Vous aimerez peut-être aussi
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5795)
- AsicDocument8 pagesAsicShivanshu Trivedi100% (1)
- Some Useful Linux CommandsDocument31 pagesSome Useful Linux CommandsShivanshu TrivediPas encore d'évaluation
- Rec1 8177 Fresher ApplicationFormDocument2 pagesRec1 8177 Fresher ApplicationFormLynman KyrogPas encore d'évaluation
- Press Release: क�द्र�य कायार्लय, एस.बी.एस.मागर्, मुंबई /Phone: /Fax: emailDocument2 pagesPress Release: क�द्र�य कायार्लय, एस.बी.एस.मागर्, मुंबई /Phone: /Fax: emailShivanshu TrivediPas encore d'évaluation
- VLSI Hand Written Theory Class Notes of ACE PDFDocument178 pagesVLSI Hand Written Theory Class Notes of ACE PDFRahul SrivastavaPas encore d'évaluation
- Filter DesignDocument42 pagesFilter DesignShivanshu Trivedi100% (1)
- Multirate SystemsDocument9 pagesMultirate SystemsShivanshu TrivediPas encore d'évaluation
- DSP Lab 4Document3 pagesDSP Lab 4Shivanshu TrivediPas encore d'évaluation
- Home Assignment-10: Electromagnetic Theory (EE340)Document1 pageHome Assignment-10: Electromagnetic Theory (EE340)shivanshu100% (1)
- NETWORK THEORY Hand Written Theory Notes of ACE PDFDocument336 pagesNETWORK THEORY Hand Written Theory Notes of ACE PDFShivanshu TrivediPas encore d'évaluation
- Introduction To Signal Processing: Iasonas Kokkinos Ecole Centrale ParisDocument32 pagesIntroduction To Signal Processing: Iasonas Kokkinos Ecole Centrale ParisShivanshu TrivediPas encore d'évaluation
- Intro To Advanced DSPDocument49 pagesIntro To Advanced DSPShivanshu TrivediPas encore d'évaluation
- Lec - 1 DICDDocument27 pagesLec - 1 DICDShivanshu TrivediPas encore d'évaluation
- AdcsfDocument28 pagesAdcsfShivanshu TrivediPas encore d'évaluation
- Power Electronics: Faculty-In-Charge: Dr. Sitangshu BhattacharyaDocument27 pagesPower Electronics: Faculty-In-Charge: Dr. Sitangshu BhattacharyaShivanshu TrivediPas encore d'évaluation
- Assembly Language, Models of Computation: 6.004x Computation Structures Part 2 - Computer ArchitectureDocument30 pagesAssembly Language, Models of Computation: 6.004x Computation Structures Part 2 - Computer ArchitectureShivanshu TrivediPas encore d'évaluation
- Consumer and Producer SurplusDocument39 pagesConsumer and Producer SurplusShivanshu TrivediPas encore d'évaluation
- RC-RL and LC FiltersDocument9 pagesRC-RL and LC FiltersShivanshu TrivediPas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- 001 2012 4 b-3Document114 pages001 2012 4 b-3dikahunguPas encore d'évaluation
- Toner - On SubstanceDocument24 pagesToner - On Substancephilip_costa_2Pas encore d'évaluation
- 1st en 10 Reflexive & Intensive PronounDocument2 pages1st en 10 Reflexive & Intensive Pronounmavlazaro.1995Pas encore d'évaluation
- Sample Eligibility FormsDocument26 pagesSample Eligibility Formsapi-241173571100% (1)
- Test Bank For Supervision Concepts and Skill Building 7th Edition CertoDocument18 pagesTest Bank For Supervision Concepts and Skill Building 7th Edition CertoShamika Bejaran100% (22)
- RAWS Lecture ReviewerDocument7 pagesRAWS Lecture ReviewerVera Catrina OrtegaPas encore d'évaluation
- American Stories "The Murders in The Rue Morgue," Part One by Edgar Allan PoeDocument17 pagesAmerican Stories "The Murders in The Rue Morgue," Part One by Edgar Allan PoeRonald MateoPas encore d'évaluation
- A Survey On Multiclass Image Classification Based On Inception-V3 Transfer Learning ModelDocument6 pagesA Survey On Multiclass Image Classification Based On Inception-V3 Transfer Learning ModelIJRASETPublicationsPas encore d'évaluation
- Management Information SystemDocument33 pagesManagement Information SystemDullStar MOTOPas encore d'évaluation
- Field Study EssayDocument3 pagesField Study EssayAdellee Sinajon100% (1)
- English Grammar in Context - AdvancedDocument241 pagesEnglish Grammar in Context - AdvancedAldi PobletePas encore d'évaluation
- Introduction To Research: Research Methodology Dr. Nimit ChowdharyDocument29 pagesIntroduction To Research: Research Methodology Dr. Nimit ChowdharyDr. Nimit ChowdharyPas encore d'évaluation
- Basic Needs Checklist For DepressionDocument2 pagesBasic Needs Checklist For DepressionFernandoSuarez100% (1)
- Hermeneutical Phenomenology11Document11 pagesHermeneutical Phenomenology11Jian Ventura100% (1)
- Recognized by The Government I Founded 1928 I Candelaria, QuezonDocument2 pagesRecognized by The Government I Founded 1928 I Candelaria, QuezonOccasus DeirdrePas encore d'évaluation
- Communication Theory Group Presentation - How People Construct MeaningDocument44 pagesCommunication Theory Group Presentation - How People Construct MeaningSummer BiggsPas encore d'évaluation
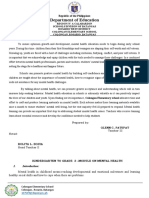
- Mental Health Activities For LearnersDocument17 pagesMental Health Activities For LearnersGlenn PatupatPas encore d'évaluation
- True Colors OutlineDocument2 pagesTrue Colors Outlineapi-305242503Pas encore d'évaluation
- Reviewer Technical Writing Lec 3Document28 pagesReviewer Technical Writing Lec 3Yani FranzPas encore d'évaluation
- Mental Health and WellDocument9 pagesMental Health and WellJohn rex QuintayoPas encore d'évaluation
- CI-Friendly Reading StrategiesDocument25 pagesCI-Friendly Reading StrategiesIELTS Council100% (1)
- Writing A Reaction PaperDocument6 pagesWriting A Reaction PaperniqqaPas encore d'évaluation
- Needs Analysis Questionnaire - EnglishDocument8 pagesNeeds Analysis Questionnaire - EnglishBeatrice BacalbasaPas encore d'évaluation
- Case Studies in Organizational Communication Prepared by Steve May, University of North Carolina, Chapel Hill 2003Document11 pagesCase Studies in Organizational Communication Prepared by Steve May, University of North Carolina, Chapel Hill 2003rahulgaurav123Pas encore d'évaluation
- Psychosis and Spirituality: Isabel ClarkeDocument39 pagesPsychosis and Spirituality: Isabel ClarkeGriselMartinezPas encore d'évaluation
- Understand The Principles and Theories of Management Information System (MIS) and Its Impact On OrganizationsDocument11 pagesUnderstand The Principles and Theories of Management Information System (MIS) and Its Impact On Organizationskaleb Deneke100% (1)
- Violi 2012Document40 pagesVioli 2012Rodrigo SuárezPas encore d'évaluation
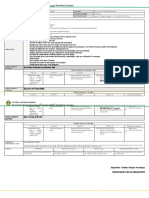
- RPH SN DLP THN 4 NEW (Unit 4)Document10 pagesRPH SN DLP THN 4 NEW (Unit 4)Charles BayangPas encore d'évaluation
- Behavior Intervention Plan: This FormDocument5 pagesBehavior Intervention Plan: This Formapi-417841679Pas encore d'évaluation
- Lotus Species Classification Using Transfer Learning Based On VGG16, ResNet152V2, and MobileNetV2Document9 pagesLotus Species Classification Using Transfer Learning Based On VGG16, ResNet152V2, and MobileNetV2IAES IJAIPas encore d'évaluation