Vous aimerez peut-être aussi
- Protocolo de ComunicacionDocument167 pagesProtocolo de ComunicacionJohan Ortiz100% (1)
- Programación de Llaves y Computadora para FiatDocument110 pagesProgramación de Llaves y Computadora para FiatWilliam Hernandez GaliciaPas encore d'évaluation
- ST950 ELV General Handbook ESP PDFDocument98 pagesST950 ELV General Handbook ESP PDFEsbertoAlexanderPas encore d'évaluation
- Edc 15 C3Document6 pagesEdc 15 C3Jose VeraPas encore d'évaluation
- AirOS 5 Spanish - Ubiquiti WikiDocument37 pagesAirOS 5 Spanish - Ubiquiti WikicldiazpPas encore d'évaluation
- Frenado EmergenciaDocument32 pagesFrenado Emergencianantok100% (1)
- Equipos ColombiaDocument28 pagesEquipos ColombiaAndrés Felipe González Gómez100% (1)
- Que Son Las ECUSDocument4 pagesQue Son Las ECUSOscar SotoPas encore d'évaluation
- Sistemas Bosch EDC16: Características y principales mapasDocument38 pagesSistemas Bosch EDC16: Características y principales mapaspedro monteroPas encore d'évaluation
- Microcontroladores. Prof Danilo Rojas Chanto, Apoyo Examen FinalDocument45 pagesMicrocontroladores. Prof Danilo Rojas Chanto, Apoyo Examen FinalAssasingPas encore d'évaluation
- Validación Foro Mecánica AutomotrizDocument16 pagesValidación Foro Mecánica Automotrizfatimall100% (1)
- El Puerto BDMDocument3 pagesEl Puerto BDMAnyela Manzano100% (1)
- New Transdata Conexion E-GptDocument10 pagesNew Transdata Conexion E-GptFURIOSO CARS COMPUTERSPas encore d'évaluation
- Eobd Om EsDocument59 pagesEobd Om Esjuan herreraPas encore d'évaluation
- CatalogoDocument66 pagesCatalogoMario RamosPas encore d'évaluation
- AutoDATA 3.40Document2 pagesAutoDATA 3.40serlibresPas encore d'évaluation
- Technologia MULTIPLEXAJEDocument22 pagesTechnologia MULTIPLEXAJEDiego Vergara PinoPas encore d'évaluation
- Ax Master FullDocument2 pagesAx Master FullSebastiam GarayPas encore d'évaluation
- MEMORIADocument11 pagesMEMORIARvth JiménezhPas encore d'évaluation
- Curso de Reprogramacion de CentralitasDocument13 pagesCurso de Reprogramacion de CentralitasRomán Osvaldo Alemán GonzálezPas encore d'évaluation
- Packet RadioDocument17 pagesPacket RadioCarlos QuinodozPas encore d'évaluation
- Seminario Multiplexado 3Document46 pagesSeminario Multiplexado 3B Arturo GalindoPas encore d'évaluation
- Modulo 5 Tomo 4Document21 pagesModulo 5 Tomo 4pedro montero100% (1)
- Arcan Manual Software A5 v2Document12 pagesArcan Manual Software A5 v2Miguel Angel Corrales GomezPas encore d'évaluation
- Guía usuario tarjeta diagnóstico Post 4en1Document13 pagesGuía usuario tarjeta diagnóstico Post 4en1arturo0diaz_1Pas encore d'évaluation
- 4 Composición de Un DTC y Estrategia de DiagnosticoDocument3 pages4 Composición de Un DTC y Estrategia de DiagnosticoJuan Pablo Loayza100% (1)
- Exposicion MicrocontroladoresDocument45 pagesExposicion MicrocontroladoresAlberto DominguezPas encore d'évaluation
- Apuntes Cajasdecambiodevelocidadesautomotrices PDFDocument42 pagesApuntes Cajasdecambiodevelocidadesautomotrices PDFRamon pujolsPas encore d'évaluation
- Consulta - Transmisión RobotizadaDocument12 pagesConsulta - Transmisión RobotizadaANDRES GAGÑAYPas encore d'évaluation
- Actualiza mapas Suran 2015+ en VW AlemaniaDocument3 pagesActualiza mapas Suran 2015+ en VW AlemaniaPierDonneePas encore d'évaluation
- Como Usar Flash ToolDocument7 pagesComo Usar Flash ToolNavaCalvarioPas encore d'évaluation
- Es Ds100e Manual v7.0 SpanishDocument47 pagesEs Ds100e Manual v7.0 SpanishRaulPas encore d'évaluation
- Programas Maquinaria:: BDM 555pro Programadora UPA Ecm Titanium Volta MeucciDocument35 pagesProgramas Maquinaria:: BDM 555pro Programadora UPA Ecm Titanium Volta MeucciJuanCarlosCastilloPas encore d'évaluation
- Manual Sistema Refrigeracion Aire Agua Componentes Radiador Circuito Termostato Refrigerantes Funcionamiento Limpieza PDFDocument34 pagesManual Sistema Refrigeracion Aire Agua Componentes Radiador Circuito Termostato Refrigerantes Funcionamiento Limpieza PDFJorgePas encore d'évaluation
- Área PSA - Ver Tema - Codificacion de LlaveDocument2 pagesÁrea PSA - Ver Tema - Codificacion de LlaveRobsonCorrêaPas encore d'évaluation
- WEG CFW300 Manual de Programacion 10007849714 EsDocument176 pagesWEG CFW300 Manual de Programacion 10007849714 EsMauricio ElizarrarazPas encore d'évaluation
- c4 - 0510 06 173050a - Canalizacion Fijacion Filtro CombustibleDocument3 pagesc4 - 0510 06 173050a - Canalizacion Fijacion Filtro CombustibleFrancisco AlcaPas encore d'évaluation
- El Nuevo BMW X3Document28 pagesEl Nuevo BMW X3Sofia RincónPas encore d'évaluation
- Monitoreo de Datos Del AutomovilDocument123 pagesMonitoreo de Datos Del Automovilwilliam_senati20057051Pas encore d'évaluation
- 01 Inmovilizador Introduccio N PDFDocument7 pages01 Inmovilizador Introduccio N PDFFabiánAlanizPas encore d'évaluation
- Programador + MasterchipDocument58 pagesProgramador + Masterchipadrianramon100% (1)
- Presentacindelcursodecarrera2 221102045152 F5c7e9b5Document103 pagesPresentacindelcursodecarrera2 221102045152 F5c7e9b5Josè Zavala ArroyoPas encore d'évaluation
- Cómo configurar inyectores en HPCR DuratorqDocument2 pagesCómo configurar inyectores en HPCR DuratorqguillebohlPas encore d'évaluation
- Especificaciones Carprog V 7 28Document5 pagesEspecificaciones Carprog V 7 28Luis ArdilaPas encore d'évaluation
- 43708Document25 pages43708Patricio Andres Ibañez ConchaPas encore d'évaluation
- CTR 19 ManualDocument9 pagesCTR 19 Manualsergiosaavedraparra100% (1)
- Procedimiento para Ensamblar Un ComputadorDocument8 pagesProcedimiento para Ensamblar Un Computadorapi-264331320Pas encore d'évaluation
- Ecu Automotriz FuncionamientoDocument2 pagesEcu Automotriz FuncionamientoKaren DonosoPas encore d'évaluation
- Hermanación VW BORA ECU MED 9.1Document18 pagesHermanación VW BORA ECU MED 9.1luis niñoPas encore d'évaluation
- Manual-208-Esp Ed05 2017-Min 401413 PDFDocument416 pagesManual-208-Esp Ed05 2017-Min 401413 PDFdavid sanchez soraPas encore d'évaluation
- Discovery II 2004 Manual Del ConductorDocument4 pagesDiscovery II 2004 Manual Del ConductorJosé Alberto Gatgens CéspedesPas encore d'évaluation
- Reporte FinalDocument94 pagesReporte FinalAlexis Esteban Rodriguez SandovalPas encore d'évaluation
- 2017 Citroen c5 106989Document348 pages2017 Citroen c5 106989Jesús AranaPas encore d'évaluation
- Autodiagnostico de Varias MarcasDocument5 pagesAutodiagnostico de Varias Marcaswilliam_senati20057051Pas encore d'évaluation
- Aux in + Mando Volante Rd3Document4 pagesAux in + Mando Volante Rd3tgraudoPas encore d'évaluation
- Redes Pon - Jorge RiveraDocument17 pagesRedes Pon - Jorge Riverawassup2Pas encore d'évaluation
- Preparación y regulación de los sistemas de alimentación en máquinas de impresión offset. ARGI0109D'EverandPreparación y regulación de los sistemas de alimentación en máquinas de impresión offset. ARGI0109Pas encore d'évaluation
- Microcontroladores: arquitectura, recursos y aplicacionesDocument33 pagesMicrocontroladores: arquitectura, recursos y aplicacionesJairo GodoyPas encore d'évaluation
- ACT1-Micro KJLDocument8 pagesACT1-Micro KJLJoel Alberto Bacab CoronadoPas encore d'évaluation
- MicrocontroladoresDocument40 pagesMicrocontroladoresJosé Manuel100% (1)
- Manual General de Usuario Burny en Castellano by Walmar IngDocument101 pagesManual General de Usuario Burny en Castellano by Walmar IngKlaus Karner100% (3)
- Manual Operador Burny10Document42 pagesManual Operador Burny10Klaus Karner100% (2)
- Manual Operador Burny PhantomDocument42 pagesManual Operador Burny PhantomKlaus Karner75% (4)
- Drivers y Motores de ParkerDocument24 pagesDrivers y Motores de ParkerKlaus Karner100% (1)
- Ayuda Rapida CNC Burny y Sensor WalmarDocument3 pagesAyuda Rapida CNC Burny y Sensor WalmarKlaus KarnerPas encore d'évaluation
- Cuidado y Preserbacion de Los CuchillosDocument5 pagesCuidado y Preserbacion de Los CuchillosKlaus Karner100% (3)
- Incumbencias Profesionales para TécnicosDocument57 pagesIncumbencias Profesionales para TécnicosKlaus Karner100% (5)
- Proceso de Corte Por OxicorteDocument37 pagesProceso de Corte Por OxicorteKlaus Karner98% (40)
- Herramientas GcodeDocument6 pagesHerramientas GcodeKlaus KarnerPas encore d'évaluation
- Tabla de Picos OxicorteDocument2 pagesTabla de Picos OxicorteKlaus Karner86% (7)
- SigmaNest EspDocument24 pagesSigmaNest EspKlaus Karner100% (5)
- Control de Archivos Con VB6Document12 pagesControl de Archivos Con VB6Klaus Karner100% (31)
- Reproductor de Videos en JavaDocument7 pagesReproductor de Videos en JavaHerberthFigueroaPas encore d'évaluation
- InglesDocument10 pagesInglesjcondori tiwanakuPas encore d'évaluation
- Axel RodriguezDocument8 pagesAxel RodriguezAxel RodriguezPas encore d'évaluation
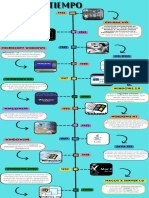
- Infografia Linea Del Tiempo Timeline Historia Cronologia Empresa Profesional MulticolorDocument2 pagesInfografia Linea Del Tiempo Timeline Historia Cronologia Empresa Profesional MulticolorAliison PerezPas encore d'évaluation
- Lab PCMDocument4 pagesLab PCMCristian Danny RamirezPas encore d'évaluation
- 4 DYSE LTSpice DigitalDocument49 pages4 DYSE LTSpice DigitalFernandoPas encore d'évaluation
- Circuito lógico de conversión de código Binario a GrayDocument3 pagesCircuito lógico de conversión de código Binario a GrayMiguel Angel Arroyave PiedrahitaPas encore d'évaluation
- Nivel 1, Leccion 2Document5 pagesNivel 1, Leccion 2jualdacam50% (6)
- Lista de Precios BG-1Document2 pagesLista de Precios BG-1Isac MartinezPas encore d'évaluation
- Programacion Curricular Metodologias de Desarrollo de SoftwareDocument5 pagesProgramacion Curricular Metodologias de Desarrollo de SoftwareJuan Carlos Hernandez SaonaPas encore d'évaluation
- 4.3.3.4 Lab - Configure HSRPDocument8 pages4.3.3.4 Lab - Configure HSRPJuan Carlos BolivarPas encore d'évaluation
- LUZ DE GIRO PARA BICICLETA: ENSAMBLAJE Y PRUEBA DE CIRCUITODocument8 pagesLUZ DE GIRO PARA BICICLETA: ENSAMBLAJE Y PRUEBA DE CIRCUITOXiomara Paredes CabaPas encore d'évaluation
- Manual2 1 Arduino 2014Document3 pagesManual2 1 Arduino 2014Victor PoquizPas encore d'évaluation
- Formato Informe GrupalDocument10 pagesFormato Informe GrupalEdinson Medina RiveraPas encore d'évaluation
- Arcode Quick Installation Guide.V210.es. - ShareDocument30 pagesArcode Quick Installation Guide.V210.es. - ShareRaul VillenaPas encore d'évaluation
- Tutorial Instalacion y Configuracion MongoBD (No SQL)Document18 pagesTutorial Instalacion y Configuracion MongoBD (No SQL)Darwin Granados GuillenPas encore d'évaluation
- Tabla Comparacion Comandos Sistemas OperativosDocument12 pagesTabla Comparacion Comandos Sistemas Operativosaltagracia0% (1)
- GersoDocument11 pagesGersoramiro1ecvictorlevanPas encore d'évaluation
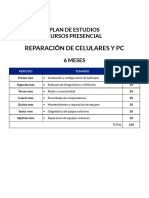
- Reparación de Celulares y PCDocument5 pagesReparación de Celulares y PCAlessandro RafaelPas encore d'évaluation
- Cabrera - Comandos.Document6 pagesCabrera - Comandos.Alexander CabreraPas encore d'évaluation
- SpiceworksDocument3 pagesSpiceworksMiguel MejiaPas encore d'évaluation
- Arquitectura de RedesDocument60 pagesArquitectura de Redesvincen16.vaPas encore d'évaluation
- Manejo de Swing en JAVA para NetbeansDocument24 pagesManejo de Swing en JAVA para NetbeanselamigojohnPas encore d'évaluation
- Ids Vs IpsDocument18 pagesIds Vs IpsMarcelo RzPas encore d'évaluation
- PG-655-Mejia Flores, Heriberto JulioDocument189 pagesPG-655-Mejia Flores, Heriberto JulioDavid C. AlvesteguiPas encore d'évaluation
- Diseño OO con UMLDocument24 pagesDiseño OO con UMLJuan Carlos García OrozcoPas encore d'évaluation
- Conseptos BasicosDocument6 pagesConseptos BasicosMaria Eugenia HernandezPas encore d'évaluation
- Trabajo de AlgoritmicaDocument22 pagesTrabajo de AlgoritmicasssuiquioPas encore d'évaluation
- Actividad 2 PropuestaDocument11 pagesActividad 2 PropuestaJOSE LEONARDO CASTAÑEDA PINTOPas encore d'évaluation
- Configuración básica de proxy transparente con SquidDocument9 pagesConfiguración básica de proxy transparente con SquidJëändrÿKâl-ElPas encore d'évaluation