Vous aimerez peut-être aussi
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- SuccessFactors Calibration - BitpipeDocument6 pagesSuccessFactors Calibration - BitpipeSenthil KumarPas encore d'évaluation
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Flow Metering Tutorial Part 4 Ultrasonic Flow MetersDocument4 pagesFlow Metering Tutorial Part 4 Ultrasonic Flow MetersSenthil KumarPas encore d'évaluation
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- DO 178B DetailedDocument25 pagesDO 178B DetailedSenthil KumarPas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Take Home Salary Calculator IndiaDocument1 pageTake Home Salary Calculator IndiaSenthil KumarPas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- DXL Reference ManualDocument892 pagesDXL Reference ManualSenthil KumarPas encore d'évaluation
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- DXL Reference ManualDocument892 pagesDXL Reference ManualSenthil KumarPas encore d'évaluation
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Aircraft A330 Maintenance SystemDocument23 pagesAircraft A330 Maintenance SystemMUSSA100% (7)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- S2 N Ku NOn 14 C TCOg 9Document5 pagesS2 N Ku NOn 14 C TCOg 9Senthil KumarPas encore d'évaluation
- Aircraft MaintenanceDocument207 pagesAircraft MaintenanceSenthil Kumar100% (1)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- By: Eric Spoor: Information in This Section Was Taken FromDocument18 pagesBy: Eric Spoor: Information in This Section Was Taken FromSenthil KumarPas encore d'évaluation
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Questions On Measurement of Inductance and CapacitanceDocument49 pagesQuestions On Measurement of Inductance and Capacitancekibrom atsbha0% (1)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Adaptadores ElecDocument74 pagesAdaptadores ElecGUILLERMO SEGURAPas encore d'évaluation
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Sti Pav 4 ComplianceDocument7 pagesSti Pav 4 ComplianceDaniel AndoziaPas encore d'évaluation
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- Jitter FundamentalsDocument5 pagesJitter FundamentalsAmbrish TiwariPas encore d'évaluation
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- SM PDF Chapter14 PDFDocument37 pagesSM PDF Chapter14 PDFsuryapmohantyPas encore d'évaluation
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Class Viii Sound Text Book Question Answers-SumaDocument4 pagesClass Viii Sound Text Book Question Answers-SumaRAYAN ISWKPas encore d'évaluation
- PhysicsDocument2 pagesPhysicsaliyanmuhammad840Pas encore d'évaluation
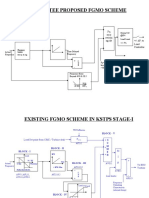
- Cea Committee Proposed Fgmo Scheme: Fq error switchi ng ckt +/-ΔP to Load ControllerDocument6 pagesCea Committee Proposed Fgmo Scheme: Fq error switchi ng ckt +/-ΔP to Load ControllersrinuvoodiPas encore d'évaluation
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Basic Terminology in VibrationsDocument10 pagesBasic Terminology in VibrationsJuhi Singh100% (1)
- Handbook For Industrial Noise: ControlDocument148 pagesHandbook For Industrial Noise: ControlpraphasPas encore d'évaluation
- SS - FTS - 68 (Online) - (Main) C - 2021-06-09 - 2020 - QDocument11 pagesSS - FTS - 68 (Online) - (Main) C - 2021-06-09 - 2020 - QjioPas encore d'évaluation
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- Icest 2011 977 930Document8 pagesIcest 2011 977 93001666754614Pas encore d'évaluation
- Vibration Analysis of Power Transformers: January 2013Document7 pagesVibration Analysis of Power Transformers: January 2013Luiz CallegariPas encore d'évaluation
- Non Destructive TestingDocument182 pagesNon Destructive TestingAravindPas encore d'évaluation
- Timers Tutorial PDFDocument19 pagesTimers Tutorial PDFresonantFractalPas encore d'évaluation
- 1.1.3 SoundDocument10 pages1.1.3 SoundAhsan WaheedPas encore d'évaluation
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Test 13Document46 pagesTest 13amanazim404Pas encore d'évaluation
- Certificate: Technical University, Lucknow Under My Supervision. The Project Embodies ResultDocument11 pagesCertificate: Technical University, Lucknow Under My Supervision. The Project Embodies ResultSumit ChauhanPas encore d'évaluation
- Module#2 Assignment - Mendoza, Oliver RDocument17 pagesModule#2 Assignment - Mendoza, Oliver ROliver MendozaPas encore d'évaluation
- Vibration Analysis of Gear Box.5-MilosprokoDocument3 pagesVibration Analysis of Gear Box.5-MilosprokoRavikiran Hegde100% (2)
- Balance and Vibration - Webinar - AMCA - v1Document85 pagesBalance and Vibration - Webinar - AMCA - v1Malcom FredrickPas encore d'évaluation
- Wave On A StringDocument25 pagesWave On A StringgokulPas encore d'évaluation
- Lecture No.17. Auditory or Acoustic Communication in Insects PDFDocument2 pagesLecture No.17. Auditory or Acoustic Communication in Insects PDFmuhammad hassanPas encore d'évaluation
- Week 17 PT2 CompilationDocument27 pagesWeek 17 PT2 CompilationKenberly DinglePas encore d'évaluation
- TOPCON GTS-100N - Repair Manual PDFDocument191 pagesTOPCON GTS-100N - Repair Manual PDFMolfortPas encore d'évaluation
- A Summary of Sound Therapy and Vibrational Healing ConceptsDocument52 pagesA Summary of Sound Therapy and Vibrational Healing ConceptsFrank Pasta100% (6)
- Music Theory EssentialsDocument133 pagesMusic Theory EssentialsGreen Wood100% (6)
- Foucault's Method in New Settings: September 2014Document10 pagesFoucault's Method in New Settings: September 2014anie bragaPas encore d'évaluation
- Self Balancing Robot PDFDocument12 pagesSelf Balancing Robot PDFVickey VigneshPas encore d'évaluation
- Simple Harmonic MotionDocument7 pagesSimple Harmonic Motionbishu_iitPas encore d'évaluation
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)