American Journal of Engineering Research (AJER)
2016
American Journal of Engineering Research (AJER)
e-ISSN: 2320-0847 p-ISSN : 2320-0936
Volume-5, Issue-4, pp-54-62
www.ajer.org
Research Paper
Open Access
Comparative Study of CNC Controllers used in CNC Milling
Machine
Rajendra Rajput1, Dr. Ajay Kumar Sarathe2
1
PG Scholar, Mechanical Engg. Department, NITTTR Bhopal
Associate Professor, Mechanical Engg. Department, NITTTR Bhopal-462002
ABSTRACT : The quality of finished work piece depends on the relative positions between the work pieces,
cutting tool, machining process parameters. It can be achieved if a CNC machine tool possesses sufficient
strength to withstand the cutting forces, stiffness against deformation and capability of CNC controller. CNC
controller is the heart of the CNC machine which controls most of the functions of CNC machine. Accurate and
Perfect machining in minimum time is the requirement of manufacturing industries and along with other
hardware and machining process parameters, CNC control system also playing vital and an important role.
Hence, in this work an attempt is being made to investigate and analyse the comparison of the CNC milling
controllers with same set of parameters. This project gives the detailed comparison of the three major CNC
controllers used by industries on the basis of important parameter.
Keywords - Fanuc, Heidenhain, Machining Time, MRR, Sinumerik,
I.
INTRODUCTION
Controller is a combination CNC computer software, and hardware. Today the CNC are soft wired system that
makes its flexibility for the different operations. Software control all the programming and function of the CNC
machine. and the Computer is a basically responsible to generate signal i.e. supplied to the controller with the
help of communication device or serial port for example the signal generated by the computer are 5V DC
supplied to the controller and it communicate by the communication (DB25) or the serial port (DB9) and by this
way it communicate with the controller hardware. It interprets a language such as G code into the signals.
Computer system is generally operated on system of step and direct format of command signal. Some higher end
machine used proprietary analogue or digital signals but after it is usually a variation of the
step and direction format. In this system the two type of the command send to each driver-(1) Step signal (2)
Direction signal. The communication signal in the form of the wave that is square in the shape and it is known as
Transistor-to-Transistor Logic signal (TTL signal). This signal is a series of small pulses ranging from 0V to 5V
that is represents 0 and 1 in a binary computer language. This signal is a form of the Pulse Width Modulated
signal (PWM signal) where the duration of the pulse is varied to indicate information. The time duration of the
pulse determines the binary code, either 0 or 1 as communicated by the computer and interpreted by the motor
driver. Every motor have some specific step plus time for both 0 and 1 and have different microsecond.
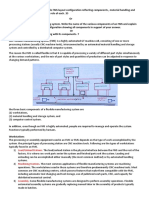
(1) CNC CONTROLLER COMPONENTS
The CNC controller component responsible for the positioning the signals i.e. created by the computer and it
work together with NC software for precise motor control. These all together makes the total control system.
There are three basic component of CNC controller. (1) Power supply unit (2) Circuitry protection system unit
(3) Motor driver unit
www.ajer.org
Page 54
American Journal of Engineering Research (AJER)
2016
Fig.1: Block diagram of controller
(1.1) Power supply unit
Power supply unit is the one of the basic and important part of the CNC system.CNC machine have a low
voltage communication line by which computer directs to the machine. This line is responsible to communicate
the system and the machine. Power source is providing the power for moving, cutting and other machine related
operation.
(1.2) Circulatory protection system unit
The circulatory protection system consist a breakout board that used to isolates signals. It provides the circuitry
protection and distribution inside the controller box. It takes signal from the computer and distributes to desired
drivers. It is also allow to limit switches that feed information back to the computer. Fuses are also part of the
circulatory protection system. Fuses could save the equipment in case of electrical spikes, shorts, or faulty
wiring. A low voltage communication signal passes from the computer through the break down board
unchanged to the motor drivers. This isolated the computer from the circuit but also allows the signals to carry to
the motor drivers.
(1.3) Motor system unit
The motor drivers receives the signals and then coordinates pulses of the desire current and voltage to elicit the
movement in the drive motors. The motor drivers communicate position information from one way to the motor
in the open loop system. And in another way its send and receives the position information in the close loop
system
(2) STUDY IS FOCUSED ON CONTROLLERS
This research work mainly focused on the three controllers. (1) FANUC 21 M (2) SINUMERIC 840D (3)
HEIDENHAIN TNC 426
(1.1) Features of FANUC 21 M
Its having 5 axes control. And have 4 control spindle and its can control 4 simultaneous controlled axes. This
controller is specially design for the milling machining procedure. Its having the machining accuracy in the
range of the 1 m of the control. Both manually and through machine the input can be given to it. Its having
facility of conditional and unconditional jump.ATC handle ability, pitch error compensation and zero offset
compensation also in the FANUC 21 M. Mostly feature of the FANUC and SIMUNERIK are almost same.
(1.2) Features of SINUMERIK 840D
This controller has simultaneous axis control capacity with telediagnosis facility. And it is having the surface
motion guidance system. Both manually and through machine software the input can be given to it. And Its
having facility of conditional and unconditional jump. ATC handle ability, pitch error compensation and zero
offset compensation also in the SINUMERIK 840D.this feature is same in the SINUMERIK series 840 and the
FANUC 21 series.
(1.3) Features of HEIDENHAIN TNC 426
Its having the facility Shop-floor programmable contouring controls for milling, drilling and boring machines,
and it have machine centers with up to five axes. It has the facility to change the angular position of the spindle
under program control. It is able to handle more complex component as compare to other controller and Input &
machining accuracy is very good. Linear movement is possible in up to the 4 axes simultaneously. Its having
the facility to Returning to the contour after an interruption.
www.ajer.org
Page 55
American Journal of Engineering Research (AJER)
II.
2016
LITRETURE RIVIEW
Sungchul Jee et al. [1] this paper introduces a new cross-coupling controller with a rule-based fuzzy logic
control. It is asserted that fuzzy logic controllers provide a better and accurate transient response (which is
essential for better contour accuracy during transient motions) than the conventional controllers, such as PID
controllers, and it cross coupling controllers perform better than axial controllers in trajectory tracking by
machine tools. In this paper, a fuzzy logic controller and a cross-coupling controller are combined to reduce and
control the contour errors. A simulation of the FLCCC was performed and it was implemented on a CNC
milling machine, the simulation and the experimental results show improved contour accuracy over the
conventional cross- coupling controller.
Ahmet Murat PINAR et al. [2] has suggested algorithm for minimizing the machining time of CNC part
programming used in a vertical machining centre with the help of time calculator and CNC code editor .An
algorithm was prepared and send from machine to CNC code editor with the cable (RS-232) i.e. used for
minimizing the machining time of CNC part programs used in a vertical machining centre.. As resulted
reanalyzing the new CNC program with the time calculation processor, the time save has been seen.
Sayyad naimuddin, et al. [3] developed an intelligent and very useful scheme to control the CNC machine under
sudden breakdown condition. The work comprises to develop and program of a fuzzy controller for a closed
loop speed control where the manipulated variable is the speed relation and, therefore, the slip value. The sudden
power failure occurs at 0.5 second can be immediately recovered by the fuzzy controller at 1 second. The actual
environment is immediately build up in the Makino A77 CNC machine which minimizes breakdown. This will
help in minimizing the breakdown and controlled sudden breakdown, results in the enhancement of productivity.
MA Xiong- bo et al. [4] shown with the use of that method, the increasing of the degree of the reusability and
openness leads to the decrement in the maintains cost and development time. 3-axis milling machine tool testbed designed by means of the constructed software function module library and the system configuring method.
The name of that machine is HIT-CNC that is along with the open architecture controller system. Control
parameter like number of axis can be created by this control system. In this paper, after close scrutiny of the
ways to realize the basic functions, a whole new structure of the controller is designed and a prototype is worked
out on PC on the ground of OMAC (open modular architecture controller). The experimental results corroborate
the gain of a satisfactory openness characterized by extendibility, modularity, portability, and scalability,
reusability.
Mr. Sc. Afrim Gjelaj, et al. [5] discussed programming and simulation of work piece through CNC Mikron
Milling machine, with using of the machine software as such HEIDENHAIN iTNC 530, MasterCAM. Its
improved the productivity and machining time of the work piece.
QU Xin-he et al. [6] show the difference in between three-axis and the five-axis boring fixed loop program with
the help of postprocessor. CATIA is used as design software and the characteristic is analysis over the
SINUMERIK 840D system and C50 machine. Cycle E86 is used to analysis the result of the post processing
algorithm. Result shows that the experimental variation of the three-axis and five-axis boring cycle program.
Experimental results revels that five-axis boring closed loop program is more effective as compare to other.
D.Dimitrov et al. [7] had given comparison between 3-axis machining and 5-axis cutting machining with
CAD/CAM system in various case study like Hermle C40U dynamic HSC milling centre was used with the
CAM programming with the help of utilizing Delcams Power mill, found that Using 5-axis machining the
routing fixture could be machined in a single setup, with the help of this minimize processing and lead time.
This study shows comparison of the 3axis and 5 axes machining with different parameters.
Kotaro Nagaokaa et al.[8] discussed a suitable compensator design for mechanical errors through case studies.
The numerical simulation analysis indicate that an appropriate design of a dynamic model increase the motion
accuracy of the tool center point.
Martin Eckstein, et al. [9] describes a new approach in real-time monitoring for drilling bolt holes in Inconel718.
By extracting and processing controller data with non-linear algorithms. The Process related data origination
from the NC of a SINUMERIC 840D Controllers.
Sergej N.Grigorieva, et al. [10] analyzed a method to simultaneously increase the accuracy and decrease the
calculation time for complex tool path programming in multi-axis machining centers. The algorithms developed
for the CAD/CAM software that allows for NC programming and machining on 5-axis centers employing any
design model. That is improving the processing time in the complex job.
www.ajer.org
Page 56
American Journal of Engineering Research (AJER)
2016
XU Xiao-minga et al [11] discussed an open CNC system based on PC and motion controller, Software and
hardware of the system based on the idea of modularization construction. According to requirements of
software, a kind of rings structure as the system management software development model is designed. A new
algorithm has been developing that is able to control spline interpolation B-spline interpolation. The
experimental result shows that the CNC system is effective. Two interpolation algorithms is developed based on
motion controller interface, to cater the lack of which not supporting spline curve interpolation of motion
controller, so as to enhance the functionality of numerical control system.
III.
RESEARCH METHODOLOGY
In this research study Al 6061-T6 is taken as the material with the dimensions of 805812 mm. EMCO 250
concept mill machine is used for the machining work and study of focus on the EMCO CONCEPT 250 CNC
milling, because its having facility of interchangeable controller system. Its having a facility of changing of
three different-different controllers i.e. FANUC, SINUMERIK, and HEIDENHAIN. After selecting the proper
geometry the part programming is design for the given geometry. Machining time is calculated with the help of
the digital time watch. And for the measurement of the MRR the digital weight measuring machine is used.
Table-1: Properties of Al 6061- T6
Name of property
Grade
Value
T6
Ultimate Tensile strength
300 Mpa
Yield strength
241 Mpa
Young modulus
69 Gpa
Shear strength
207 Mpa
Thermal conductivity
167 W/m-k
Elongation
8%-10%
Specific heat capacity
0.896 j/g-C
Density
2.70 g/cm2 or 2700 kg/m3
Melting point
582 C
Electrical resistivity
3.99 ohm-cm
Solidus temperature
582 C
Liquidus temperature
652 C
Fig. 2: EMCO CONCEPT MILL 250 machine tool
www.ajer.org
Page 57
American Journal of Engineering Research (AJER)
2016
Fig. 3: Drawing of the work
(1) Material Removal Rate (MRR)
MRR is calculated using the volume loss from the work piece material as cubic millimeter per minute
(mm3/min). The weight loss i.e. difference between the weight of work piece before machining and the weight
of the work piece after machining is measured by an electronic balance weight measuring machine with a least
count of 0.001 gm. Depth of cut 0.5 mm is taken in ten steps.
Fig.4: Pictorial representation of the preparation of the workpiece
www.ajer.org
Page 58
American Journal of Engineering Research (AJER)
2016
(2) CONTROLLER PROGRAMMING
This part of the work includes the Part programming i.e. program made for the different CNC controllers. The
program made for all three controllers are shown in the form of the picture and written. Programming are
arrange in the order of the HEIDENHAIN 426 TNC, SINUMERIK 840D and FANUC 21 M respectively. In
case of HEIDENHAIN controller we have select IZ-0.5(cutting depth in z direction) with REP 9/9. First its take
1 complete slot cutting than after it takes the 9 repetition of it so overall its 10. This is the feature of
HEIDENHAIN controller. In case of FANUC and SINUMERIK, we have selected the direct 10 repetitions. We
have select feed as 100 (mm/min) for the inserting of the tool into the material. Than we change it, according to
the practical problem that is 450, 500, 550, and 600.we also change the corresponding spindle speed with respect
to the feed that is 1500, 1600, 1850, and 2000. Manual Part program were developed for three controllers and
executed.
IV.
RESULTS
On the basis of experimental work, performance measure i.e. MRR and machining time are calculated and
presented in following table-1 shows the experimental values of machining time. Based on the manual
programming & operation, measured reading in the form of the minute: second: millisecond. [(00:00:00) = (m:
s: s)]
Table-2: Machining Time
S.NO.
Machining
parameters
RS
CR 1
CR 2
RS
CR 1
CR 2
5:47:55
2:06:37
2:55:05
5:15:77
1:58:10
2:42:26
Time on
SINUMERIK
840D
5:47:79
2:07:19
2:55:58
5:16:85
1:59:07
2:42:93
F=550
SS=1800
DOC=5
RS
CR 1
CR 2
4:53:25
1:50:53
2:31:76
4:54:99
1:50:59
2:31:92
4:56:02
1:52:53
2:32:50
F=600
SS=2000
DOC=5
RS
CR 1
CR 2
4:28:01
1:44:30
2:19:68
4:29:27
1:45:98
2:20:03
4:30:41
1:46:54
2:21:84
F=450
SS=1500
DOC=5
F=500
SS=1650
DOC=5
Geometry
Time on
HIEDIENHAIN 426 TNC
Time on
FANUC 21 M
5:49:77
2:08:17
2:58:15
5:18:07
2:00:84
2:44:48
(1) EFFECT ON MATERIAL REMOVAL RATE (MRR)
On the basis of experimental results of MRR calculated according to measured values are given in table-2 on the
basis of the experiment the result shows that MRR controller wise.
Table-3: MRR Data Controller wise
S
No.
Controller
Feed
(mm/
min)
Spindle
speed
(rpm)
Workpiece weight
(Gram : milligram)
Before
machining
After
machining
Diff.
MRR
(mm3/min)
450
1500
144.68
122.89
21.79
746.137
500
1650
145.62
124.67
20.95
780.97
550
1800
144.96
123.07
21.89
868.459
600
2000
147.69
126.17
20.83
904.041
450
1500
143.92
122.85
21.07
719.726
HEIDENHAIN
426 TNC
www.ajer.org
Page 59
American Journal of Engineering Research (AJER)
S
No.
Controller
SINUMERIK
840D
7
8
9
10
FANUC 21 M
11
12
Feed
(mm/
min)
Spindle
speed
(rpm)
Workpiece weight
(Gram : milligram)
Before
machining
After
machining
2016
Diff.
MRR
(mm3/min)
500
1650
146.03
125.10
21.58
776.540
550
1800
145.05
123.79
21.26
848.545
600
2000
145.07
124.84
20.23
872.459
450
1500
146.85
125.77
21.08
713.963
500
1650
144.81
124.50
20.31
747.966
550
1800
143.20
122.36
20.84
825.448
600
2000
145.33
125.21
20.12
861.844
On the basis of experimental results of MRR data is represented according to experiment set no. shown in table3 on the basis of the experiment the result shows that MRR controller wise.
Table-4: MRR Data experiment set no. wise
Exp.
Set
No.
Controller
HEIDENHAIN
426 TNC
SINUMERIK
840D
FANUC 21 M
HEIDENHAIN
426 TNC
SINUMERIK
840D
FANUC 21 M
HEIDENHAIN
426 TNC
SINUMERIK
840D
FANUC 21 M
HEIDENHAIN
426 TNC
SINUMERIK
840D
FANUC 21 M
Feed
(mm/
min)
Spindle
speed
(rpm)
Workpiece weight
(Gram : milligram)
Before
machining
After
machining
Diff.
MRR
(mm3/min)
450
1500
144.68
122.89
21.79
746.137
450
1500
143.92
122.85
21.07
719.726
450
1500
146.85
125.77
21.08
713.963
500
1650
145.62
124.67
20.95
780.97
500
1650
146.03
125.10
21.58
776.540
500
1650
144.81
124.50
20.31
747.966
550
1800
144.96
123.07
21.89
868.459
550
1800
145.05
123.79
21.26
848.545
550
1800
143.20
122.36
20.84
825.448
600
2000
147.69
126.17
20.83
904.041
600
2000
145.07
124.84
20.23
872.459
600
2000
145.33
125.21
20.12
861.844
(2) COMPARISON OF MRR (mm3/min)
Comparison of MRR is shown in figure-5 as per experimental values. After analysis of the experimental results
we can see the FANUC 21 M have lowest MRR while the HEIDENHAIN have highest MRR.
www.ajer.org
Page 60
American Journal of Engineering Research (AJER)
2016
Fig.5: Comparison of MRR
Fig.6: MRR and Feed variation with controller
Fig.7: MRR and Speed variation with controllers
As shown in Fig 6 and Fig 7 between the MRR and feed, and MRR and speed respectively, that shows the
variation of MRR for the particular speed and feed. Results are clearly shows that for a given geometry and
given material the value of MRR is high for the HEIDENHAIN TNC 426 controller. But variation is clearly
shows that FANUC 21 M has the lowest value among selected controllers.
www.ajer.org
Page 61
American Journal of Engineering Research (AJER)
2016
(3) CONTROLLER PROCESSING TIME
CNC controllers processing time calculation is done on the basis of time study pattern. On the basis of the
experimental work some important results have been obtained. On the basis of the experimental investigation the
main finding is that for a same geometry, same set of parameters related to the machining and respective manual
part programme the controller processing time is different in all three controllers considered for this study.
Controller machining processing time is more for FANUC 21M and SINUMERIK 840D as compared to the
HEIDENHAIN TNC 426. Overall controller processing time is less for the HEIDENHAIN TNC 426 as compare
to SINUMERIK 840D and FANUC 21 M. The experimental program data input time is high in case of FANUC
21 M as comparison to the other two. It is also noted that referencing time is more for the H TNC 426 as
compared to the other two controllers except program execution time all other time can varies to person to
person. It depends upon skills of the machine operator.
V.
CONCLUSION
Overall the research study reveals that the differentdifferent CNC controllers have the different features. This
research study conclude that for the given geometry, the result are better for the HEIDENHAIN 426 TNC and
SINUMERIK 840D milling controller as compare to the FANUC 21M for the given geometry or job some more
important result are concluded during this work. Different Controllers are having different capabilities, so we
need to identify the right controller for right job that can minimize the machining time and ultimately optimize
the associated parameters. Average processing time for the HEIDENHAIN TNC 426 is minimum as compared
to other two controllers. In some observations, the results of SINUMERIK 840D are very near to the
HEIDENHAIN TNC 426. MRR is found dependent on the controller features. During this work MRR is found
high for the H TNC 426, than compared low for the S 840D and lowest for the F 21 M.
REFERENCES
Journal Papers:
[1]
[2]
[3]
[4]
[5]
[6]
[7]
[8]
[9]
[10]
[11]
[12]
[13]
[14]
[15]
[16]
[17]
[18]
[19]
[20]
[21]
Sungchul Jee, KSME International Journal, Vol. 12, No. 5, pp. 800~810, 1998
Admit Murat PINAR, Abdulkadir GULL Time Minimization of CNC Part Programs in a Vertical Machining Center in Terms of
Tool Path and Cutting Parameter Criteria in Turkish J. Eng. Env. Sci. 29 (2005), 75 88
Sayyad Naimuddin, S. B. Warkad, Dr. G. M. Dhole, Mohammad Nasiruddin
Journal of Theoretical and Applied Information
Technology, 2005 JATIT www.jatit.org
MA Xiong-bo, HAN Zhen- yu, WANG Yong-zhang, Fu Hong-ya Chinese Journal of Aeronautics 20 (2007) 272-281
Sc. Afrim Gjelaj, Dr. sc. Avdyl Bunjaku, Programming and simulation of work piece in cnc milling machine in 14th
International Research/Expert Conference Trends in the Development of Machinery and Associated Technology in TMT 2010,
Mediterranean Cruise, 11-18 September 2010
QU Xin-he1, LU Yuan1, LI Zhen-hua, http://en.cnki.com.cn/Journal_en/B-B022-ZHJC- 2010-08.htm , 2010
D.Dimitrov, M. Saxer Productivity Improvement in Tooling Manufacture through High Speed 5 Axis Machining in Procedia
CIRP 1(2012)277 282, 5th CIRP Conference on High Performance Cutting 2012
Kotaro Nagaokaa and Atsushi Matsubarab Improving motion accuracy of tool center point using model-reference feed forward
controller in Procedia CIRP1 (2012) 605 608,5th CIRP Conference on High Performance Cutting 2012
Martin Ecksteina, Ildiko Mankovab Monitoring of Drilling Process for Highly Stressed Aero engine Components Procedia
CIRP1 (2012) 587 592 in 5th CIRP Conference on High Performance Cutting 2012
Sergej N. Grigorieva, A.A. Kutinb, V.V.Pirogovc Advanced method of NC programming for 5-axis machining in Procedia
CIRP1 (2012)102107 5th CIRP Conference on High Performance Cutting
XU Xiao-minga, LI Yia SUN Ji-honga WANG Shuo-guib, 2012 International Workshop on Information and Electronics
Engineering (IWIEE), Procedia Engineering 29 (2012) 1845 1850
Petr Vavruska, Engineering MECHANICS, Vol.19, 2012, No.4, p.219229
Abhishek Kumar Saroj, Dr. S.C Jayswal Analysis of Different Parameters on Tool Path for Machining Sculptured Surfaces
International Journal of Engineering Research & Technology (IJERT) Vol. 2 Issue 10, October 2013 ISSN: 2278-0181
S. Daneshmand, M. Mirabdolhosayni and C. Aghanajafi, Sifting Through the Optimal Strategies of Time-Based Tools Path
Machining in Software CAD-CAM in Middle-East Journal of Scientific Research 13 (7): 844-849, 2013 ISSN 1990-9233
Khairul Akmal Shamsuddin, A.R.Ab-Kadir, and Mohd Hairizal Osman A Comparison of Milling Cutting Path Strategies for
Thin- Walled Aluminum Alloys Fabrication The International Journal Of Engineering And Science (IJES) Volume 2 Issue 3
Pages 01-08 2013 ISSN: 2319 1813 ISBN: 2319 180
Rakesh Prajapati,Avadhoot Rajurkar,Vijaykumar Chaudhary Tool Path Optimization of Contouring Operation and Machining
Strategies for Turbo Machinery Blades in (IJETT) - Volume4Issue5- May 2013
Gustavo M .Minquiza, Vicente Borjaa, Marcelo Lopez-Parra, Alejandro C. Ramrez-Reivicha, Miguel A. Domnguezb,
Alejandro 586, 6th CIRP International Conference on High Performance Cutting, HPC 2014,
N .V. Malvade, S. R. Nipanikar Malvade et al, optimization of cutting parameters of end milling on VMC using TAGUCHI
method Journal of Engineering Research and Studies ,E-ISSN0976-7916, Vol. V/ Issue II/April-June, 2014/14-17,J Engg. Res
Studies /Vol. V/ Issue II/April-June, 2014/14-17
S B Chikalthankar et al. Investigation and optimization of various machining Parameters Affecting the Effectiveness of Turning:
A Review International Journal of Engineering Research & Technology (IJERT) ISSN: 2278-0181, Vol. 3 Issue 5, May - 2014
Christian C. Mbaocha, Lakpah Emmanuel A., Jonathan A. Emmanuel International Journal of Scientific and Research
Publications, Volume 5, Issue 8, August 2015, 1 ISSN 2250-3153
Pedro Ponce, Arturo Molina, Guillermo Tello, Luis Ibarra, Brian MacCleery and Miguel Ramirez, IFAC-Papers Online 48-3
(2015) 22032207
www.ajer.org
Page 62
Vous aimerez peut-être aussi
- Machine Tools, Metal Cutting Types World Summary: Market Values & Financials by CountryD'EverandMachine Tools, Metal Cutting Types World Summary: Market Values & Financials by CountryPas encore d'évaluation
- CNCDocument98 pagesCNCRohit SinghPas encore d'évaluation
- CNC Common Terms PDFDocument2 pagesCNC Common Terms PDFShaival JhaPas encore d'évaluation
- CNC Mill ProgrammingDocument24 pagesCNC Mill ProgrammingZahidah AmaninaPas encore d'évaluation
- Introduction To Introduction To Computer Numerical Control: Computer Aided Manufacturing TECH 4/53350 1Document11 pagesIntroduction To Introduction To Computer Numerical Control: Computer Aided Manufacturing TECH 4/53350 1BabuRaoThellaPas encore d'évaluation
- CNC Programmer Job Description PostingDocument2 pagesCNC Programmer Job Description Postingsmith9krPas encore d'évaluation
- Invo MillingDocument8 pagesInvo MillingOvidiu StoianPas encore d'évaluation
- CNC TurningDocument13 pagesCNC TurningJAMES JUDYPas encore d'évaluation
- Introduction of CNC Milling To First-Year Engineering Students With Interests inDocument10 pagesIntroduction of CNC Milling To First-Year Engineering Students With Interests ineliiiiiiPas encore d'évaluation
- CNC Stands For Computer Numerical Control, And: G-Code. CNC Was Developed inDocument4 pagesCNC Stands For Computer Numerical Control, And: G-Code. CNC Was Developed inKhateeb Ul Islam QadriPas encore d'évaluation
- Automatic Automatic Generating CNC-Code For Milling MachineGenerating CNC Code For Milling MachineDocument7 pagesAutomatic Automatic Generating CNC-Code For Milling MachineGenerating CNC Code For Milling MachineVikas Singh SisodiaPas encore d'évaluation
- Cam Lab ManualDocument14 pagesCam Lab Manualelangandhi0% (1)
- MTM Lab PresentationDocument26 pagesMTM Lab PresentationMuhammad WaseemPas encore d'évaluation
- The Synergies of Hybridizing CNC and Additive ManufacturingDocument8 pagesThe Synergies of Hybridizing CNC and Additive ManufacturingdemuxPas encore d'évaluation
- Heidenhain TNC 620 User ManualDocument48 pagesHeidenhain TNC 620 User ManualBombacı MülayimPas encore d'évaluation
- Recommendations For Thread Milling Cutters: Materials and Application RecommendationsDocument1 pageRecommendations For Thread Milling Cutters: Materials and Application RecommendationsHaizmeer BonziePas encore d'évaluation
- DMG-iTNC530 MillProgManual (533 190-23) PDFDocument789 pagesDMG-iTNC530 MillProgManual (533 190-23) PDFMACKAY9999Pas encore d'évaluation
- The Use of Variables, Macros and Subroutines and Compatibility With FANUC Parametric Programming ......................... 3Document10 pagesThe Use of Variables, Macros and Subroutines and Compatibility With FANUC Parametric Programming ......................... 3Jérôme GRANGEPas encore d'évaluation
- Doosan G76Document17 pagesDoosan G76Pham LongPas encore d'évaluation
- Ncguide CNC Simulator: Ncguide (E) - 01,2016.4, Printed in JapanDocument4 pagesNcguide CNC Simulator: Ncguide (E) - 01,2016.4, Printed in JapanIvo DimitrovPas encore d'évaluation
- Computer Numerical Control CNC: Ken Youssefi Mechanical Engineering DepartmentDocument43 pagesComputer Numerical Control CNC: Ken Youssefi Mechanical Engineering DepartmentSreedhar PugalendhiPas encore d'évaluation
- Measuring Cutting Forces PDFDocument14 pagesMeasuring Cutting Forces PDFprof_panneerPas encore d'évaluation
- PC Fapt BrochureDocument2 pagesPC Fapt Brochurebabak671Pas encore d'évaluation
- 3-Axis CNC Milling DeviceDocument2 pages3-Axis CNC Milling Devicejehan11Pas encore d'évaluation
- Probes HeidenhainDocument64 pagesProbes HeidenhainfbalestrinPas encore d'évaluation
- CNC SoftwareDocument11 pagesCNC SoftwareTegoeh SankenryokuPas encore d'évaluation
- Hass AnswersDocument7 pagesHass AnswersRelu ChiruPas encore d'évaluation
- Touch Probe Cycles: Product InformationDocument6 pagesTouch Probe Cycles: Product Informationsonnv_hcmutePas encore d'évaluation
- 03 CNCDocument28 pages03 CNCmmkattaPas encore d'évaluation
- iTNC 530: User's Manual Heidenhain Conversational ProgrammingDocument729 pagesiTNC 530: User's Manual Heidenhain Conversational ProgrammingCarlos Aguilar MontemayorPas encore d'évaluation
- 11 Cad Cam CNC Programming MVVDocument37 pages11 Cad Cam CNC Programming MVVbassem smatiPas encore d'évaluation
- Cutting Force of End Cutting Tool Milling MachiningDocument24 pagesCutting Force of End Cutting Tool Milling MachiningGabryel BogdanPas encore d'évaluation
- CNC MillingDocument18 pagesCNC MillingShegs Jefferson JosephPas encore d'évaluation
- Lazyturn Manual Rev 5Document49 pagesLazyturn Manual Rev 5s45rebatbnPas encore d'évaluation
- THB360Document581 pagesTHB360Favoreel PatrickPas encore d'évaluation
- CNC CodexDocument10 pagesCNC CodexAmar AshrafPas encore d'évaluation
- Artist 29L0239625G - Rev01Document73 pagesArtist 29L0239625G - Rev01Carlos Jadán100% (1)
- My CNC TurningDocument7 pagesMy CNC Turningde_stanszaPas encore d'évaluation
- G and M Codes For CNCDocument2 pagesG and M Codes For CNCRajesh Kumar PPas encore d'évaluation
- 9 Analytical and Experimental Determination of Cutting ForcesDocument14 pages9 Analytical and Experimental Determination of Cutting ForcesPRASAD326100% (1)
- CNC AutomationDocument19 pagesCNC Automationsameersaurabh5Pas encore d'évaluation
- Incremental Sheet Metal Forming On CNC Milling Machine-ToolDocument4 pagesIncremental Sheet Metal Forming On CNC Milling Machine-ToolDionysius WahyoePas encore d'évaluation
- Super Mill ManualDocument77 pagesSuper Mill Manualshantanu kadamPas encore d'évaluation
- Computer Numerical Control Machine: By-Er - Ved PrakashDocument28 pagesComputer Numerical Control Machine: By-Er - Ved Prakashyogesh borsePas encore d'évaluation
- Jyoti CNCDocument46 pagesJyoti CNCAmit Vora100% (1)
- HMC BasicDocument14 pagesHMC BasicShashankPas encore d'évaluation
- CNC Turning Programming Fundementalsls, Step by StepDocument14 pagesCNC Turning Programming Fundementalsls, Step by Stepschriener50% (2)
- Cad Cam3 Unit NeelimaDocument96 pagesCad Cam3 Unit Neelimasatish86Pas encore d'évaluation
- Milling PDFDocument282 pagesMilling PDFDulis DulisPas encore d'évaluation
- Kinematics of Machinery ManualDocument29 pagesKinematics of Machinery ManualShubham NaikPas encore d'évaluation
- Series8000LatheOperation PDFDocument324 pagesSeries8000LatheOperation PDFSnaldo EstradaPas encore d'évaluation
- Mba-058-En 02 1310 Cert Education MedDocument12 pagesMba-058-En 02 1310 Cert Education Medchristian111Pas encore d'évaluation
- TcposamDocument96 pagesTcposamrohitPas encore d'évaluation
- International Journal of Computational Engineering Research (IJCER)Document5 pagesInternational Journal of Computational Engineering Research (IJCER)International Journal of computational Engineering research (IJCER)Pas encore d'évaluation
- An Overview of PLC Based Control Panel System For External Plunge Grinding Machine and CNC MachineDocument3 pagesAn Overview of PLC Based Control Panel System For External Plunge Grinding Machine and CNC MachineIJMERPas encore d'évaluation
- Amp Question BankDocument14 pagesAmp Question BankdibyenindusPas encore d'évaluation
- Alarmes Fanuc 16i TBDocument78 pagesAlarmes Fanuc 16i TBmanuali-calogero100% (1)
- Forsum FS1325M MarbleDocument6 pagesForsum FS1325M MarbleAbdulRazzaq SaifiPas encore d'évaluation
- Catalog YaweiDocument35 pagesCatalog Yaweihongngoc2003.vnPas encore d'évaluation
- American Woodworker 161Document76 pagesAmerican Woodworker 161Emilian Baluta100% (1)
- InventorCAM 2019 IMachining Getting StartedDocument45 pagesInventorCAM 2019 IMachining Getting Startedomur.kuvvetliPas encore d'évaluation
- NOVEMBER 2021 Surplus Record Machinery & Equipment DirectoryDocument719 pagesNOVEMBER 2021 Surplus Record Machinery & Equipment DirectorySurplus RecordPas encore d'évaluation
- Indramat Rac Series 3 Manual PDFDocument54 pagesIndramat Rac Series 3 Manual PDFfilipaclementePas encore d'évaluation
- Hypertherm Power Max 105Document2 pagesHypertherm Power Max 105RetroPlasmaPas encore d'évaluation
- Stanki ISOGDocument16 pagesStanki ISOGalmedin_hecimov8494Pas encore d'évaluation
- Centroid v3.16 Mill Operator ManualDocument307 pagesCentroid v3.16 Mill Operator ManualEmmanuel GaytanPas encore d'évaluation
- FMS AnswersDocument8 pagesFMS AnswersAnmol SetiaPas encore d'évaluation
- ZOLLER Brochure OverviewDocument11 pagesZOLLER Brochure Overviewjunjie 422Pas encore d'évaluation
- Robotization of Machine ToolsDocument23 pagesRobotization of Machine Toolsgilles bangPas encore d'évaluation
- Introduction CNC PlasmaDocument2 pagesIntroduction CNC PlasmaHaziq PazliPas encore d'évaluation
- HNT Brettschichtholz enDocument16 pagesHNT Brettschichtholz enZdep OniuqaPas encore d'évaluation
- Series 0+-MODEL F Plus: Easier To Use The World Standard CNC From FANUCDocument16 pagesSeries 0+-MODEL F Plus: Easier To Use The World Standard CNC From FANUCWazabi MooPas encore d'évaluation
- Quality Gear Inspection - Part II PDFDocument4 pagesQuality Gear Inspection - Part II PDFsurawutwijarn100% (1)
- ME61 315 R03aDocument445 pagesME61 315 R03aJesus MedinaPas encore d'évaluation
- Root Cause Analysis Example Manufacturing RCA Report FULLDocument10 pagesRoot Cause Analysis Example Manufacturing RCA Report FULLperdhana2000100% (1)
- Technology and The Transformation of WorkDocument22 pagesTechnology and The Transformation of WorkSuryateja MerguPas encore d'évaluation
- Single Head Nest Detail: Turbonest F644-12Mm-S355-04Document5 pagesSingle Head Nest Detail: Turbonest F644-12Mm-S355-04Vv ZzPas encore d'évaluation
- CNC Program VerificationDocument3 pagesCNC Program VerificationRajendra Kumar YadavPas encore d'évaluation
- Five-Axis Flank Milling and Modeling The Spiral Bevel Gear With A Ruled Tooth Surface DesignDocument137 pagesFive-Axis Flank Milling and Modeling The Spiral Bevel Gear With A Ruled Tooth Surface DesignHamza RehmanPas encore d'évaluation
- Topic-Basic Concept of CNC Machine and Programing: Jyoti CNC Automation Pvt. LTDDocument15 pagesTopic-Basic Concept of CNC Machine and Programing: Jyoti CNC Automation Pvt. LTDVijay DharajiyaPas encore d'évaluation
- Sprutcam: Cam Software Solution For Your Manufacturing NeedsDocument9 pagesSprutcam: Cam Software Solution For Your Manufacturing Needsحسين الساهيPas encore d'évaluation
- Machine Tools 2012Document28 pagesMachine Tools 2012Mihai-Alin StamatePas encore d'évaluation
- Simple Step For CNC (V1.1)Document6 pagesSimple Step For CNC (V1.1)nirwoyoPas encore d'évaluation
- Doosan Lynx 2100 ManualDocument32 pagesDoosan Lynx 2100 ManualIslam AttiaPas encore d'évaluation
- Courses-DetailsDocument35 pagesCourses-Detailsraghuvardhan41Pas encore d'évaluation
- The Laws of Thermodynamics: A Very Short IntroductionD'EverandThe Laws of Thermodynamics: A Very Short IntroductionÉvaluation : 4.5 sur 5 étoiles4.5/5 (10)
- Pressure Vessels: Design, Formulas, Codes, and Interview Questions & Answers ExplainedD'EverandPressure Vessels: Design, Formulas, Codes, and Interview Questions & Answers ExplainedÉvaluation : 5 sur 5 étoiles5/5 (1)
- Hyperspace: A Scientific Odyssey Through Parallel Universes, Time Warps, and the 10th DimensionD'EverandHyperspace: A Scientific Odyssey Through Parallel Universes, Time Warps, and the 10th DimensionÉvaluation : 4.5 sur 5 étoiles4.5/5 (3)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionD'EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionÉvaluation : 4.5 sur 5 étoiles4.5/5 (543)
- Vibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisD'EverandVibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisÉvaluation : 4 sur 5 étoiles4/5 (2)
- Basic Digital Signal Processing: Butterworths Basic SeriesD'EverandBasic Digital Signal Processing: Butterworths Basic SeriesÉvaluation : 5 sur 5 étoiles5/5 (1)
- Chasing the Demon: A Secret History of the Quest for the Sound Barrier, and the Band of American Aces Who Conquered ItD'EverandChasing the Demon: A Secret History of the Quest for the Sound Barrier, and the Band of American Aces Who Conquered ItÉvaluation : 4 sur 5 étoiles4/5 (25)
- Bulk Material Handling: Practical Guidance for Mechanical EngineersD'EverandBulk Material Handling: Practical Guidance for Mechanical EngineersÉvaluation : 5 sur 5 étoiles5/5 (1)
- Electrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tD'EverandElectrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tÉvaluation : 4.5 sur 5 étoiles4.5/5 (27)
- 1,001 Questions & Answers for the CWI Exam: Welding Metallurgy and Visual Inspection Study GuideD'Everand1,001 Questions & Answers for the CWI Exam: Welding Metallurgy and Visual Inspection Study GuideÉvaluation : 3.5 sur 5 étoiles3.5/5 (7)
- Machinery's Handbook Pocket Companion: Quick Access to Basic Data & More from the 31st EditionD'EverandMachinery's Handbook Pocket Companion: Quick Access to Basic Data & More from the 31st EditionPas encore d'évaluation
- Programming the Raspberry Pi, Third Edition: Getting Started with PythonD'EverandProgramming the Raspberry Pi, Third Edition: Getting Started with PythonÉvaluation : 5 sur 5 étoiles5/5 (2)
- Einstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseD'EverandEinstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseÉvaluation : 4.5 sur 5 étoiles4.5/5 (51)
- Multiplexed Networks for Embedded Systems: CAN, LIN, FlexRay, Safe-by-Wire...D'EverandMultiplexed Networks for Embedded Systems: CAN, LIN, FlexRay, Safe-by-Wire...Pas encore d'évaluation
- Pilot's Handbook of Aeronautical Knowledge (2024): FAA-H-8083-25CD'EverandPilot's Handbook of Aeronautical Knowledge (2024): FAA-H-8083-25CPas encore d'évaluation
- The Journeyman Electrician Exam Study Guide: Proven Methods for Successfully Passing the Journeyman Electrician Exam with ConfidenceD'EverandThe Journeyman Electrician Exam Study Guide: Proven Methods for Successfully Passing the Journeyman Electrician Exam with ConfidencePas encore d'évaluation
- Retro Gaming with Raspberry Pi: Nearly 200 Pages of Video Game ProjectsD'EverandRetro Gaming with Raspberry Pi: Nearly 200 Pages of Video Game ProjectsPas encore d'évaluation
- Cyber-Physical Systems: Foundations, Principles and ApplicationsD'EverandCyber-Physical Systems: Foundations, Principles and ApplicationsHoubing H. SongPas encore d'évaluation
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeD'EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeÉvaluation : 4.5 sur 5 étoiles4.5/5 (10)
- Digital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosD'EverandDigital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosÉvaluation : 5 sur 5 étoiles5/5 (1)
- Laminar Flow Forced Convection in Ducts: A Source Book for Compact Heat Exchanger Analytical DataD'EverandLaminar Flow Forced Convection in Ducts: A Source Book for Compact Heat Exchanger Analytical DataPas encore d'évaluation
- Power System Control and ProtectionD'EverandPower System Control and ProtectionB. Don RussellÉvaluation : 4 sur 5 étoiles4/5 (11)
- Post Weld Heat Treatment PWHT: Standards, Procedures, Applications, and Interview Q&AD'EverandPost Weld Heat Treatment PWHT: Standards, Procedures, Applications, and Interview Q&APas encore d'évaluation