 01 - MonitorDocument20 pages12-385 Item 01 - Monitorleokareyxoxoers100% (1)
- W33 Non-Destructive Testing of Ship Hull Steel Welds W33Document14 pagesW33 Non-Destructive Testing of Ship Hull Steel Welds W33Erick CostaPas encore d'évaluation
- Lehm0028 00Document4 pagesLehm0028 00Aidel MustafaPas encore d'évaluation
- Bukh DV 36-48 Workshop ManualDocument196 pagesBukh DV 36-48 Workshop Manualasaturday85Pas encore d'évaluation
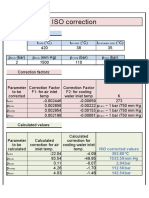
- Iso CorrectionDocument2 pagesIso CorrectionValeriy DomashenkoPas encore d'évaluation
- Accessories enDocument24 pagesAccessories enDian PramadiPas encore d'évaluation
- Abs Rules Steel Vessels Under 90 MtsDocument254 pagesAbs Rules Steel Vessels Under 90 MtsDavid EgasPas encore d'évaluation
- IMO CatalogueDocument115 pagesIMO CataloguejessiemartinPas encore d'évaluation
- Oil and Gas Processing Systems: Offshore Standard DNV-OS-E201Document51 pagesOil and Gas Processing Systems: Offshore Standard DNV-OS-E201TIZIANO CIVIDINOPas encore d'évaluation
- Sound Generated AerodynamicallyDocument33 pagesSound Generated AerodynamicallyAbraham Benjamin Britto100% (1)
- NES 304 Part 2-Shafting Auxiliaries PDFDocument36 pagesNES 304 Part 2-Shafting Auxiliaries PDFSameer Salvi100% (1)
- Draft Mark Correction CalculatorDocument1 pageDraft Mark Correction CalculatorCan T. ErbayPas encore d'évaluation
- Rules 4 Medical ShipsDocument32 pagesRules 4 Medical ShipsAravind RamachandranPas encore d'évaluation
- Ship Vibration GN E-Jan15 PDFDocument83 pagesShip Vibration GN E-Jan15 PDFDwi PramonoPas encore d'évaluation
- MT Mosunmola Stern Tube Seal Service Report FinalDocument10 pagesMT Mosunmola Stern Tube Seal Service Report FinalNevzat AlkoçPas encore d'évaluation
- Chapter 6ADocument22 pagesChapter 6Amaninder_khasria100% (3)
- Calculation of Vapor Pressure of A Gas MixtureDocument1 pageCalculation of Vapor Pressure of A Gas MixtureΓεωργια ΛεμενιτακηPas encore d'évaluation
- Teras Genesis-Specs GA PDFDocument2 pagesTeras Genesis-Specs GA PDFthugsdeiPas encore d'évaluation
- Draft Survey CalculationDocument20 pagesDraft Survey CalculationAlex QuinteroPas encore d'évaluation
- Compare Ansi Asme-FemDocument8 pagesCompare Ansi Asme-FemMiftakhu ZaimPas encore d'évaluation
- Class Notations (LR)Document4 pagesClass Notations (LR)Swayamjeet BeheraPas encore d'évaluation
- Standard Equipment GuideDocument4 pagesStandard Equipment GuideSyed Mujtaba Ali BukhariPas encore d'évaluation
- SL01 397Document2 pagesSL01 397thiseus25Pas encore d'évaluation
- Doc. No. 15 - 42 09 050 - FODocument44 pagesDoc. No. 15 - 42 09 050 - FOdirgan_udyanaPas encore d'évaluation
- Water Mist MSC - Circ. 1165 - tcm4-166351Document5 pagesWater Mist MSC - Circ. 1165 - tcm4-166351grenjithPas encore d'évaluation
- EJ pdf0Document20 pagesEJ pdf0Yogendran GanesanPas encore d'évaluation
- Calculation and Specification of Bilge System: Design Iv Machinery System Department of Marine EngineeringDocument36 pagesCalculation and Specification of Bilge System: Design Iv Machinery System Department of Marine EngineeringAfanda Dwi R RPas encore d'évaluation
- Mechanical Specifications For Fiberbond ProductDocument8 pagesMechanical Specifications For Fiberbond ProducthasnizaPas encore d'évaluation
- G Lake TravelliftDocument2 pagesG Lake TravelliftabdulanisPas encore d'évaluation
- c2g Pump BrochureDocument8 pagesc2g Pump Brochuretyutyu0% (1)
- 5.1 Axial Flow Fans: Hi-Pres Marine & OffshoreDocument58 pages5.1 Axial Flow Fans: Hi-Pres Marine & OffshoreDinesh Pillai100% (1)
- Cylinder Lubricator Unit Cylinder Lubricator Unit Cylinder Lubricator Unit Cylinder Lubricator Unit Cylinder Lubricator UnitDocument2 pagesCylinder Lubricator Unit Cylinder Lubricator Unit Cylinder Lubricator Unit Cylinder Lubricator Unit Cylinder Lubricator UnitFaustoJuniorPas encore d'évaluation
- Angle of Deck Edge ImmersionDocument1 pageAngle of Deck Edge ImmersionyuniardimzPas encore d'évaluation
- M/V Kirwan': Off-Hire Bunker Survey at Umm Qasr, IraqDocument11 pagesM/V Kirwan': Off-Hire Bunker Survey at Umm Qasr, IraqSabah AlwanPas encore d'évaluation
- Lammeren W P A.Wageningen B-Screw S.1969.TRANS PDFDocument49 pagesLammeren W P A.Wageningen B-Screw S.1969.TRANS PDFStefanoPas encore d'évaluation
- Oils: Diesel: Cautionary Response InformationDocument2 pagesOils: Diesel: Cautionary Response InformationMarco SantiagoPas encore d'évaluation
- En-FAB Metering & Measurement 2016 BrochureDocument58 pagesEn-FAB Metering & Measurement 2016 Brochurecarmel BarrettPas encore d'évaluation
- Optimized Design For TSHDs Swell CompensatorDocument13 pagesOptimized Design For TSHDs Swell CompensatorTomasz FelknerPas encore d'évaluation
- ABS Rule Part4 Chapter6 Section1Document8 pagesABS Rule Part4 Chapter6 Section1Kamil AdliPas encore d'évaluation
- Understanding Conventions, Protocols & Amendments: International Maritime Organization (IMO)Document3 pagesUnderstanding Conventions, Protocols & Amendments: International Maritime Organization (IMO)sbdmanPas encore d'évaluation
- Catalog Vinciuri IMATRANSDocument18 pagesCatalog Vinciuri IMATRANSVlad AndronachePas encore d'évaluation
- Power Press Design, BrakesDocument9 pagesPower Press Design, Brakeszeynell70100% (2)
- Gearhead Selection-Application GuidelinesDocument2 pagesGearhead Selection-Application GuidelinesKarim FawziPas encore d'évaluation
- Basic Motor Formulas and Calculations PDFDocument11 pagesBasic Motor Formulas and Calculations PDFAditya Shrivastava100% (2)
- Torque and Inertia CalculationsDocument20 pagesTorque and Inertia Calculationsmanfredm6435Pas encore d'évaluation
- PND1000-3 Technical DataDocument10 pagesPND1000-3 Technical DataPartsGopher.comPas encore d'évaluation
- Stepper Motors Synchronous Motors Technical AppendixDocument5 pagesStepper Motors Synchronous Motors Technical AppendixCARLOSWAR101Pas encore d'évaluation
- Lubricants For Wingd Engines v6Document31 pagesLubricants For Wingd Engines v6nikospg9427Pas encore d'évaluation
- Basic Principle of Ship PropulsionDocument45 pagesBasic Principle of Ship PropulsionShengte Hsu100% (7)
- PRI GuidanceDocument2 pagesPRI Guidancenikospg9427Pas encore d'évaluation
- Marine Diesels Co UkDocument149 pagesMarine Diesels Co Ukvmedica94% (32)
- Basic Principles of Ship PropulsionDocument30 pagesBasic Principles of Ship Propulsiongeorgekanellakis5830100% (20)
- Outflow PerformanceDocument2 pagesOutflow PerformanceMuhammad MujahidPas encore d'évaluation
- Questions For QA QC CivilDocument6 pagesQuestions For QA QC CivilButch Capistrano71% (7)
- 1 Introduction-IDocument28 pages1 Introduction-ILakshya SaxenaPas encore d'évaluation
- Identification of BR and NBR Using A TGA-FTIR Combination: PurposeDocument4 pagesIdentification of BR and NBR Using A TGA-FTIR Combination: Purposelely dwiPas encore d'évaluation
- JNK Heaters Co - LTD: Ferrite Test ReportDocument1 pageJNK Heaters Co - LTD: Ferrite Test ReportUzorPas encore d'évaluation
- Scanning Electron Microscopy and X-Ray Microanalysis: Book ReviewDocument1 pageScanning Electron Microscopy and X-Ray Microanalysis: Book Review平Pas encore d'évaluation
- Measurement of Atmospheric Composition: This Chapter Substitutes Chapters 16 and 17 of The Previous EditionDocument34 pagesMeasurement of Atmospheric Composition: This Chapter Substitutes Chapters 16 and 17 of The Previous Editionzeeshan ahmadPas encore d'évaluation
- 4.0 CM 4.2 CM 4.4 CM 4.6 CMDocument1 page4.0 CM 4.2 CM 4.4 CM 4.6 CMisturmanPas encore d'évaluation
- Emulsion Polymerization of Acrylonitrile PDFDocument4 pagesEmulsion Polymerization of Acrylonitrile PDFWalid AdnanPas encore d'évaluation
- Instrument Air CalculationDocument11 pagesInstrument Air CalculationMohammad Mehdi Jafari67% (3)
- Importance of Dimensionless Numbers in Mass TransferDocument27 pagesImportance of Dimensionless Numbers in Mass TransferAli AmmarPas encore d'évaluation
- QPAMBSC17Document789 pagesQPAMBSC17jonnaPas encore d'évaluation
- 001 Lifting Lug DesignDocument6 pages001 Lifting Lug Designmshah222Pas encore d'évaluation
- 51CBC Palestra PeterMartiDocument28 pages51CBC Palestra PeterMartimendoncajamPas encore d'évaluation
- AASHTO LRFD Chapter 3Document76 pagesAASHTO LRFD Chapter 3BJERPas encore d'évaluation
- Evaluating End Bearing Capacity of Large Cast in Place Bored Piles in Sand Using The Static FormulaDocument21 pagesEvaluating End Bearing Capacity of Large Cast in Place Bored Piles in Sand Using The Static FormulaRachel BushPas encore d'évaluation
- 1Document5 pages1Dee HsPas encore d'évaluation
- Service Manual Scm-Za 4room enDocument65 pagesService Manual Scm-Za 4room enJaume Ambros EspuñaPas encore d'évaluation
- Chemical Technology Subject Code: CH2001Document17 pagesChemical Technology Subject Code: CH2001U SANKAR TEJOPas encore d'évaluation
- Resnick & Halliday Part - 1Document737 pagesResnick & Halliday Part - 1Debarun Patra75% (4)
- NASA Facts Earth Observing System Microwave Limb SounderDocument4 pagesNASA Facts Earth Observing System Microwave Limb SounderBob AndrepontPas encore d'évaluation
- Guaranteed Technical Particulars Guaranteed: ACCC Casablanca ACCC CasablancaDocument5 pagesGuaranteed Technical Particulars Guaranteed: ACCC Casablanca ACCC CasablancabinodePas encore d'évaluation
- Seismic Design of Water TanksDocument17 pagesSeismic Design of Water TanksJeevan ReddyPas encore d'évaluation
- 3.13 - Vectors WorksheetDocument2 pages3.13 - Vectors Worksheetdilsharakavi100% (1)
- Particle Motion Lab-3Document2 pagesParticle Motion Lab-3api-249777358Pas encore d'évaluation
- MT Lab ManualDocument80 pagesMT Lab ManualragluckPas encore d'évaluation
- Grade 7 Science FinalDocument19 pagesGrade 7 Science FinalHazel Escobio Justol CahucomPas encore d'évaluation
- IPGA Seminar Abstract BookDocument1 pageIPGA Seminar Abstract BookArindam ChatterjeePas encore d'évaluation
- On The Resonances and Polarizabilities of Split Ring ResonatorsDocument9 pagesOn The Resonances and Polarizabilities of Split Ring ResonatorsNabil DakhliPas encore d'évaluation
- Tuned Liquid Dampers Simulation For EarthquakeDocument18 pagesTuned Liquid Dampers Simulation For EarthquakedaahdadaPas encore d'évaluation