Vous aimerez peut-être aussi
- Ejercicios 6 Diagrama Bloques FlujogramasDocument28 pagesEjercicios 6 Diagrama Bloques FlujogramasPopocatl FloresPas encore d'évaluation
- Hoja de Problemas #2 Andia PDFDocument6 pagesHoja de Problemas #2 Andia PDFPaola Sanchez ContrerasPas encore d'évaluation
- Taller de Estudio 1Document8 pagesTaller de Estudio 1juan pablo sandoval mejiaPas encore d'évaluation
- Taller de Control AutomaticoDocument2 pagesTaller de Control Automaticojcarlosherrerac7Pas encore d'évaluation
- Trabajo de Investigacion Modelado de Motor DCDocument8 pagesTrabajo de Investigacion Modelado de Motor DCferminPas encore d'évaluation
- Hoja de Problemas #3 MecánicaDocument5 pagesHoja de Problemas #3 MecánicaFidel Andía GuzmánPas encore d'évaluation
- Sec - Ea-T3-C - Adicionales - Completos - t3 - 0910a-5211 Resueltos de Sistemas de ControlDocument28 pagesSec - Ea-T3-C - Adicionales - Completos - t3 - 0910a-5211 Resueltos de Sistemas de ControlFabian OrtuzarPas encore d'évaluation
- Exámenes AutomáticaDocument199 pagesExámenes AutomáticareturboPas encore d'évaluation
- Hoja de Problemas #3 Electrónica PDFDocument6 pagesHoja de Problemas #3 Electrónica PDFFidel Andía GuzmánPas encore d'évaluation
- Lgebra de Diagrama de BloquesDocument42 pagesLgebra de Diagrama de BloquesHarold RodriguezPas encore d'évaluation
- Cap002 Modelos Matematicos de Sistemas DinámicosDocument46 pagesCap002 Modelos Matematicos de Sistemas Dinámicosivanaru404Pas encore d'évaluation
- Deber 4 Sistemas de Control 1T2023Document9 pagesDeber 4 Sistemas de Control 1T2023javier montillaPas encore d'évaluation
- Clase 04 Funcion de Transferencia Sistemas Electricos Mecanicos Rotacionales PDFDocument23 pagesClase 04 Funcion de Transferencia Sistemas Electricos Mecanicos Rotacionales PDFmiscaelPas encore d'évaluation
- Clase 04 Funcion de Transferencia Sistemas Electricos Mecanicos Rotacionales PDFDocument23 pagesClase 04 Funcion de Transferencia Sistemas Electricos Mecanicos Rotacionales PDFmiscael100% (1)
- Modelado de Sistemas ElectromecánicosMEJORADODocument5 pagesModelado de Sistemas ElectromecánicosMEJORADODiana SanchezPas encore d'évaluation
- Clase 06 Diagrama de Bloques y Espacio de EstadosDocument37 pagesClase 06 Diagrama de Bloques y Espacio de EstadosHevert Vargas VargasPas encore d'évaluation
- Informe 3Document20 pagesInforme 3hectorPas encore d'évaluation
- Diagramas de Boloques y de Flujo de SeñalDocument19 pagesDiagramas de Boloques y de Flujo de SeñalFernando Cuervo CuellarPas encore d'évaluation
- Cuadernillo I Control IDocument9 pagesCuadernillo I Control ITony Martinez100% (1)
- Tarea Nº5 Sistemas Lineales Dinámicos PDFDocument22 pagesTarea Nº5 Sistemas Lineales Dinámicos PDFCamilo Ignacio Arriagada Jara100% (1)
- Sem2008-1 ELT2642 PDFDocument53 pagesSem2008-1 ELT2642 PDFNataniel FloresPas encore d'évaluation
- GuiaTP 2019 Rev1.01 PDFDocument50 pagesGuiaTP 2019 Rev1.01 PDFOidualc AñucaPas encore d'évaluation
- Práctica de Sistemas de ControlDocument6 pagesPráctica de Sistemas de ControlAlejandro Quinteros CabreraPas encore d'évaluation
- Examen 2-2208 ELT-2510Document61 pagesExamen 2-2208 ELT-2510Wilson Albert Ramos GuerrerosPas encore d'évaluation
- Examen Preguntas Temas 1y2 Automatica Marzo2020 PDFDocument3 pagesExamen Preguntas Temas 1y2 Automatica Marzo2020 PDFJaime Fernandez CaballeroPas encore d'évaluation
- Solucionario de Sistemas de Control IDocument41 pagesSolucionario de Sistemas de Control IRaul Roque Yujra0% (1)
- Practica 3. Espacio de EstadoDocument21 pagesPractica 3. Espacio de EstadoLUISPas encore d'évaluation
- Hoja de Problemas #3Document8 pagesHoja de Problemas #3rafael alvaresPas encore d'évaluation
- CyA Ejercicios Tema1Document6 pagesCyA Ejercicios Tema1AfoldoPas encore d'évaluation
- ServomecanismoDocument12 pagesServomecanismoNaro AlberoniPas encore d'évaluation
- Laboratorio N°1 - Trabajo GrupalDocument22 pagesLaboratorio N°1 - Trabajo GrupalOSCAR VINICIO CHUQUITARCO LAGLAPas encore d'évaluation
- Práctica Calificada 03 Control II 2021-IIDocument3 pagesPráctica Calificada 03 Control II 2021-IIAlex Samuel Ludeña HuamaniPas encore d'évaluation
- Métodos NuméricosDocument8 pagesMétodos NuméricosedsonPas encore d'évaluation
- Informe Final 3Document7 pagesInforme Final 3Harold Cruz SalasPas encore d'évaluation
- Taller Respuesta TkjvghjemporalDocument9 pagesTaller Respuesta TkjvghjemporalLeandro SanchezPas encore d'évaluation
- Cuaderno de Ejercicios de Introducción A La Teoría de Control PDFDocument37 pagesCuaderno de Ejercicios de Introducción A La Teoría de Control PDFMenelao ZubiriPas encore d'évaluation
- Taller Respuesta TemporalDocument9 pagesTaller Respuesta TemporaldaianamarchPas encore d'évaluation
- Introduccion A SimulinkDocument5 pagesIntroduccion A Simulinkalberto pazkual100% (1)
- Model ProblemasDocument23 pagesModel Problemasmindstorm63Pas encore d'évaluation
- Diagrama de Bloques 2Document3 pagesDiagrama de Bloques 2jguerra3dPas encore d'évaluation
- Grupo 33Document11 pagesGrupo 33Wilbert Murillo MPas encore d'évaluation
- Boost CascadaDocument6 pagesBoost CascadaOscar Fabian Posada FandiñoPas encore d'évaluation
- Cap. 3 Diagramas de BloquesDocument19 pagesCap. 3 Diagramas de BloquesDiego AndresPas encore d'évaluation
- Representacion Vectorial y FasorialDocument13 pagesRepresentacion Vectorial y FasorialFernanda LopezPas encore d'évaluation
- Puros EjemplosDocument15 pagesPuros Ejemplosɛɗuɑʀɗѳ cѳpɑʆcuɑPas encore d'évaluation
- Ejercicios 3 - 2022-2Document2 pagesEjercicios 3 - 2022-2Fernando Jose Muñoz PaucarPas encore d'évaluation
- ProblemasDocument158 pagesProblemasuvagorda1Pas encore d'évaluation
- CyA Ejercicios Tema1Document7 pagesCyA Ejercicios Tema1Javier Seco CenalmorPas encore d'évaluation
- TC1 Gu¡a TP#08Document5 pagesTC1 Gu¡a TP#08Camila Belén PepePas encore d'évaluation
- Practica 4 Control ModernoDocument7 pagesPractica 4 Control ModernojesusPas encore d'évaluation
- No SeDocument48 pagesNo SeAgustin BerPas encore d'évaluation
- Análisis de Estado Senoidal PermanenteDocument67 pagesAnálisis de Estado Senoidal PermanenteAntonio J. ArrietaPas encore d'évaluation
- Tarea 3 SLD DesarrolloDocument22 pagesTarea 3 SLD DesarrolloCamilo Bello ArandaPas encore d'évaluation
- Ejercicios de Integrales de Línea, Superficie y VolumenD'EverandEjercicios de Integrales de Línea, Superficie y VolumenÉvaluation : 4 sur 5 étoiles4/5 (2)
- Sistemas eléctricos en régimen no sinusoidalD'EverandSistemas eléctricos en régimen no sinusoidalPas encore d'évaluation
- La ecuación general de segundo grado en dos y tres variablesD'EverandLa ecuación general de segundo grado en dos y tres variablesPas encore d'évaluation
- P5 CoronelDocument6 pagesP5 CoronelWilly SebastianPas encore d'évaluation
- Laplace PDFDocument2 pagesLaplace PDFharry_gomez18Pas encore d'évaluation
- Preparatorio 7Document6 pagesPreparatorio 7Willy SebastianPas encore d'évaluation
- AvrDocument387 pagesAvrEddie Marin100% (4)
- Taller FinalDocument1 pageTaller FinalWilly SebastianPas encore d'évaluation
- Examen Final Dispositivos ElectronicosDocument1 pageExamen Final Dispositivos ElectronicosWilly SebastianPas encore d'évaluation
- Preguntas Higiene-Industrial SISODocument6 pagesPreguntas Higiene-Industrial SISOWilly SebastianPas encore d'évaluation
- Escuela Politécnica Nacional: Sistemas de Control DiscretoDocument1 pageEscuela Politécnica Nacional: Sistemas de Control DiscretoWilly SebastianPas encore d'évaluation
- Intro SimulinkDocument122 pagesIntro SimulinkPablo CepedaPas encore d'évaluation
- D2 SCD 2017a PDFDocument1 pageD2 SCD 2017a PDFWilly SebastianPas encore d'évaluation
- Analisis de Seguridad Estatica y DinamicaDocument56 pagesAnalisis de Seguridad Estatica y DinamicaWilly SebastianPas encore d'évaluation
- Preparatorio 10Document2 pagesPreparatorio 10Willy SebastianPas encore d'évaluation
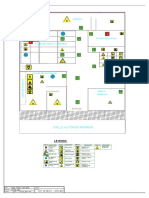
- Mapa de Riesgos Coronel WillyDocument1 pageMapa de Riesgos Coronel WillyWilly SebastianPas encore d'évaluation
- P 10Document9 pagesP 10Willy SebastianPas encore d'évaluation
- Planta de GasDocument10 pagesPlanta de GasWilly SebastianPas encore d'évaluation
- Trabajo SintonizacionDocument2 pagesTrabajo SintonizacionGabrielaPas encore d'évaluation
- Parte1 Aula VirtualDocument34 pagesParte1 Aula VirtualWilly SebastianPas encore d'évaluation
- IntroducciónDocument17 pagesIntroducciónWilly SebastianPas encore d'évaluation
- Redes de Área LocalDocument7 pagesRedes de Área LocalWilly SebastianPas encore d'évaluation
- Comunicaion USART AsincronicaDocument2 pagesComunicaion USART AsincronicaWilly SebastianPas encore d'évaluation
- Simulacion Control Escalar y Vectorial para Maquinas AsincronasDocument4 pagesSimulacion Control Escalar y Vectorial para Maquinas AsincronasWilly SebastianPas encore d'évaluation
- 2018A - P10. Operacion en 4 Cuadrantes de Maquinas ElectricasDocument3 pages2018A - P10. Operacion en 4 Cuadrantes de Maquinas ElectricasStalin MuelaPas encore d'évaluation
- Control de Maquinas Iee853 - Semestre 2015b - Ver16Document579 pagesControl de Maquinas Iee853 - Semestre 2015b - Ver16Willy SebastianPas encore d'évaluation
- Enlace CovalenteDocument31 pagesEnlace Covalentehenry2392100% (5)
- TallerDocument2 pagesTallerWilly SebastianPas encore d'évaluation
- Flujo de Cargas Difuso PDFDocument47 pagesFlujo de Cargas Difuso PDFWilly SebastianPas encore d'évaluation
- Terminos Electricos y de FacturacionDocument14 pagesTerminos Electricos y de FacturaciongonzaloPas encore d'évaluation
- DeberDocument1 pageDeberWilly SebastianPas encore d'évaluation
- Estadistica Descriptiva Con MATLABDocument13 pagesEstadistica Descriptiva Con MATLABMarianela MtzPas encore d'évaluation
- Lab 2 Control II (Trans Z)Document6 pagesLab 2 Control II (Trans Z)NigmanBPas encore d'évaluation
- Definicion Clasica Ecuaciones DiferencialesDocument6 pagesDefinicion Clasica Ecuaciones DiferencialesJimmy GarciaPas encore d'évaluation
- 7 Función Lineal, Afín y Constante 3roDocument3 pages7 Función Lineal, Afín y Constante 3roDiego Alonzo Florez HurtadoPas encore d'évaluation
- Razón de CambioDocument10 pagesRazón de CambioWilmer Velasco Chanta100% (1)
- 1.2 Limite de Funciones UPCDocument16 pages1.2 Limite de Funciones UPCTomás Rodríguez RománPas encore d'évaluation
- EdoDocument9 pagesEdoKevin Santillan MuñozPas encore d'évaluation
- CON RESPUESTAS Reactivos Del Segundo Parcial-MATEMATICAS-1Document28 pagesCON RESPUESTAS Reactivos Del Segundo Parcial-MATEMATICAS-1Jonathan Marchán100% (1)
- Notas DiracDocument21 pagesNotas DiracBenjamín Medina CarrilloPas encore d'évaluation
- Normal 1-1Document1 pageNormal 1-1MALCA IZQUIERDO LIDIA FLORPas encore d'évaluation
- Ejemplo Método de RitzDocument4 pagesEjemplo Método de RitzAnonymous 1xJZPwi100% (1)
- Cómo Calcular Una Función A Partir de Su GráficaDocument7 pagesCómo Calcular Una Función A Partir de Su GráficaIsraelUribeSalazarPas encore d'évaluation
- Triptico Probabilidad CondicionalDocument2 pagesTriptico Probabilidad CondicionalEliana GavelanPas encore d'évaluation
- Control Avanzado 02aDocument119 pagesControl Avanzado 02aKaty LisbethPas encore d'évaluation
- Tratamiento de Señales DigitalesDocument6 pagesTratamiento de Señales DigitalesA.JPas encore d'évaluation
- Actividad 2 Sistema de Ecuacioones LinealesDocument4 pagesActividad 2 Sistema de Ecuacioones Linealesjaneth castroPas encore d'évaluation
- Guía 12Document2 pagesGuía 12Victoria AldunatePas encore d'évaluation
- Método de La Aceleración LinealDocument4 pagesMétodo de La Aceleración LinealFredy Alejandro GilPas encore d'évaluation
- Programación Lineal Método SimplexDocument38 pagesProgramación Lineal Método SimplexLUIS ENRIQUE MELENDEZ CHAVARRIAPas encore d'évaluation
- Introduccion Metodos de IntegracionDocument18 pagesIntroduccion Metodos de IntegracionDarlyzNuñez100% (2)
- Ejemplos MATLAB Ecuaciones No Lineales en IQ MSADocument40 pagesEjemplos MATLAB Ecuaciones No Lineales en IQ MSAFatima Sanchez LopezPas encore d'évaluation
- Funciones Varias Variables 1Document53 pagesFunciones Varias Variables 1Juan RomeroPas encore d'évaluation
- Trabajo Master Curso 2008 09 Carlos PerezDocument70 pagesTrabajo Master Curso 2008 09 Carlos PerezIvan Coronel MarthensPas encore d'évaluation
- 1 Gu A Electrost Tica PDFDocument2 pages1 Gu A Electrost Tica PDFFrancisco Muñoz GrandjeanPas encore d'évaluation
- Operaciones Con PolinomiosDocument2 pagesOperaciones Con Polinomioshilda ramirez100% (1)
- Clases y FrecuenciasDocument21 pagesClases y FrecuenciassyxtynsPas encore d'évaluation
- U2 - Intervalos. Entornos. FuncionesDocument33 pagesU2 - Intervalos. Entornos. FuncionesAraceli MamaniPas encore d'évaluation
- Errores de Redondeo y Truncamiento Parte I PDFDocument25 pagesErrores de Redondeo y Truncamiento Parte I PDFSergio AntolinezPas encore d'évaluation
- UNIDAD I NUMEROS REALES Resolución de Desigualdades de Primer Grado Con Una Incógnita y de Desigualdades Cuadráticas Con Una IncógnitaDocument28 pagesUNIDAD I NUMEROS REALES Resolución de Desigualdades de Primer Grado Con Una Incógnita y de Desigualdades Cuadráticas Con Una IncógnitaGénesis Acosta0% (1)
- Seminario de Algebra IDocument6 pagesSeminario de Algebra IFrank Alex VillalobosPas encore d'évaluation