Vous aimerez peut-être aussi
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Portable Biometric Attendance Register: Rajeev Rajkumar Stephen VadakkanDocument4 pagesPortable Biometric Attendance Register: Rajeev Rajkumar Stephen VadakkanrajeevrajkumarPas encore d'évaluation
- Copy-Move Image Forgery Detection Using Normalized Colour Histogram Difference and Scale Invariant Feature TransformDocument8 pagesCopy-Move Image Forgery Detection Using Normalized Colour Histogram Difference and Scale Invariant Feature TransformrajeevrajkumarPas encore d'évaluation
- Alphabeta ExampleDocument38 pagesAlphabeta ExamplerajeevrajkumarPas encore d'évaluation
- Ijrcsit Ncrait 2014 024Document6 pagesIjrcsit Ncrait 2014 024rajeevrajkumarPas encore d'évaluation
- Digital Image Forgery Detection Using SIFT Feature: Rajeev Rajkumar Manglem SinghDocument6 pagesDigital Image Forgery Detection Using SIFT Feature: Rajeev Rajkumar Manglem SinghrajeevrajkumarPas encore d'évaluation
- Artificial Neural Network Based Digital Image Forgery DetectionDocument4 pagesArtificial Neural Network Based Digital Image Forgery DetectionrajeevrajkumarPas encore d'évaluation
- SmimeDocument9 pagesSmimerajeevrajkumarPas encore d'évaluation
- OS - Lecture NotesDocument128 pagesOS - Lecture NotesDhanaraj ShanmugasundaramPas encore d'évaluation
- Congestion ControlDocument18 pagesCongestion ControlToshant KumarPas encore d'évaluation
- Image CompressionDocument111 pagesImage CompressionKuldeep MankadPas encore d'évaluation
- FramingDocument5 pagesFramingPrabin thapaPas encore d'évaluation
- Introduction To Communication Systems and Networks: Dr. Farid Farahmand Updated 8/31/2010Document44 pagesIntroduction To Communication Systems and Networks: Dr. Farid Farahmand Updated 8/31/2010martoomPas encore d'évaluation
- Congestion ControlDocument18 pagesCongestion ControlToshant KumarPas encore d'évaluation
- What Is The Need For Image Compression?Document38 pagesWhat Is The Need For Image Compression?rajeevrajkumarPas encore d'évaluation
- AMME4710 Chap5 ColourIPDocument56 pagesAMME4710 Chap5 ColourIPrajeevrajkumarPas encore d'évaluation
- What Is The Need For Image Compression?Document38 pagesWhat Is The Need For Image Compression?rajeevrajkumarPas encore d'évaluation
- Definition of Computer:: Central Processing Unit (CPU)Document2 pagesDefinition of Computer:: Central Processing Unit (CPU)rajeevrajkumarPas encore d'évaluation
- Definition of Computer:: Central Processing Unit (CPU)Document2 pagesDefinition of Computer:: Central Processing Unit (CPU)rajeevrajkumarPas encore d'évaluation
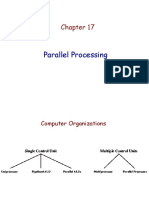
- 15 Parallel ProcessingDocument36 pages15 Parallel ProcessingrajeevrajkumarPas encore d'évaluation
- Transport Layer Protocols: Transmission Control Protocol (TCP)Document20 pagesTransport Layer Protocols: Transmission Control Protocol (TCP)rajeevrajkumarPas encore d'évaluation
- Enhance KnowledgeDocument109 pagesEnhance KnowledgeAnju Gaurav DrallPas encore d'évaluation
- A Chronological Review of Fingerprint ForgeryDocument6 pagesA Chronological Review of Fingerprint Forgeryrajeevrajkumar100% (1)
- Color ModelsDocument81 pagesColor ModelsrajeevrajkumarPas encore d'évaluation
- Chapter VIII Parallel Processor OrganizationsDocument40 pagesChapter VIII Parallel Processor OrganizationsNaveen NekuriPas encore d'évaluation
- Report Analysis of LSB Based Image Steganography Techniques1Document9 pagesReport Analysis of LSB Based Image Steganography Techniques1rajeevrajkumarPas encore d'évaluation
- Difeence DC and GredyDocument11 pagesDifeence DC and GredyrajeevrajkumarPas encore d'évaluation
- CS 6461: Computer Architecture Instruction Level ParallelismDocument41 pagesCS 6461: Computer Architecture Instruction Level ParallelismrajeevrajkumarPas encore d'évaluation
- The PRAM Model and Algorithms: Advanced Topics Spring 2008Document24 pagesThe PRAM Model and Algorithms: Advanced Topics Spring 2008rajeevrajkumarPas encore d'évaluation
- Symbol Table OrganizationDocument9 pagesSymbol Table OrganizationrajeevrajkumarPas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- 10 1109@tpel 2020 3017809Document10 pages10 1109@tpel 2020 3017809randomPas encore d'évaluation
- Reducing Miss PenaltyDocument34 pagesReducing Miss Penaltyi_2loveu32350% (1)
- AlphaSpotHPE700 Manual Rev.2 (02.11) enDocument28 pagesAlphaSpotHPE700 Manual Rev.2 (02.11) enrobrtPas encore d'évaluation
- The Basic Input Output SystemDocument2 pagesThe Basic Input Output SystemLoyd MoralesPas encore d'évaluation
- DP Biometric 14060 DriversDocument159 pagesDP Biometric 14060 Driversberto_716Pas encore d'évaluation
- LCD TV Philips 32hfl3331-93 Tcm3.1alaDocument72 pagesLCD TV Philips 32hfl3331-93 Tcm3.1alapaulrauPas encore d'évaluation
- TVSS (Transient Voltage Surge Suppression) What Is It and Why All of A Sudden Do We Need It?Document12 pagesTVSS (Transient Voltage Surge Suppression) What Is It and Why All of A Sudden Do We Need It?Jecer Casipong NuruddinPas encore d'évaluation
- VFD CmmingDocument60 pagesVFD Cmmingaleem84Pas encore d'évaluation
- Uninterruptible Power Supply UPS: Protect 5.31/xxx-480-220-120 10 kVA - 120 kVADocument61 pagesUninterruptible Power Supply UPS: Protect 5.31/xxx-480-220-120 10 kVA - 120 kVAMIGUEL ALVARO BLASCO MARTINEZPas encore d'évaluation
- Common Electrical Wire Splices and Joints - Basics About ElectricalDocument6 pagesCommon Electrical Wire Splices and Joints - Basics About ElectricalRey Raphael Tarriga100% (1)
- Open Core Protocol Specification: Release 2.1 OCP-IP ConfidentialDocument240 pagesOpen Core Protocol Specification: Release 2.1 OCP-IP ConfidentialBalaramkishore GangireddyPas encore d'évaluation
- OM201311Conext Core XC-NA Operating Manual (990-5145 - Rev-)Document96 pagesOM201311Conext Core XC-NA Operating Manual (990-5145 - Rev-)bianca7sallesPas encore d'évaluation
- A2 38+thermal+modellingDocument57 pagesA2 38+thermal+modellingblem_0075Pas encore d'évaluation
- Max31855 PDFDocument13 pagesMax31855 PDFAlfredoSanchezPlaPas encore d'évaluation
- Eeng 7025 Satellite Communication Technology: - Chapter 3 Link Calculations and DesignDocument21 pagesEeng 7025 Satellite Communication Technology: - Chapter 3 Link Calculations and DesignNahum SetuPas encore d'évaluation
- AMO Product Overview CatalogDocument11 pagesAMO Product Overview CatalogElectromatePas encore d'évaluation
- Lad-04 Fesco Order 09-01-2024 282Document12 pagesLad-04 Fesco Order 09-01-2024 282usmandatariPas encore d'évaluation
- MATLAB and Simulink Modelling of A Full State Observer Controller of Armature Controlled and Field Controlled DC Motor Using State Space ApproachDocument8 pagesMATLAB and Simulink Modelling of A Full State Observer Controller of Armature Controlled and Field Controlled DC Motor Using State Space ApproachNitsuga PomeloréPas encore d'évaluation
- User manual-BMC-Highflow Series MachineDocument50 pagesUser manual-BMC-Highflow Series MachineСергей Букша100% (1)
- TK302 - Eagle R45.0 EPAP R15.0 - V6.0Document261 pagesTK302 - Eagle R45.0 EPAP R15.0 - V6.0Fred_SPbPas encore d'évaluation
- Electrical MotorDocument4 pagesElectrical Motorlyheang100% (4)
- Ink Viscosity Tester KVST-12 Operation Manual: Serial No.Document10 pagesInk Viscosity Tester KVST-12 Operation Manual: Serial No.liebofreakPas encore d'évaluation
- st-200 ProDocument132 pagesst-200 ProAndres TapiaPas encore d'évaluation
- Laboratory Evaluation of Magnesium Sacrificial Anode Test Specimens For Underground ApplicationsDocument4 pagesLaboratory Evaluation of Magnesium Sacrificial Anode Test Specimens For Underground ApplicationsPippo100% (1)
- Assembly-Level Service Guide Counter 53132ADocument252 pagesAssembly-Level Service Guide Counter 53132AJhonSebastianGarcia100% (1)
- Application Guidelines MEEPEDocument2 pagesApplication Guidelines MEEPEavionicsnabinPas encore d'évaluation
- EXFO FTB-1 700G-800 Series Net Blazzer User GuideDocument673 pagesEXFO FTB-1 700G-800 Series Net Blazzer User GuideMohammadBakirPas encore d'évaluation
- ACDC Pages 177-192 (Low Res) PDFDocument16 pagesACDC Pages 177-192 (Low Res) PDFmachevalliePas encore d'évaluation
- LNCTGroup Data Login IDs - For DisplayDocument18 pagesLNCTGroup Data Login IDs - For DisplaySiddharth NagayachPas encore d'évaluation
- Cathodic Protection For Tank Bottoms (Underside)Document28 pagesCathodic Protection For Tank Bottoms (Underside)Ali Raza Kaisrani100% (1)