Vous aimerez peut-être aussi
- Literature Review For Research Problem StatementDocument18 pagesLiterature Review For Research Problem StatementPradeepChandraVarmaMandapati100% (1)
- BR1450758927GIAN Brochure Participation of Unity Methods Sundararajan Natarajan ME 12to18 December 2016Document2 pagesBR1450758927GIAN Brochure Participation of Unity Methods Sundararajan Natarajan ME 12to18 December 2016PradeepChandraVarmaMandapatiPas encore d'évaluation
- A New Torque Control Method For Torque Ripple Minimization of BLDC Motors With Un-Ideal Back EMFDocument9 pagesA New Torque Control Method For Torque Ripple Minimization of BLDC Motors With Un-Ideal Back EMFPradeepChandraVarmaMandapatiPas encore d'évaluation
- Half-Bridge Bidirectional DC-DC Converter For Small Electric VehicleDocument5 pagesHalf-Bridge Bidirectional DC-DC Converter For Small Electric VehiclePradeepChandraVarmaMandapati100% (1)
- 211EE3336Document86 pages211EE3336PradeepChandraVarmaMandapatiPas encore d'évaluation
- STAR DELTA Connection Diagram and Working PrincipleDocument2 pagesSTAR DELTA Connection Diagram and Working PrinciplePradeepChandraVarmaMandapatiPas encore d'évaluation
- R09-High Voltage Engineering & Insulation Co-OrdinationDocument1 pageR09-High Voltage Engineering & Insulation Co-OrdinationPradeepChandraVarmaMandapatiPas encore d'évaluation
- 5821nr-Flexible Ac Transmission SystemsDocument1 page5821nr-Flexible Ac Transmission SystemsPradeepChandraVarmaMandapatiPas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5795)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1091)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Ruckus Design Best Practices v2Document19 pagesRuckus Design Best Practices v2Gley RaveloPas encore d'évaluation
- Tutorial ATmega ScribDocument60 pagesTutorial ATmega ScribCarlosOlivierPas encore d'évaluation
- ModemDocument3 pagesModemshohobiPas encore d'évaluation
- By Dr. Layth Abdulkareem HassnawiDocument9 pagesBy Dr. Layth Abdulkareem Hassnawiجلال عواد كاظم جودةPas encore d'évaluation
- AFX Series Operation Manual-PN160620-10 v1.1.2 PDFDocument424 pagesAFX Series Operation Manual-PN160620-10 v1.1.2 PDFShandy CanesterPas encore d'évaluation
- NEXANS Energy Cable Catalogue PDFDocument1 pageNEXANS Energy Cable Catalogue PDFMeng Xiao ZhangPas encore d'évaluation
- Electrical and Electronics Engineer Job DescriptionDocument3 pagesElectrical and Electronics Engineer Job DescriptionsathyavlrPas encore d'évaluation
- AUTOSAR Layered ArchitectureDocument3 pagesAUTOSAR Layered ArchitectureAmalkumar V GPas encore d'évaluation
- Basic Concepts in ChemistryDocument103 pagesBasic Concepts in ChemistryVarshaPrajapati100% (1)
- Embraco CompressorDocument2 pagesEmbraco CompressorКръстю КръстевPas encore d'évaluation
- Proform 735CSDocument26 pagesProform 735CSjaf323Pas encore d'évaluation
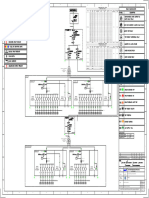
- Overall Ac SLD - SattaurDocument1 pageOverall Ac SLD - SattaurSumit TyagiPas encore d'évaluation
- Ultrasonic Machining (Usm)Document12 pagesUltrasonic Machining (Usm)RAMAKANT RANAPas encore d'évaluation
- EMT3-C10186 Manual (Rev. 1) W E-Stop and Throttle Pot (71610)Document17 pagesEMT3-C10186 Manual (Rev. 1) W E-Stop and Throttle Pot (71610)Matias Contreras Köbrich100% (2)
- A Dutch Journey in JLH-land: A Tribute To The JLH 10-15 Watt Class-A AmplifierDocument4 pagesA Dutch Journey in JLH-land: A Tribute To The JLH 10-15 Watt Class-A AmplifierDaniel ScardiniPas encore d'évaluation
- Códigos HammDocument20 pagesCódigos HammFelipeMercuri50% (14)
- Micro Controller Controlled Servo Motor With Keypad InputDocument3 pagesMicro Controller Controlled Servo Motor With Keypad InputUsman WaheedPas encore d'évaluation
- Errors 7800Document1 pageErrors 7800Глеб НутельсPas encore d'évaluation
- Isoiec14763-1 (Ed1 0) en PDFDocument24 pagesIsoiec14763-1 (Ed1 0) en PDFciscoboxPas encore d'évaluation
- Gray Hoverman The Wideband TV AntennaDocument5 pagesGray Hoverman The Wideband TV AntennaJames TanPas encore d'évaluation
- Project Report On Electronic Bikes e BikesDocument17 pagesProject Report On Electronic Bikes e BikesStephin Janvel100% (1)
- SJPO General Round 2009 With AnswersDocument21 pagesSJPO General Round 2009 With AnswersHaha XiPas encore d'évaluation
- Cast Resin Transformer RHS-R4 PDFDocument8 pagesCast Resin Transformer RHS-R4 PDFmecon bhilaiPas encore d'évaluation
- BestPracticesForCatSwitches PDFDocument65 pagesBestPracticesForCatSwitches PDFvsnarasimhanPas encore d'évaluation
- Literature ReviewDocument6 pagesLiterature ReviewtazebPas encore d'évaluation
- Hy Mini Stm32v ManualDocument3 pagesHy Mini Stm32v Manualronald david guerra alvarezPas encore d'évaluation
- Exc/Rtx18 Broadcast STL Vhf/Uhf/Shf 200 ÷ 960 & 1400 ÷ 2600 MHZDocument9 pagesExc/Rtx18 Broadcast STL Vhf/Uhf/Shf 200 ÷ 960 & 1400 ÷ 2600 MHZMebkh RabahPas encore d'évaluation
- Sharp Lc-60 Le 630 U-A - lc-60 Le 6300 U-A-b - lc-70 Le 735 U - PWB - Unit - EditionDocument38 pagesSharp Lc-60 Le 630 U-A - lc-60 Le 6300 U-A-b - lc-70 Le 735 U - PWB - Unit - EditionRabshaqa100% (1)
- Handbook of Hydrophone Element Design TechnologyDocument2 pagesHandbook of Hydrophone Element Design TechnologyBrendon SoongPas encore d'évaluation
- 2015 Macbook Air A1466 ALL - SYS - PWRGDDocument1 page2015 Macbook Air A1466 ALL - SYS - PWRGDVivek VarshneyPas encore d'évaluation