Vous aimerez peut-être aussi
- Ultrasonic sensor spectacles guide blind peopleDocument19 pagesUltrasonic sensor spectacles guide blind peopleparitosh kushwahaPas encore d'évaluation
- Voice Based Navigation System For Blind People Using Ultrasonic SensorDocument6 pagesVoice Based Navigation System For Blind People Using Ultrasonic SensorEditor IJRITCCPas encore d'évaluation
- Smart Stick For Blind PeopleDocument9 pagesSmart Stick For Blind People19R21A04M7 MOTHE DEEPAKPas encore d'évaluation
- Smart Walking Stick For Blind PeopleDocument14 pagesSmart Walking Stick For Blind PeopleTIMON KIPRONOPas encore d'évaluation
- Location Finding For Blind People Using Smart Navigation StickDocument28 pagesLocation Finding For Blind People Using Smart Navigation Stickvishalmate10Pas encore d'évaluation
- Smart Stick For Blind Using Raspberry Pi: Akhila. S Disha M RaniDocument3 pagesSmart Stick For Blind Using Raspberry Pi: Akhila. S Disha M RaniAbdo ZezoPas encore d'évaluation
- Smart Android Application For Blind People Based On Object DetectionDocument2 pagesSmart Android Application For Blind People Based On Object DetectionEditor IJRITCCPas encore d'évaluation
- Multi-Functional Blind Stick For Visually Impaired PeopleDocument5 pagesMulti-Functional Blind Stick For Visually Impaired PeopleRaghu BPas encore d'évaluation
- Advanced Electronic Walking Stick For BlindDocument5 pagesAdvanced Electronic Walking Stick For BlindGRD JournalsPas encore d'évaluation
- EMMI - CH 6 - 13092018 - 031526AMDocument9 pagesEMMI - CH 6 - 13092018 - 031526AMRemix CornerPas encore d'évaluation
- Biotelemetry 3.1 Introduction To BiotelemetryDocument11 pagesBiotelemetry 3.1 Introduction To Biotelemetrysriram128100% (1)
- Power Theft by IOTT 1Document11 pagesPower Theft by IOTT 1Manoj KolliparaPas encore d'évaluation
- Project PPT 1Document11 pagesProject PPT 1Mahesh ShendePas encore d'évaluation
- RMK College Biomedical Instrumentation Online TestDocument2 pagesRMK College Biomedical Instrumentation Online TestsankarsadaPas encore d'évaluation
- Foot Step Based Power GeneratorDocument15 pagesFoot Step Based Power Generatorchanda SindhuraPas encore d'évaluation
- Obstacle Detection and Navigation System For Visually Impaired Using Smart ShoesDocument4 pagesObstacle Detection and Navigation System For Visually Impaired Using Smart ShoesAnonymous CUPykm6DZPas encore d'évaluation
- Microcontroller Based Radar SystemDocument19 pagesMicrocontroller Based Radar SystemMeet MakwanaPas encore d'évaluation
- Radio PillDocument4 pagesRadio PillsaranyaammuPas encore d'évaluation
- Arduino Based Radar SystemDocument22 pagesArduino Based Radar SystemMayank MrinalPas encore d'évaluation
- Protection of Transmission Lines Using Gps Full ReportDocument28 pagesProtection of Transmission Lines Using Gps Full ReportRamya GajjarapuPas encore d'évaluation
- Chapter 3 Part 1 Sensor and TransducersDocument48 pagesChapter 3 Part 1 Sensor and TransducersFikadu Eshetu100% (1)
- Health Monitoring GloveDocument7 pagesHealth Monitoring GloveYashPas encore d'évaluation
- BMI NotesDocument89 pagesBMI Notesamrit3230% (1)
- Fiber Optical Communications OverviewDocument179 pagesFiber Optical Communications Overviewanil kumarPas encore d'évaluation
- A Project Report ON Ecg Signal Denoisig Using Wavelet TransformDocument58 pagesA Project Report ON Ecg Signal Denoisig Using Wavelet Transformnaali pavanPas encore d'évaluation
- Module5 6 Imp QuestionsDocument8 pagesModule5 6 Imp Questionsnikita SinghPas encore d'évaluation
- Ultrasonic Navigation System For The BlindDocument41 pagesUltrasonic Navigation System For The BlindGagandeep SinghPas encore d'évaluation
- Electro Cardiograph y Circuit DesignDocument10 pagesElectro Cardiograph y Circuit DesignSaad Al HelyPas encore d'évaluation
- Dte 1 QP PDFDocument2 pagesDte 1 QP PDFBHARATHI .APas encore d'évaluation
- Eem ProjectDocument12 pagesEem Projectkshitish mohapatraPas encore d'évaluation
- BioMEMS Advantages and Applications in Clinical Diagnostics, Environmental SensingDocument14 pagesBioMEMS Advantages and Applications in Clinical Diagnostics, Environmental SensingMojo JojoPas encore d'évaluation
- Digital Clock Using 8051 Microcontroller With RTCDocument47 pagesDigital Clock Using 8051 Microcontroller With RTCsiddharthPas encore d'évaluation
- Recording ProblemsDocument13 pagesRecording ProblemsAleesha100% (1)
- Report FYP FinalDocument71 pagesReport FYP FinalAnonymous vM2kH3KYcPas encore d'évaluation
- Heart Rate and Pulse Waveform MonitorDocument33 pagesHeart Rate and Pulse Waveform MonitorPraveen dewalPas encore d'évaluation
- Biomedical Instrumentation Syllabus 2017 RegulationDocument1 pageBiomedical Instrumentation Syllabus 2017 RegulationGiriprasath.DPas encore d'évaluation
- PPG Sensor SystemDocument22 pagesPPG Sensor Systemmanishanand555Pas encore d'évaluation
- History of MicroelectronicsDocument60 pagesHistory of MicroelectronicsJenelyn Alday100% (2)
- Raspberry Pi Based Tele-ECG Monitoring SystemDocument37 pagesRaspberry Pi Based Tele-ECG Monitoring Systemdhiwahar cv100% (1)
- Question Bank EE372 BMEDocument3 pagesQuestion Bank EE372 BMEabhilashkrishnantkPas encore d'évaluation
- MEMS Sensors Design and ApplicationsDocument14 pagesMEMS Sensors Design and ApplicationsDivyavarshiniPas encore d'évaluation
- On RecordersDocument54 pagesOn RecordersRudra Kumar Mishra100% (1)
- Robotic Platform For Monitoring Underground Cable SystemsDocument5 pagesRobotic Platform For Monitoring Underground Cable SystemsAcap klPas encore d'évaluation
- Optical Fiber Transmission Link ElementsDocument15 pagesOptical Fiber Transmission Link ElementsAchu0% (1)
- Power Electronics-MinDocument73 pagesPower Electronics-MinIjaz AhmadPas encore d'évaluation
- Biomedical Instrumentation I: DR Muhammad Arif, PHDDocument43 pagesBiomedical Instrumentation I: DR Muhammad Arif, PHDDivya AseejaPas encore d'évaluation
- Theory and Applications of Bio TelemetryDocument20 pagesTheory and Applications of Bio TelemetryHusseinKhalid100% (1)
- Recognition of Telugu Characters Using Dynamic Hand GesturesDocument23 pagesRecognition of Telugu Characters Using Dynamic Hand GesturesLalitha YentiPas encore d'évaluation
- Automatic Ration Distribution by Using Raspberry PiDocument5 pagesAutomatic Ration Distribution by Using Raspberry PiIJIRSTPas encore d'évaluation
- Power ElectronicsDocument29 pagesPower Electronicsgrbavithra100% (1)
- AI-Based Navigator For Hassle-Free Navigation For Visually ImpairedDocument6 pagesAI-Based Navigator For Hassle-Free Navigation For Visually Impairednihal bhandaryPas encore d'évaluation
- Project ListDocument20 pagesProject ListAniket ChavanPas encore d'évaluation
- Mutsvangwa ProjectDocument9 pagesMutsvangwa ProjectmorelaPas encore d'évaluation
- Laser Security System: A Mini Project ONDocument11 pagesLaser Security System: A Mini Project ONRama KrishnaPas encore d'évaluation
- Calibration OscilloscopeDocument4 pagesCalibration Oscilloscopeone0125455729Pas encore d'évaluation
- Auto-Smart Obstacle DetectionDocument5 pagesAuto-Smart Obstacle DetectionIJSTEPas encore d'évaluation
- Design For Visually Impaired To Work at Industry Using RFID TechnologyDocument5 pagesDesign For Visually Impaired To Work at Industry Using RFID Technologyilg1Pas encore d'évaluation
- Stick Blind ManDocument4 pagesStick Blind ManجعفرالشموسيPas encore d'évaluation
- Smart Cap Research PaperDocument9 pagesSmart Cap Research PaperPPLM MuntilanPas encore d'évaluation
- Chap 24Document17 pagesChap 24jitu_4Pas encore d'évaluation
- Lec14 DSPDocument6 pagesLec14 DSPجعفرالشموسيPas encore d'évaluation
- Lec14 DSPDocument6 pagesLec14 DSPجعفرالشموسيPas encore d'évaluation
- Amplification: Storey: Electrical & Electronic Systems © Pearson Education Limited 2004Document31 pagesAmplification: Storey: Electrical & Electronic Systems © Pearson Education Limited 2004جعفرالشموسيPas encore d'évaluation
- Chap 19Document31 pagesChap 19agha zahidPas encore d'évaluation
- Inductance and Magnetic Fields: Storey: Electrical & Electronic Systems © Pearson Education Limited 2004Document30 pagesInductance and Magnetic Fields: Storey: Electrical & Electronic Systems © Pearson Education Limited 2004PRDEEPPas encore d'évaluation
- Chapter 7Document29 pagesChapter 7Franz SantosPas encore d'évaluation
- Chap27-Implementing Digital SystemsDocument18 pagesChap27-Implementing Digital SystemsجعفرالشموسيPas encore d'évaluation
- Chap26-Data Acquisition and ConversionDocument20 pagesChap26-Data Acquisition and ConversionجعفرالشموسيPas encore d'évaluation
- Applications of Neural NetworksDocument5 pagesApplications of Neural NetworksجعفرالشموسيPas encore d'évaluation
- Chap04 ActuatorsDocument16 pagesChap04 ActuatorsجعفرالشموسيPas encore d'évaluation
- FLIPFLOPSDocument31 pagesFLIPFLOPSShahazad ArifPas encore d'évaluation
- Amplification: Storey: Electrical & Electronic Systems © Pearson Education Limited 2004Document31 pagesAmplification: Storey: Electrical & Electronic Systems © Pearson Education Limited 2004جعفرالشموسيPas encore d'évaluation
- Chap04 ActuatorsDocument16 pagesChap04 ActuatorsجعفرالشموسيPas encore d'évaluation
- Chap 02 Basic Concepts of CircuitDocument23 pagesChap 02 Basic Concepts of Circuitמוחמד טאהאPas encore d'évaluation
- Chap05-Signals and Data TransmissionDocument25 pagesChap05-Signals and Data TransmissionجعفرالشموسيPas encore d'évaluation
- Chap 03Document25 pagesChap 03pani256Pas encore d'évaluation
- Introduction To PID ControlDocument8 pagesIntroduction To PID ControlNooruddin SheikPas encore d'évaluation
- Paper DesignandSimulationofAutomatic 1065 PDFDocument9 pagesPaper DesignandSimulationofAutomatic 1065 PDFجعفرالشموسيPas encore d'évaluation
- Particle Swarm Optimization for Solving the Multi-Objective Bin Packing ProblemDocument42 pagesParticle Swarm Optimization for Solving the Multi-Objective Bin Packing ProblemSreerag Kunnathu SugathanPas encore d'évaluation
- Chap05-Signals and Data TransmissionDocument25 pagesChap05-Signals and Data TransmissionجعفرالشموسيPas encore d'évaluation
- Smart Home Energy Management System Monitoring and Control of Appliances Using An Arduino Based Network in The Context of A Micro GridDocument69 pagesSmart Home Energy Management System Monitoring and Control of Appliances Using An Arduino Based Network in The Context of A Micro GridJagabandhu Kar0% (1)
- Real Time SchedulingDocument20 pagesReal Time SchedulingBrajMohanPrasadSinhaPas encore d'évaluation
- Introduction To Cdma: Code Division Multiple Access (CDMA) Is A Radically New Concept in WirelessDocument24 pagesIntroduction To Cdma: Code Division Multiple Access (CDMA) Is A Radically New Concept in WirelessMohamed Abdel MonemPas encore d'évaluation
- PsoDocument4 pagesPsoجعفرالشموسيPas encore d'évaluation
- PsoDocument4 pagesPsoجعفرالشموسيPas encore d'évaluation
- 5 Design and Implementation of Test of Audiometric Based On MicrocontrollerDocument12 pages5 Design and Implementation of Test of Audiometric Based On MicrocontrollerجعفرالشموسيPas encore d'évaluation
- 5 Design and Implementation of Test of Audiometric Based On MicrocontrollerDocument12 pages5 Design and Implementation of Test of Audiometric Based On MicrocontrollerجعفرالشموسيPas encore d'évaluation
- Design and Construction of Digital Multi Meter Using Pic Microcontroller PDFDocument6 pagesDesign and Construction of Digital Multi Meter Using Pic Microcontroller PDFجعفرالشموسيPas encore d'évaluation
- Isc 2SD998: Silicon NPN Power TransistorDocument2 pagesIsc 2SD998: Silicon NPN Power TransistorDjoPas encore d'évaluation
- Rugged Multi-Axis Joystick Controls Heavy EquipmentDocument11 pagesRugged Multi-Axis Joystick Controls Heavy Equipmentdjoko123Pas encore d'évaluation
- GTP For 250kva Star-2Document6 pagesGTP For 250kva Star-2Geetha BPas encore d'évaluation
- DMR 800 Installation and Hardware Guide2Document4 pagesDMR 800 Installation and Hardware Guide2Nishant PandyaPas encore d'évaluation
- BBD Bucket StandfordDocument33 pagesBBD Bucket StandfordKotorrPas encore d'évaluation
- Experiment Title: Measurement of Temperature Using Different Thermal Sensors/transducersDocument14 pagesExperiment Title: Measurement of Temperature Using Different Thermal Sensors/transducersZobaeir Akanda RatulPas encore d'évaluation
- Transformer Technical Data Sheet For The 1LAP016379Document1 pageTransformer Technical Data Sheet For The 1LAP016379alllim88Pas encore d'évaluation
- 615 Series General Presentation - 756700 - ENgDocument75 pages615 Series General Presentation - 756700 - ENgmarcondesmague1Pas encore d'évaluation
- Features: Slls115E - October 1980 - Revised October 2007Document27 pagesFeatures: Slls115E - October 1980 - Revised October 2007Iván GissiPas encore d'évaluation
- Homework 1Document3 pagesHomework 1Shaban Malik100% (1)
- Neta Study Guide 2017rDocument122 pagesNeta Study Guide 2017rJAVIER BETANCOURTPas encore d'évaluation
- Starting Guide Frenic MegaDocument41 pagesStarting Guide Frenic MegaMuhammad Jazztyan Indra PradanaPas encore d'évaluation
- 2007 Saturn AURA Green Line Hybrid & 2008 Chevrolet Malibu HybridDocument26 pages2007 Saturn AURA Green Line Hybrid & 2008 Chevrolet Malibu Hybridlartsim115Pas encore d'évaluation
- O & M Manual For The ATC-800, 3 Position Contactor Based Transfer SwitchDocument44 pagesO & M Manual For The ATC-800, 3 Position Contactor Based Transfer SwitchmrtabiehjPas encore d'évaluation
- Design Calculation of A Solar Power System For PTP Microwave Link SubscriberDocument11 pagesDesign Calculation of A Solar Power System For PTP Microwave Link Subscriberشـخـ صـﮱ اسـطورﮱPas encore d'évaluation
- 1LUB000001-BLE InstallationManual Dry 201402Document24 pages1LUB000001-BLE InstallationManual Dry 201402Anonymous mcCJYBoPas encore d'évaluation
- R41B Series DSDocument21 pagesR41B Series DSEnrique Sanchez (KicKeWoW)Pas encore d'évaluation
- Fundamentals of Electromagnetic Wave PropagationDocument26 pagesFundamentals of Electromagnetic Wave PropagationUMEESSPas encore d'évaluation
- Worksheet On Magnetic Field Mapping RevisedDocument1 pageWorksheet On Magnetic Field Mapping RevisedglzrioPas encore d'évaluation
- Industrial ElectronicsDocument324 pagesIndustrial Electronicsshambhu32100% (1)
- HOUDEC Type Mr783 Technical Data SheetDocument8 pagesHOUDEC Type Mr783 Technical Data Sheetmahmoud fawzyPas encore d'évaluation
- 901-0602 Onan 12 & 24 Volt Battery Charger 305-0812 305-0813 Installation & Service Manual (05-2001)Document16 pages901-0602 Onan 12 & 24 Volt Battery Charger 305-0812 305-0813 Installation & Service Manual (05-2001)เกียรติศักดิ์ ภูมิลา100% (2)
- Permanent Magnet DC Motor With Planetary Gearhead PerformaxDocument5 pagesPermanent Magnet DC Motor With Planetary Gearhead PerformaxMario Arturo RendonPas encore d'évaluation
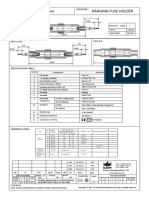
- Hanging fuse holder product detailsDocument1 pageHanging fuse holder product detailsbemlPas encore d'évaluation
- Passive and Active Battery Balancing Comparison Based On MATLAB SimulationDocument7 pagesPassive and Active Battery Balancing Comparison Based On MATLAB SimulationNhật NguyễnPas encore d'évaluation
- Magnetic Effects of Electric CurrentDocument3 pagesMagnetic Effects of Electric Currentsonali soumyashreePas encore d'évaluation
- C1000D5 4 PDFDocument4 pagesC1000D5 4 PDFjavier.oyarzo.pPas encore d'évaluation
- Votage Regulation of 33KV LineDocument4 pagesVotage Regulation of 33KV LinermrcelljsebPas encore d'évaluation
- Pro Slate 12 DisassemblyDocument7 pagesPro Slate 12 DisassemblyDan GriffithsPas encore d'évaluation
- AC Coupon PCPDocument1 pageAC Coupon PCPsoltani aliPas encore d'évaluation