Vous aimerez peut-être aussi
- Tasc TodoDocument6 pagesTasc Todoleamena100% (2)
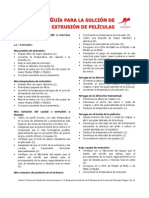
- Guia Solucion de Problemas en Extrusion PDFDocument11 pagesGuia Solucion de Problemas en Extrusion PDFmiguelavellaneda100% (2)
- Librocaligrafia56 150104225849 Conversion Gate01Document169 pagesLibrocaligrafia56 150104225849 Conversion Gate01Igor CostaPas encore d'évaluation
- Antecedentes Históricos de Metrologia1Document2 pagesAntecedentes Históricos de Metrologia1Bryan LukaaPas encore d'évaluation
- Administracion de ProduccionDocument3 pagesAdministracion de ProduccionBryan LukaaPas encore d'évaluation
- "Aluminio y Sus Aleaciones Determinación de La Dureza Brinell" nmx-w-014-1979Document9 pages"Aluminio y Sus Aleaciones Determinación de La Dureza Brinell" nmx-w-014-1979Bryan LukaaPas encore d'évaluation
- Leseprobe EsDocument11 pagesLeseprobe EsJuly MarzocchiniPas encore d'évaluation
- Breve Historia de La AnimacionDocument6 pagesBreve Historia de La AnimacionBryan LukaaPas encore d'évaluation
- Festo Fluidsim Pracneuma PDFDocument19 pagesFesto Fluidsim Pracneuma PDFFrancisco GMPas encore d'évaluation
- 1Document18 pages1bismarckandresPas encore d'évaluation
- Como Convertir de Indesign A PDFDocument2 pagesComo Convertir de Indesign A PDFTonyPas encore d'évaluation
- Aeronaves Que ExistenDocument3 pagesAeronaves Que ExistenMisael Santiago ValdiviesoPas encore d'évaluation
- Hirent Boot UsbDocument5 pagesHirent Boot UsbMarco Leandres AlmironPas encore d'évaluation
- Modelos determinísticos vs estocásticosDocument3 pagesModelos determinísticos vs estocásticosScarleth VillaverdePas encore d'évaluation
- 2016 Procesos Silabo MC 216Document5 pages2016 Procesos Silabo MC 216Larry BerriosPas encore d'évaluation
- Curso escoltas protección falenciasDocument2 pagesCurso escoltas protección falenciasJorge Luis Muñoz ZarazuaPas encore d'évaluation
- Certificado de conformidad de interruptores automáticos SiemensDocument2 pagesCertificado de conformidad de interruptores automáticos SiemensYessica Vasquez GarciaPas encore d'évaluation
- Formato de InformeDocument11 pagesFormato de InformeDaniela GallegosPas encore d'évaluation
- Mersa Manual Uso Fregadoras Comac Innova 65 75 85 100Document41 pagesMersa Manual Uso Fregadoras Comac Innova 65 75 85 100jeferson.silvaPas encore d'évaluation
- Manual de Operación y Mantenimiento de Aguas de InfiltracionDocument26 pagesManual de Operación y Mantenimiento de Aguas de InfiltracionMatias Garces MartinezPas encore d'évaluation
- Grupo 1 Incorporacion de PersonasDocument21 pagesGrupo 1 Incorporacion de PersonasJesus Abner Caballa ArangoPas encore d'évaluation
- Disparo DC Con SCRDocument4 pagesDisparo DC Con SCRLuigi875421100% (1)
- Instalaciones SanitariasDocument13 pagesInstalaciones SanitariasBryan Dávalos100% (1)
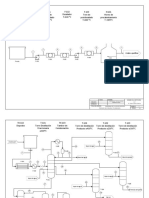
- Diagrama de Refinación de PetroleoDocument10 pagesDiagrama de Refinación de PetroleoAndreyPas encore d'évaluation
- Guia de Aprendizaje Semana 1 y 2Document5 pagesGuia de Aprendizaje Semana 1 y 2dauz20000% (2)
- Accionamiento Lab 2Document27 pagesAccionamiento Lab 2RenzoZaldivarCastañedaPas encore d'évaluation
- MCD_MCM_menosDocument3 pagesMCD_MCM_menosOMAR FELIPE HERRERA CÁCERESPas encore d'évaluation
- FullStop InstruccionesDocument6 pagesFullStop InstruccionesBlas Arias CaychoPas encore d'évaluation
- Apoyos VerbalesDocument1 pageApoyos Verbaleslmaf1912Pas encore d'évaluation
- Iluminacion BBDocument54 pagesIluminacion BBBryan Reyes BazalarPas encore d'évaluation
- Auditoría de redes del Instituto Tecnológico de ZacapoaxtlaDocument2 pagesAuditoría de redes del Instituto Tecnológico de ZacapoaxtlaLuisa E P. IslasPas encore d'évaluation
- EjerciciosDocument5 pagesEjerciciosAngelo VarelaPas encore d'évaluation
- Estudio Impacto Ambiental Proyecto La MoralejaDocument177 pagesEstudio Impacto Ambiental Proyecto La MoralejaJoffre Enrique Contento100% (1)
- Pasos Básicos para Crear Una Agencia de Carga en El PerúDocument4 pagesPasos Básicos para Crear Una Agencia de Carga en El PerúHerick OleaPas encore d'évaluation
- Fundamentos de Gestión CulturalDocument11 pagesFundamentos de Gestión CulturalNicolás F. Alpízar ValverdePas encore d'évaluation
- Molino San Javier, recurso histórico del Valle del BermejoDocument31 pagesMolino San Javier, recurso histórico del Valle del BermejoFranciscoPas encore d'évaluation
- Aplicación de La Taxonomia de BloomDocument4 pagesAplicación de La Taxonomia de BloomMiguel Barba Montes100% (1)