Vous aimerez peut-être aussi
- Programacion 2012 IDocument3 pagesProgramacion 2012 IErick Sandro Maguiña SanchezPas encore d'évaluation
- Plan Labs 2012-IDocument3 pagesPlan Labs 2012-IErick Sandro Maguiña SanchezPas encore d'évaluation
- CireleccDocument42 pagesCireleccErick Sandro Maguiña SanchezPas encore d'évaluation
- Robotica2 PDFDocument4 pagesRobotica2 PDFErick Sandro Maguiña SanchezPas encore d'évaluation
- Control Pid Temp Snsor Lm35 Explic CompletaDocument10 pagesControl Pid Temp Snsor Lm35 Explic CompletaOscar Fernando Giraldo GiraldoPas encore d'évaluation
- CireleccDocument49 pagesCireleccFranz Montero RamirezPas encore d'évaluation
- Troubleshooting Ender3 LukeHatfieldDocument81 pagesTroubleshooting Ender3 LukeHatfieldErick Sandro Maguiña SanchezPas encore d'évaluation
- T Espe 049160Document227 pagesT Espe 049160Erick Sandro Maguiña Sanchez0% (1)
- fx-9860GII SD fx-9860GII fx-9860G AU PLUS fx-9860G SD fx-9860G fx-9860G AU fx-9750G fx-7400G Software Versión 2.0Document411 pagesfx-9860GII SD fx-9860GII fx-9860G AU PLUS fx-9860G SD fx-9860G fx-9860G AU fx-9750G fx-7400G Software Versión 2.0Erick Sandro Maguiña SanchezPas encore d'évaluation
- CD 6348 PDFDocument268 pagesCD 6348 PDFErick Sandro Maguiña SanchezPas encore d'évaluation
- Cálculo Multivariado y Ecuaciones DiferencialesDocument116 pagesCálculo Multivariado y Ecuaciones DiferencialesFranciscoLunaPas encore d'évaluation
- Obl Introducción SDHDocument45 pagesObl Introducción SDHIvan NúñezPas encore d'évaluation
- Seguridad Informatica PDFDocument196 pagesSeguridad Informatica PDFAJ SotoPas encore d'évaluation
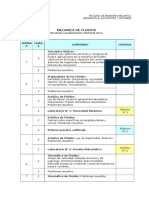
- 7 Fluidos Utp 2012Document9 pages7 Fluidos Utp 2012Erick Sandro Maguiña SanchezPas encore d'évaluation
- EXPOMATE2Document13 pagesEXPOMATE2Erick Sandro Maguiña SanchezPas encore d'évaluation
- Maximos y MinimosDocument15 pagesMaximos y Minimospalacios1993100% (1)
- ExpomateV 1 (Final CorregidoDocument12 pagesExpomateV 1 (Final CorregidoErick Sandro Maguiña SanchezPas encore d'évaluation
- Transformada FourierDocument81 pagesTransformada FourierFrancisco FloresPas encore d'évaluation
- Valores ExtremosDocument8 pagesValores Extremoskigada2Pas encore d'évaluation
- Catalogo DrTool Herramientas de DeiagnosticoDocument24 pagesCatalogo DrTool Herramientas de Deiagnosticocarlos malvaciaPas encore d'évaluation
- Camara Foscam FI8918Document33 pagesCamara Foscam FI8918Pablo Piriwenho GodoyPas encore d'évaluation
- CireleccDocument49 pagesCireleccFranz Montero RamirezPas encore d'évaluation
- PicRS232 VCPP y VBDocument201 pagesPicRS232 VCPP y VBJose Alberto DrgPas encore d'évaluation
- Integrales Dobles Utp2010Document2 pagesIntegrales Dobles Utp2010Luis Ibañez SegoviaPas encore d'évaluation
- Sistemas de Reproducción de SonidoDocument14 pagesSistemas de Reproducción de SonidoErick Sandro Maguiña SanchezPas encore d'évaluation
- Velocidad Del SonidoDocument12 pagesVelocidad Del SonidoKevin MayorgaPas encore d'évaluation
- Ccna 4.0 Exploration 1 Esp PDFDocument426 pagesCcna 4.0 Exploration 1 Esp PDFjohnatan21Pas encore d'évaluation
- Moduladores Sigma DeltaDocument11 pagesModuladores Sigma DeltaRecuerdos En Blanco OotPas encore d'évaluation
- Variable Compleja - Hauser (Creo)Document87 pagesVariable Compleja - Hauser (Creo)EternaOzkuridaPas encore d'évaluation
- Ciamte 2013 IsbnDocument946 pagesCiamte 2013 IsbnMKMPOS100% (2)
- Paradigmas e investigaciónDocument21 pagesParadigmas e investigaciónMiguel LeónPas encore d'évaluation
- BALOTARIO Realidad Nacional PDFDocument4 pagesBALOTARIO Realidad Nacional PDFreginaPas encore d'évaluation
- 1 Taller Física Fundamental 2 PDFDocument2 pages1 Taller Física Fundamental 2 PDFJhon CabreraPas encore d'évaluation
- Vocabulario ContextualDocument49 pagesVocabulario ContextualYoan Ortega Chiguay0% (1)
- El Normativismo y El PoderDocument4 pagesEl Normativismo y El PoderFeña TapiaPas encore d'évaluation
- Docit - Tips - El Cuerpo Habla Joe Navarro PDF Gigabitespdf PDFDocument2 pagesDocit - Tips - El Cuerpo Habla Joe Navarro PDF Gigabitespdf PDFAntonellaBebyKlicaPas encore d'évaluation
- Sentipensar El Pluriverso - Fals BordaDocument12 pagesSentipensar El Pluriverso - Fals BordaPedro Antonio Jilberto VergaraPas encore d'évaluation
- Redemptor HominisDocument46 pagesRedemptor HominisOrnamentos SagradosPas encore d'évaluation
- DocDocument25 pagesDocAle PadPas encore d'évaluation
- El Teólogo John Courtney MurrayDocument46 pagesEl Teólogo John Courtney MurrayArturo RiosPas encore d'évaluation
- Ficha de Reflexión Sobre La Actuación Docente 2 Casos1Document4 pagesFicha de Reflexión Sobre La Actuación Docente 2 Casos1Armando Marcos100% (2)
- Crítica de La MoralDocument2 pagesCrítica de La MoralAbel Rodríguez Cardos0% (1)
- El Amor Desconfiado 4Document7 pagesEl Amor Desconfiado 4John Jairo CórdobaPas encore d'évaluation
- Sanidad Interior de La ParejaDocument34 pagesSanidad Interior de La ParejaEduix Rojas100% (1)
- Preguntas GeohidrológicaDocument3 pagesPreguntas GeohidrológicaMaricarmen Reyes SantianaPas encore d'évaluation
- Definición de Fórmulas EstadísticasDocument11 pagesDefinición de Fórmulas EstadísticasMichelle Mancero Valencia100% (1)
- El Saco de MarxDocument1 pageEl Saco de MarxErnesto AnaguanoPas encore d'évaluation
- Teea 2013-2014Document48 pagesTeea 2013-2014Vicente Casas AltamiranoPas encore d'évaluation
- Sociologia Capitulo 3Document10 pagesSociologia Capitulo 3Alfredo Perez100% (1)
- Resumen Capítulo 8 - Administración de Recursos HumanosDocument4 pagesResumen Capítulo 8 - Administración de Recursos HumanosIsidora Flores Yañez71% (7)
- Voz La Importancia de La Voz en La ComunicaciónDocument2 pagesVoz La Importancia de La Voz en La ComunicaciónBruno Javier Cuadros PalominoPas encore d'évaluation
- Apostoles Del Sagrado Corazon A Edicion PDFDocument94 pagesApostoles Del Sagrado Corazon A Edicion PDFAnonymous lg8UvHK100% (3)
- Mitos ancestrales de los PastosDocument26 pagesMitos ancestrales de los PastosEULER EMILIO MIMALCHI TAPIEPas encore d'évaluation
- Tendencias PedagógicasDocument10 pagesTendencias Pedagógicasingris Vásquez FalónPas encore d'évaluation
- SimbologiaDocument6 pagesSimbologiaSandberg RubénPas encore d'évaluation
- RevolucionfrancesaDocument25 pagesRevolucionfrancesailuminada66Pas encore d'évaluation
- Unidad II Principios Lógicos JurídicosDocument32 pagesUnidad II Principios Lógicos JurídicosRoxana PerezPas encore d'évaluation
- Ce Duc 116647Document151 pagesCe Duc 116647Biblioteca Digital UANPas encore d'évaluation
- AtlántidaDocument14 pagesAtlántidafrednielsPas encore d'évaluation