Vous aimerez peut-être aussi
- 6th Central Pay Commission Salary CalculatorDocument15 pages6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Care and Maintenance of Induction MotorDocument106 pagesCare and Maintenance of Induction Motorhprabowo100% (2)
- Ac Motors: Harry PrabowoDocument109 pagesAc Motors: Harry Prabowohprabowo100% (1)
- Selecting A Flow MeterDocument3 pagesSelecting A Flow MeterRBZPas encore d'évaluation
- ABB Transformer HandbookDocument213 pagesABB Transformer HandbookDragan Gigi100% (2)
- ATP ManualDocument270 pagesATP ManualJose Jorge Fontalvo100% (1)
- Rotating Machine Failure Modes & CausesDocument11 pagesRotating Machine Failure Modes & CauseshprabowoPas encore d'évaluation
- Engineering & Technology - Gravimetric Feeder ControlsDocument7 pagesEngineering & Technology - Gravimetric Feeder ControlshprabowoPas encore d'évaluation
- Failure Modes and Root Causes in Induction MachinesDocument11 pagesFailure Modes and Root Causes in Induction MachineshprabowoPas encore d'évaluation
- G.K.mcmillan - IsA - Good Tuning PID (A Pocket Guide)Document120 pagesG.K.mcmillan - IsA - Good Tuning PID (A Pocket Guide)KALATUSPas encore d'évaluation
- Ac Motors: Harry PrabowoDocument109 pagesAc Motors: Harry Prabowohprabowo100% (1)
- Advanced Control UnleashedDocument14 pagesAdvanced Control UnleashedhprabowoPas encore d'évaluation
- Good - and - Bad - of - Mini - Hydro - Power - Vol 1 PDFDocument168 pagesGood - and - Bad - of - Mini - Hydro - Power - Vol 1 PDFGerson Alfredo Silva JaraPas encore d'évaluation
- Brugg Cables User GuideDocument27 pagesBrugg Cables User GuideMehdi_Mashayekhi_172Pas encore d'évaluation
- LTH Iea 1067 PDFDocument171 pagesLTH Iea 1067 PDFhprabowoPas encore d'évaluation
- Good and Bad of Mini Hydro Power Vol.2Document78 pagesGood and Bad of Mini Hydro Power Vol.2Rehmani Mehboob100% (1)
- Partial Discharge Theory and Applications To Electrical SystemsDocument15 pagesPartial Discharge Theory and Applications To Electrical Systemsreza515heiPas encore d'évaluation
- (Isidor Kerszenbaum) Inspection of Large SynchronoDocument190 pages(Isidor Kerszenbaum) Inspection of Large Synchronohprabowo100% (1)
- DVR2000EPlus IOM GPN046Document80 pagesDVR2000EPlus IOM GPN046Fernando MendozaPas encore d'évaluation
- Pub 119 Earthing PracticeDocument108 pagesPub 119 Earthing Practicecosmin75Pas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5782)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (72)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Power Supply CircuitsDocument6 pagesPower Supply CircuitsJean GrandePas encore d'évaluation
- Qexam PDFDocument77 pagesQexam PDFNarendrakumar ReddyPas encore d'évaluation
- Application Note: KVP Measurements On Ge Amx-4Document15 pagesApplication Note: KVP Measurements On Ge Amx-4Bashir MtwaklPas encore d'évaluation
- EPD Lab#9Document8 pagesEPD Lab#9Muhammad ShaheerPas encore d'évaluation
- Tims-301 User Manual: Telecommunications Instructional Modelling SystemDocument31 pagesTims-301 User Manual: Telecommunications Instructional Modelling SystemMudzrika FarianaPas encore d'évaluation
- Tny 280Document24 pagesTny 280Diego RodriguezPas encore d'évaluation
- Unit 3Document40 pagesUnit 3Venkat ChadalavadaPas encore d'évaluation
- EE254: D2 Buck ConverterDocument13 pagesEE254: D2 Buck ConverterNeil Hildick-SmithPas encore d'évaluation
- 12 Pulse Rectifier PDFDocument8 pages12 Pulse Rectifier PDFBhanu ThestarPas encore d'évaluation
- Rectifier CalculationDocument2 pagesRectifier CalculationAnonymous DjWqKpZ1Pas encore d'évaluation
- MOSFET Power Losses Calculation Using The Data-Sheet ParametersDocument23 pagesMOSFET Power Losses Calculation Using The Data-Sheet ParametersElvis Yu0% (1)
- AD210Document8 pagesAD210roozbehxoxPas encore d'évaluation
- Topic 9Document11 pagesTopic 9Cj GamingPas encore d'évaluation
- Space Vector Modulation - An Introduction - TutoriDocument11 pagesSpace Vector Modulation - An Introduction - TutorileonardoPas encore d'évaluation
- And8490 DDocument42 pagesAnd8490 DMihai GrosuPas encore d'évaluation
- Diode Circuit Applications Lab GuideDocument11 pagesDiode Circuit Applications Lab GuideSonDinhQuangPas encore d'évaluation
- DC-DC Part 6 DoubleDocument18 pagesDC-DC Part 6 DoubleDefne AktemizPas encore d'évaluation
- Harmonic Analysis of 6-Pulse and 12-Pulse ConvertersDocument6 pagesHarmonic Analysis of 6-Pulse and 12-Pulse ConvertersAshish JadhavPas encore d'évaluation
- Nautical ScienceDocument39 pagesNautical ScienceDheerajKaushalPas encore d'évaluation
- CH1 - Module2 - Diode AppDocument56 pagesCH1 - Module2 - Diode AppParidhi kothariPas encore d'évaluation
- Murata Products Crystal Filters P51eDocument63 pagesMurata Products Crystal Filters P51ealltheloveintheworldPas encore d'évaluation
- Toshiba's TA8211AH Dual Audio Power Amplifier ICDocument10 pagesToshiba's TA8211AH Dual Audio Power Amplifier ICtrismardiwPas encore d'évaluation
- Ieee 11 Maquinas Rotativas VehiculosDocument39 pagesIeee 11 Maquinas Rotativas VehiculosIvan FlorezPas encore d'évaluation
- Steady-State Analysis and Design of A Switched-Capacitor DC-DC ConverterDocument10 pagesSteady-State Analysis and Design of A Switched-Capacitor DC-DC ConverterNitu VlsiPas encore d'évaluation
- 5A Adjustable Regulated Power Supply PDFDocument1 page5A Adjustable Regulated Power Supply PDFEdgar AdonisPas encore d'évaluation
- Performance + Reliability + Flexibility. It All Adds Up To PowerDocument4 pagesPerformance + Reliability + Flexibility. It All Adds Up To PowerCamel FangPas encore d'évaluation
- Diodes and Rectifiers in Power ElectronicsDocument38 pagesDiodes and Rectifiers in Power ElectronicsFawzi Radwan100% (1)
- Digital CalendarDocument58 pagesDigital Calendarmgitecetech100% (8)
- CH 4 - DC-DC ConvertersDocument52 pagesCH 4 - DC-DC ConvertersTsegau Hagos100% (1)
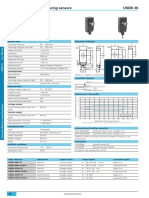
- Baumer Undk 30 Series Catalog Pages 02 11 15 2480Document4 pagesBaumer Undk 30 Series Catalog Pages 02 11 15 2480black02aPas encore d'évaluation