Vous aimerez peut-être aussi
- Non-Linear Vibrations of Shells: A Literature Review From 2003 To 2013Document25 pagesNon-Linear Vibrations of Shells: A Literature Review From 2003 To 2013Yazdan RastegarPas encore d'évaluation
- Chapter 9 Reference Feed Forward ControlDocument16 pagesChapter 9 Reference Feed Forward ControlJRPas encore d'évaluation
- Quercetin Ameliorates Chlorpyrifos - Induced Oxidative Stress in The Rat BrainDocument7 pagesQuercetin Ameliorates Chlorpyrifos - Induced Oxidative Stress in The Rat BrainYazdan RastegarPas encore d'évaluation
- Disturbance Observer Based Control For Nonlinear SystemsDocument5 pagesDisturbance Observer Based Control For Nonlinear SystemsYazdan RastegarPas encore d'évaluation
- Multi-Class Motor Imagery EEG Decoding For Brain-Computer InterfacesDocument13 pagesMulti-Class Motor Imagery EEG Decoding For Brain-Computer InterfacesYazdan RastegarPas encore d'évaluation
- Robust Feedback-Slides: October 2014Document15 pagesRobust Feedback-Slides: October 2014Yazdan RastegarPas encore d'évaluation
- On Vibrational Behavior of Pulse Detonation Engine TubesDocument14 pagesOn Vibrational Behavior of Pulse Detonation Engine TubesYazdan RastegarPas encore d'évaluation
- Uncertainty-Based Prioritization of Road Safety ProjectsDocument9 pagesUncertainty-Based Prioritization of Road Safety ProjectsYazdan RastegarPas encore d'évaluation
- Chaos in Nonlinear Dynamic Systems: Helicopter Vibration MechanismsDocument5 pagesChaos in Nonlinear Dynamic Systems: Helicopter Vibration MechanismsYazdan RastegarPas encore d'évaluation
- Modeling and Control of A Single Axis Tilting Quad CopterDocument6 pagesModeling and Control of A Single Axis Tilting Quad CopterYazdan RastegarPas encore d'évaluation
- Robot ARM SimulationDocument11 pagesRobot ARM SimulationBrijesh ReddyPas encore d'évaluation
- New Framework For Behavior Modeling of Organs and Soft Tissue Using The Boundary-Element MethodsDocument6 pagesNew Framework For Behavior Modeling of Organs and Soft Tissue Using The Boundary-Element MethodsYazdan RastegarPas encore d'évaluation
- Nonlinear Finite Element-Based Modeling of Soft-Tissue CuttingDocument6 pagesNonlinear Finite Element-Based Modeling of Soft-Tissue CuttingYazdan RastegarPas encore d'évaluation
- 1 s2.0 S0005109806000021 Main PDFDocument11 pages1 s2.0 S0005109806000021 Main PDFYazdan RastegarPas encore d'évaluation
- Adaptive and Robust Controls of Uncertain Systems With Nonlinear ParameterizationDocument7 pagesAdaptive and Robust Controls of Uncertain Systems With Nonlinear ParameterizationYazdan RastegarPas encore d'évaluation
- 1 s2.0 S0022460X00929869 Main PDFDocument14 pages1 s2.0 S0022460X00929869 Main PDFshashank soniPas encore d'évaluation
- Motors and ControllersDocument20 pagesMotors and ControllersYazdan RastegarPas encore d'évaluation
- Design and Control of An Active Knee Orthosis Driven by A Rotary Series Elastic ActuatorDocument12 pagesDesign and Control of An Active Knee Orthosis Driven by A Rotary Series Elastic ActuatorYazdan RastegarPas encore d'évaluation
- Robot Force ControlDocument6 pagesRobot Force ControlYazdan RastegarPas encore d'évaluation
- Global Sliding Mode ControlDocument9 pagesGlobal Sliding Mode ControlYazdan RastegarPas encore d'évaluation
- Gait Phase-Based Control For A Rotary Series Elastic Actuator Assisting The Knee JointDocument6 pagesGait Phase-Based Control For A Rotary Series Elastic Actuator Assisting The Knee JointYazdan RastegarPas encore d'évaluation
- 10.1109 Iros.2011.6094913Document5 pages10.1109 Iros.2011.6094913Yazdan RastegarPas encore d'évaluation
- Disturbance Observer-Based Control and Related Methods-An OverviewDocument13 pagesDisturbance Observer-Based Control and Related Methods-An OverviewYazdan RastegarPas encore d'évaluation
- CHAP4 DOCqDocument10 pagesCHAP4 DOCqAli DurazPas encore d'évaluation
- Notes On Control Systems 05Document11 pagesNotes On Control Systems 05Yazdan RastegarPas encore d'évaluation
- Rotary Series Elastic ActuatorDocument14 pagesRotary Series Elastic ActuatorYazdan RastegarPas encore d'évaluation
- Effects Zero Pole On System ResponseDocument4 pagesEffects Zero Pole On System Responsefancy_maskPas encore d'évaluation
- 10.1109 Iros.2011.6094913Document5 pages10.1109 Iros.2011.6094913Yazdan RastegarPas encore d'évaluation
- Stick - Slip PhenomenaDocument14 pagesStick - Slip PhenomenaYazdan RastegarPas encore d'évaluation
- Partial Differential Equations: Lecture NotesDocument205 pagesPartial Differential Equations: Lecture NotesMonica Cabria ZambranoPas encore d'évaluation
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Fuel System Non Cert Montacargas 30L-7 ListaDocument1 pageFuel System Non Cert Montacargas 30L-7 ListaJose A PerezPas encore d'évaluation
- Protection BrochureDocument20 pagesProtection Brochurewalk01Pas encore d'évaluation
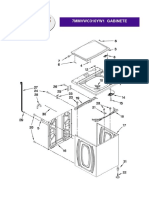
- 7MMVWC310YW11Document8 pages7MMVWC310YW11Relavson RefaccionesPas encore d'évaluation
- 603Document7 pages603jessa marie sayconPas encore d'évaluation
- A2 MECH Momentum QuestionsDocument8 pagesA2 MECH Momentum Questionsfootball_frenzy_2004Pas encore d'évaluation
- Sinamics Perfect Harmony enDocument16 pagesSinamics Perfect Harmony ensykimk8921Pas encore d'évaluation
- Ce353 CH7 PDFDocument19 pagesCe353 CH7 PDFDarlene Mae ZaraPas encore d'évaluation
- Comparision of Fabrication TolerancesDocument4 pagesComparision of Fabrication TolerancesSatish Keskar100% (1)
- Cylinder Pressure-Relief Devices: Safetygram 15Document4 pagesCylinder Pressure-Relief Devices: Safetygram 15johnPas encore d'évaluation
- Thw500 Tds (TT - 0416) EnglishDocument2 pagesThw500 Tds (TT - 0416) EnglishMasood KhanPas encore d'évaluation
- Speed Torque Gear Ratios Motor Vehicles Internal Combustion Engine Rotational Speed TorqueDocument45 pagesSpeed Torque Gear Ratios Motor Vehicles Internal Combustion Engine Rotational Speed TorqueAkshay SinghPas encore d'évaluation
- E Beam WeldingDocument2 pagesE Beam WeldingDhilip DanielPas encore d'évaluation
- Detroit Parts 8V71 & 12V71Document47 pagesDetroit Parts 8V71 & 12V71indra100% (2)
- 15780Document16 pages15780uddinnadeemPas encore d'évaluation
- PW130 7Document24 pagesPW130 7Csongor Molnár100% (1)
- BR Cat VF-W STD Eng r07 1Document268 pagesBR Cat VF-W STD Eng r07 1Brian LesliePas encore d'évaluation
- Omega PTFE Needle Valve - FVLT100Document1 pageOmega PTFE Needle Valve - FVLT100XavierPas encore d'évaluation
- Panasonic Servisni Manual SXC 9-12 KWDocument136 pagesPanasonic Servisni Manual SXC 9-12 KWzimroviPas encore d'évaluation
- sl2019 685Document3 pagessl2019 685avm4343Pas encore d'évaluation
- Copper Tube DetailsDocument6 pagesCopper Tube DetailsBhavin PatelPas encore d'évaluation
- Lecture 1 - Joining Processes-1Document9 pagesLecture 1 - Joining Processes-1Shaheer FarrukhPas encore d'évaluation
- NDT Important QuestionsDocument2 pagesNDT Important QuestionsSaffan ahmed KhanPas encore d'évaluation
- Lecture2 PDFDocument9 pagesLecture2 PDFPriyam NayakPas encore d'évaluation
- Raw Pareto Week 51Document349 pagesRaw Pareto Week 51Ahmat RamadaniPas encore d'évaluation
- Cooling System MechanicallDocument23 pagesCooling System MechanicallStuart FerreiraPas encore d'évaluation
- Mvjce Me 6 SemDocument101 pagesMvjce Me 6 SemAkash AkuPas encore d'évaluation
- Simplified Analysisof Continuous BeamsDocument8 pagesSimplified Analysisof Continuous BeamsMin Thiha NaingPas encore d'évaluation
- Cmae Prop 3Document3 pagesCmae Prop 3Mithun Kumar SandaPas encore d'évaluation
- Internship Report On Suzuki Gujranwala MotorsDocument108 pagesInternship Report On Suzuki Gujranwala MotorsAbdulrehman Butt87% (15)
- Me401A Lab Report: Experiment Number: 5 Group Number: B2Document9 pagesMe401A Lab Report: Experiment Number: 5 Group Number: B2Rishu KatiyarPas encore d'évaluation