Vous aimerez peut-être aussi
- Stepper Motor Interfacing With Microcontroller TutorialDocument15 pagesStepper Motor Interfacing With Microcontroller TutorialChakkaravarthiEr100% (1)
- Stepper Motor - Parallel Port Interface by Jose Rene Flores and Jaime ZavalaDocument18 pagesStepper Motor - Parallel Port Interface by Jose Rene Flores and Jaime ZavalaMufasa SiddiquiPas encore d'évaluation
- Lab 4 Stepper Motor PDFDocument10 pagesLab 4 Stepper Motor PDFIrfan HaiderPas encore d'évaluation
- Stepper MotorDocument9 pagesStepper MotorHasan Mahmood100% (1)
- Solid State Controller of Drives - ExperimentDocument37 pagesSolid State Controller of Drives - ExperimentRakesh Singh LodhiPas encore d'évaluation
- Report Interfacing of Stepper Motor With Microcontroller 8051Document14 pagesReport Interfacing of Stepper Motor With Microcontroller 8051Uday A Korat50% (4)
- KKKL3293 - Sem 1 20212022 - Lab 4 - Stepper MotorDocument7 pagesKKKL3293 - Sem 1 20212022 - Lab 4 - Stepper MotorPRASAATH A/L BALAKRISHNANPas encore d'évaluation
- Controlling DC Motor With Arduino and l293d ChipDocument6 pagesControlling DC Motor With Arduino and l293d ChipGirish ChopraPas encore d'évaluation
- Micro Controller Base Satelite TrackingDocument67 pagesMicro Controller Base Satelite TrackingYuvraj ChaudhariPas encore d'évaluation
- Ch6 - A Stepper MotorDocument5 pagesCh6 - A Stepper MotorEdward Conal100% (2)
- Stepper Motor TutorialDocument6 pagesStepper Motor TutorialengrodePas encore d'évaluation
- Lab 6 ReportDocument27 pagesLab 6 ReportIzzat AzmanPas encore d'évaluation
- Electrical Machine & InstrumentationDocument34 pagesElectrical Machine & InstrumentationJeremy HensleyPas encore d'évaluation
- (212142518) Stepper Motor Control Using MicrocontrollerDocument4 pages(212142518) Stepper Motor Control Using MicrocontrollerraghavthakurjiPas encore d'évaluation
- Arduino Lab 1 - Motor Control ENGN1211 2023Document5 pagesArduino Lab 1 - Motor Control ENGN1211 2023huh lePas encore d'évaluation
- Control A DC Motor With Arduino and l293d ChipDocument6 pagesControl A DC Motor With Arduino and l293d Chipapi-115728880Pas encore d'évaluation
- Arduino Bipolar Stepper Motor Control - Imple ProjectsDocument9 pagesArduino Bipolar Stepper Motor Control - Imple ProjectsSssPas encore d'évaluation
- Lab 3Document6 pagesLab 3Vu LePas encore d'évaluation
- Sage EDM Stepper Conversion Description V2Document4 pagesSage EDM Stepper Conversion Description V2Nacer MezghichePas encore d'évaluation
- If StepDocument23 pagesIf Stepkrishna_cad28Pas encore d'évaluation
- Interface Lab ReportDocument8 pagesInterface Lab ReportSharfuddin ZishanPas encore d'évaluation
- DC Motor Control ExpDocument6 pagesDC Motor Control Expvijesh_anna100% (1)
- Robotic ArmDocument106 pagesRobotic ArmGourav SinglaPas encore d'évaluation
- Jawaharlal Nehru Engineering College: Laboratory ManualDocument36 pagesJawaharlal Nehru Engineering College: Laboratory Manualprathap kumarPas encore d'évaluation
- EXPERIMENT NO 7 To Connect Start and Reverse Direction of IM and DC ShuntDocument4 pagesEXPERIMENT NO 7 To Connect Start and Reverse Direction of IM and DC Shuntsinghsehajdeep388Pas encore d'évaluation
- Eeeb371 Pic Exp6newDocument7 pagesEeeb371 Pic Exp6newSalemAbaad100% (2)
- DL 30130 - Extract From The ManualDocument6 pagesDL 30130 - Extract From The ManuallpestanaPas encore d'évaluation
- Stepper MotorDocument28 pagesStepper MotorK PranavPas encore d'évaluation
- EE 246 Electrical Machines For SE ELDocument42 pagesEE 246 Electrical Machines For SE ELFarah Andleeb SiddiquiPas encore d'évaluation
- Ex1 BrushedDCMotorDocument5 pagesEx1 BrushedDCMotorkewalPas encore d'évaluation
- Assignment-6 DC MotorDocument3 pagesAssignment-6 DC MotornikunjPas encore d'évaluation
- Step 1: Specification, Motor DriverDocument8 pagesStep 1: Specification, Motor DriverAfriPas encore d'évaluation
- 2365 02 l2 202 Handout 25Document2 pages2365 02 l2 202 Handout 25dvm4yfptzmPas encore d'évaluation
- Motor Controllers: See My TutorialDocument9 pagesMotor Controllers: See My Tutorialkutt6tlkuPas encore d'évaluation
- Stepper Motor Control With Cover Page v2Document5 pagesStepper Motor Control With Cover Page v2KARTHIKEYANB 19ME016Pas encore d'évaluation
- The L297 Stepper Motor Controller - AN470 Application NoteDocument17 pagesThe L297 Stepper Motor Controller - AN470 Application Noteferbuifo50% (2)
- EEE430 - PO1 (Students Kit) - TORQUE-SPEED CHARACTERISTICSDocument19 pagesEEE430 - PO1 (Students Kit) - TORQUE-SPEED CHARACTERISTICSMuzamer PuteraPas encore d'évaluation
- "Stepper Motor Control Using Arduino": Minor ProjectDocument22 pages"Stepper Motor Control Using Arduino": Minor ProjectNâwãl KîšhôřPas encore d'évaluation
- I. Summary The Main Principle of The Project and Its Circuits Is To Rotate The Stepper Motor Step Wise at ADocument9 pagesI. Summary The Main Principle of The Project and Its Circuits Is To Rotate The Stepper Motor Step Wise at ADr. RAMESH KUMAR. SPas encore d'évaluation
- Expt No 7 EeeDocument10 pagesExpt No 7 EeeAJ PrincePas encore d'évaluation
- LabBJTandH Bridge UpdateDocument8 pagesLabBJTandH Bridge UpdateAndrew BuckleyPas encore d'évaluation
- LabBJTandH BridgeDocument8 pagesLabBJTandH BridgeAndrew BuckleyPas encore d'évaluation
- Servo ED 4R Instruction ManualDocument68 pagesServo ED 4R Instruction Manual1301041019Pas encore d'évaluation
- L239D DC Motor DriverDocument5 pagesL239D DC Motor DriverAakash SheelvantPas encore d'évaluation
- Control Systems Lab ManualDocument67 pagesControl Systems Lab ManualRockstar Rich100% (1)
- Lab Manual For FEMDDocument35 pagesLab Manual For FEMDpratham.22211592Pas encore d'évaluation
- CSPDocument8 pagesCSPmeghraj01100% (1)
- DC MachinesDocument9 pagesDC MachinesRishan AkalankaPas encore d'évaluation
- Experiment 3Document7 pagesExperiment 3NUR SYAFIQAH BINTI MOHD SHAHIR STUDENTPas encore d'évaluation
- Robot Project JaseungDocument7 pagesRobot Project JaseungGiri MuruganPas encore d'évaluation
- Unit 2 Single Phase Induction Motor - Watermark PDFDocument21 pagesUnit 2 Single Phase Induction Motor - Watermark PDFPalak Jio100% (1)
- Driving Multiple Stepper Motors From A Single DrivDocument2 pagesDriving Multiple Stepper Motors From A Single DrivRahul kumar SablaniyaPas encore d'évaluation
- There Are Few Types of Stepper MotorsDocument41 pagesThere Are Few Types of Stepper Motorsmanoj kumarPas encore d'évaluation
- Em 30 02 01Document25 pagesEm 30 02 01ChanKamMinPas encore d'évaluation
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1D'EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Évaluation : 2.5 sur 5 étoiles2.5/5 (3)
- Power Electronics: Lecture Notes of Power Electronics CourseD'EverandPower Electronics: Lecture Notes of Power Electronics CoursePas encore d'évaluation
- Variable Speed AC Drives with Inverter Output FiltersD'EverandVariable Speed AC Drives with Inverter Output FiltersPas encore d'évaluation
- Power Supply Projects: A Collection of Innovative and Practical Design ProjectsD'EverandPower Supply Projects: A Collection of Innovative and Practical Design ProjectsÉvaluation : 3 sur 5 étoiles3/5 (2)
- Glue Lecture 7 Slides PDFDocument9 pagesGlue Lecture 7 Slides PDFsonti11Pas encore d'évaluation
- Guitar String Tension ExperimentDocument7 pagesGuitar String Tension Experimentsonti11Pas encore d'évaluation
- Control of Mobile Robots: Linear SystemsDocument65 pagesControl of Mobile Robots: Linear Systemssonti11Pas encore d'évaluation
- Lab 9 ManualDocument5 pagesLab 9 Manualsonti11Pas encore d'évaluation
- Cura User-Manual v1.0Document41 pagesCura User-Manual v1.0kaosad75% (4)
- Lab 6 ManualDocument4 pagesLab 6 Manualsonti11Pas encore d'évaluation
- MSP432 DriverLib Users Guide-MSP432P4xx-3 10 00 09Document390 pagesMSP432 DriverLib Users Guide-MSP432P4xx-3 10 00 09sonti11Pas encore d'évaluation
- 09 Twists and WrenchesDocument13 pages09 Twists and Wrenchessonti11Pas encore d'évaluation
- MSP 432 P 401 RDocument157 pagesMSP 432 P 401 RestebanPas encore d'évaluation
- ME4405 Lab 2 Getting Started With CCS Due Date: February 2, 2016Document7 pagesME4405 Lab 2 Getting Started With CCS Due Date: February 2, 2016sonti11Pas encore d'évaluation
- MSP4324x Family Technical Reference ManualDocument802 pagesMSP4324x Family Technical Reference ManualJair PiñerosPas encore d'évaluation
- Poou: Scale 3:2 Isometric ViewDocument1 pagePoou: Scale 3:2 Isometric Viewsonti11Pas encore d'évaluation
- 17jan - Nativeamerica - As PostedDocument66 pages17jan - Nativeamerica - As Postedsonti11Pas encore d'évaluation
- Lomax - Southern Tour: Lomax - Long Way To TravelDocument51 pagesLomax - Southern Tour: Lomax - Long Way To Travelsonti11Pas encore d'évaluation
- EkinodonsoDocument1 pageEkinodonsosonti11Pas encore d'évaluation
- Class 36 More Reform MovementsDocument56 pagesClass 36 More Reform Movementssonti11Pas encore d'évaluation
- Class 39: Towards War: Test Prep: What Happened in Kansas in 1856?Document41 pagesClass 39: Towards War: Test Prep: What Happened in Kansas in 1856?sonti11Pas encore d'évaluation
- Class 7: The Columbian Exchange: Opening Question: What Did You Have For Breakfast Today?Document54 pagesClass 7: The Columbian Exchange: Opening Question: What Did You Have For Breakfast Today?sonti11Pas encore d'évaluation
- Project DescriptionDocument2 pagesProject Descriptionsonti11Pas encore d'évaluation
- William Bradford Anne Hutchinson John Smith Roger Williams George Burroughs Samuel ParrishDocument42 pagesWilliam Bradford Anne Hutchinson John Smith Roger Williams George Burroughs Samuel Parrishsonti11Pas encore d'évaluation
- 15jan - Earliest Americans - As PostedDocument58 pages15jan - Earliest Americans - As Postedsonti11Pas encore d'évaluation
- Infrared Object Position Locator: Oladapo, Opeoluwa AyokunleDocument44 pagesInfrared Object Position Locator: Oladapo, Opeoluwa Ayokunleoopeoluwa_1Pas encore d'évaluation
- MSE310-2016 Lecture Notes 3.0-3.1.5 (Student) PDFDocument63 pagesMSE310-2016 Lecture Notes 3.0-3.1.5 (Student) PDFRanaPas encore d'évaluation
- Adaptive PID Control of A Stepper Motor Driving A Exible RotorDocument10 pagesAdaptive PID Control of A Stepper Motor Driving A Exible RotorMohamed NabilPas encore d'évaluation
- Stepper Motor System Basics AMSDocument13 pagesStepper Motor System Basics AMSSherif EltoukhiPas encore d'évaluation
- 2K14 Group ReportDocument58 pages2K14 Group ReportMuhammad Shoaib RabbaniPas encore d'évaluation
- Stepper Motor BasicsDocument11 pagesStepper Motor BasicsrvpilotPas encore d'évaluation
- HydraRaptor - The Story So FarDocument987 pagesHydraRaptor - The Story So Farjorgewr100% (1)
- Galil 2143 ManualDocument244 pagesGalil 2143 ManualflorginheimerPas encore d'évaluation
- I/ Structure and Operation: Stepper MotorDocument11 pagesI/ Structure and Operation: Stepper MotorTuanVUPas encore d'évaluation
- CNC Interface Board For LPT - NCStudio5Document11 pagesCNC Interface Board For LPT - NCStudio5Fernando QueirozPas encore d'évaluation
- Dire Dawa Institute of Technology: Department of Electrical and Computer EngineeringDocument6 pagesDire Dawa Institute of Technology: Department of Electrical and Computer EngineeringYITBAREKPas encore d'évaluation
- Intro Stepper PDFDocument44 pagesIntro Stepper PDFHansean WidjajaPas encore d'évaluation
- Nippon Pulse 2011 CatalogDocument98 pagesNippon Pulse 2011 CatalogElectromatePas encore d'évaluation
- ES-M V0.0.1d PDFDocument11 pagesES-M V0.0.1d PDFDeepak RainaPas encore d'évaluation
- Cnc-200A User Manual Ver. H8681/3Document14 pagesCnc-200A User Manual Ver. H8681/3Cristiano Martinez100% (1)
- Motores FullingmotorDocument50 pagesMotores Fullingmotorservitecdj100% (1)
- 8051 Microcontroller Module 5 NotesDocument27 pages8051 Microcontroller Module 5 Notesrakesh rakiPas encore d'évaluation
- Ricoh mp161 D108 pс mp175 PDFDocument73 pagesRicoh mp161 D108 pс mp175 PDFЛеонид ПлютаPas encore d'évaluation
- Servo Stepper Driver UK 2 HSS86Document7 pagesServo Stepper Driver UK 2 HSS86Mimo AbduPas encore d'évaluation
- Controller FIS134 19-22 EN PDFDocument4 pagesController FIS134 19-22 EN PDFrimce77Pas encore d'évaluation
- Emergency Respiratory SystemDocument9 pagesEmergency Respiratory SystemIJRASETPublicationsPas encore d'évaluation
- 2.sensors & ActuatorsDocument30 pages2.sensors & Actuatorszakariyae el mourabit100% (1)
- Hypercube 3D Printer Using RatRig Frame KitDocument13 pagesHypercube 3D Printer Using RatRig Frame KitceovcdkqgdheqgauwaPas encore d'évaluation
- Epson Stylus Pro XL Service ManualDocument127 pagesEpson Stylus Pro XL Service ManualKST5Pas encore d'évaluation
- ModulesDocument52 pagesModulesJimmyRosePas encore d'évaluation
- 17HS4401 MotionKing PDFDocument1 page17HS4401 MotionKing PDFAlberto Aduvire RafaelPas encore d'évaluation
- Locktronics Technical Information PDFDocument39 pagesLocktronics Technical Information PDFAlex DatsiukPas encore d'évaluation
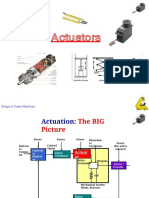
- ActuatorsDocument51 pagesActuatorsApdo MustafaPas encore d'évaluation
- AN032-Closed Loop Motor Control With TMC4361 For StepperDocument38 pagesAN032-Closed Loop Motor Control With TMC4361 For SteppergnugplPas encore d'évaluation
- DM556 ManualDocument4 pagesDM556 ManualSrdjan RadenovicPas encore d'évaluation