Vous aimerez peut-être aussi
- Some Useful Linux CommandsDocument31 pagesSome Useful Linux CommandsShivanshu TrivediPas encore d'évaluation
- Press Release: क�द्र�य कायार्लय, एस.बी.एस.मागर्, मुंबई /Phone: /Fax: emailDocument2 pagesPress Release: क�द्र�य कायार्लय, एस.बी.एस.मागर्, मुंबई /Phone: /Fax: emailShivanshu TrivediPas encore d'évaluation
- AsicDocument8 pagesAsicShivanshu Trivedi100% (1)
- Filter DesignDocument42 pagesFilter DesignShivanshu Trivedi100% (1)
- Rec1 8177 Fresher ApplicationFormDocument2 pagesRec1 8177 Fresher ApplicationFormLynman KyrogPas encore d'évaluation
- Some Useful Linux CommandsDocument31 pagesSome Useful Linux CommandsShivanshu TrivediPas encore d'évaluation
- VLSI System DesignDocument6 pagesVLSI System DesignbigfatdashPas encore d'évaluation
- VLSI Hand Written Theory Class Notes of ACE PDFDocument178 pagesVLSI Hand Written Theory Class Notes of ACE PDFRahul SrivastavaPas encore d'évaluation
- GKP List Psu PDFDocument2 pagesGKP List Psu PDFShivanshu TrivediPas encore d'évaluation
- Intro To Other Important Aspects of DSPDocument44 pagesIntro To Other Important Aspects of DSPShivanshu TrivediPas encore d'évaluation
- Multirate SystemsDocument9 pagesMultirate SystemsShivanshu TrivediPas encore d'évaluation
- Intro To Advanced DSPDocument49 pagesIntro To Advanced DSPShivanshu TrivediPas encore d'évaluation
- Intro To Other Important Aspects of DSPDocument44 pagesIntro To Other Important Aspects of DSPShivanshu TrivediPas encore d'évaluation
- Static Timing AnalysisDocument71 pagesStatic Timing Analysisapi-3762689100% (13)
- NETWORK THEORY Hand Written Theory Notes of ACE PDFDocument336 pagesNETWORK THEORY Hand Written Theory Notes of ACE PDFShivanshu TrivediPas encore d'évaluation
- Home Assignment-10: Electromagnetic Theory (EE340)Document1 pageHome Assignment-10: Electromagnetic Theory (EE340)shivanshu100% (1)
- Walmart Registered StudentsDocument2 pagesWalmart Registered StudentsShivanshu TrivediPas encore d'évaluation
- IIITA - Fee Schedule & Structure For Jul-Dec-16 PDFDocument4 pagesIIITA - Fee Schedule & Structure For Jul-Dec-16 PDFShivanshu TrivediPas encore d'évaluation
- Signals FFTDocument66 pagesSignals FFTAbhishek VermaPas encore d'évaluation
- DSP Lab 4Document3 pagesDSP Lab 4Shivanshu TrivediPas encore d'évaluation
- Consumer and Producer SurplusDocument39 pagesConsumer and Producer SurplusShivanshu TrivediPas encore d'évaluation
- Lec - 1 DICDDocument27 pagesLec - 1 DICDShivanshu TrivediPas encore d'évaluation
- Lec - 2 Power ElectronicsDocument55 pagesLec - 2 Power ElectronicsShivanshu TrivediPas encore d'évaluation
- NUMERICAL METHODS (Gate2016.info) PDFDocument60 pagesNUMERICAL METHODS (Gate2016.info) PDFShivanshu TrivediPas encore d'évaluation
- Lec - 1 DICDDocument27 pagesLec - 1 DICDShivanshu TrivediPas encore d'évaluation
- Edsp632 DSP Intro l1Document33 pagesEdsp632 DSP Intro l1Shivanshu TrivediPas encore d'évaluation
- HDocument32 pagesHShivanshu TrivediPas encore d'évaluation
- AdcsfDocument28 pagesAdcsfShivanshu TrivediPas encore d'évaluation
- Power Electronics: Faculty-In-Charge: Dr. Sitangshu BhattacharyaDocument27 pagesPower Electronics: Faculty-In-Charge: Dr. Sitangshu BhattacharyaShivanshu TrivediPas encore d'évaluation
- Assignment 3Document3 pagesAssignment 3Shivanshu TrivediPas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5784)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (890)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (72)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Bluetooth ArchitectureDocument29 pagesBluetooth Architecturellqa001Pas encore d'évaluation
- GROUND Co.'s Lightning Protection Solution for Digital SystemsDocument3 pagesGROUND Co.'s Lightning Protection Solution for Digital SystemsJohanPas encore d'évaluation
- Choose The Right Data Converter For Your ApplicationDocument78 pagesChoose The Right Data Converter For Your ApplicationAnonymous 3mJfZEPas encore d'évaluation
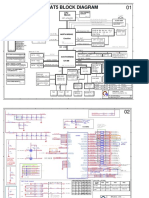
- At5 Block Diagram: CPU MeromDocument49 pagesAt5 Block Diagram: CPU MeromPaxOtiumPas encore d'évaluation
- Assignment of ARM ProcessorDocument5 pagesAssignment of ARM ProcessorRahi Sarkar100% (2)
- User Manual RadWin 1000Document124 pagesUser Manual RadWin 1000Jairson Gomez BolañosPas encore d'évaluation
- FOX515: NEW Modules: V SYNUF With SFP: STM-1 Module, Replacing SYNIFDocument21 pagesFOX515: NEW Modules: V SYNUF With SFP: STM-1 Module, Replacing SYNIFHuynh NguyetPas encore d'évaluation
- A 3.0GHz 13.8GHz Ultra-Wideband Planar Monopole Micro Strip Antenna. Proceedings of 2014 3rd Asia-Pacific Conference On Antennas and Propagation PDFDocument3 pagesA 3.0GHz 13.8GHz Ultra-Wideband Planar Monopole Micro Strip Antenna. Proceedings of 2014 3rd Asia-Pacific Conference On Antennas and Propagation PDFNiko RohadiPas encore d'évaluation
- PV 500eco2Document1 pagePV 500eco2Marcelo MachadoPas encore d'évaluation
- Ultrasonic Distance MeterDocument27 pagesUltrasonic Distance Meteraashishagarwall100% (2)
- tk-2000 Service Manual PDFDocument32 pagestk-2000 Service Manual PDFJose VillalobosPas encore d'évaluation
- TCP IpDocument64 pagesTCP IpMohamed ShabanaPas encore d'évaluation
- Cadence MixerDocument118 pagesCadence MixerVăn Công100% (1)
- Femtocell Deployment Guide: An Operator-Focused Strategy For A Successful Femtocell RolloutDocument16 pagesFemtocell Deployment Guide: An Operator-Focused Strategy For A Successful Femtocell Rolloutradoslav balevPas encore d'évaluation
- Kyambogo University: Group: Next LevelDocument27 pagesKyambogo University: Group: Next LevelAthiyo MartinPas encore d'évaluation
- Tcad Omni License: All Tools, One License, Flat FeeDocument4 pagesTcad Omni License: All Tools, One License, Flat FeesaifuddinPas encore d'évaluation
- Datasheet - XPG SPECTRIX S40G - EN - 20191224Document2 pagesDatasheet - XPG SPECTRIX S40G - EN - 20191224jozielsonPas encore d'évaluation
- Wiring Diagram Details for Multiple Display ConnectorsDocument5 pagesWiring Diagram Details for Multiple Display ConnectorsFernando CoutoPas encore d'évaluation
- Zap Pica ToreDocument1 pageZap Pica TorechicanahenoPas encore d'évaluation
- Toshiba Field Effect Transistor for Audio and High Voltage AmplifiersDocument4 pagesToshiba Field Effect Transistor for Audio and High Voltage Amplifiersmohammed elmobasherPas encore d'évaluation
- Fifth Semester B.Tech Degree Examination: Answer All QuestionsDocument3 pagesFifth Semester B.Tech Degree Examination: Answer All Questionsrajkiran_rajPas encore d'évaluation
- UNNPX206R3Document4 pagesUNNPX206R3David OlayaPas encore d'évaluation
- ICT 1101 - PC HARDWARE AND COMPONENTSDocument24 pagesICT 1101 - PC HARDWARE AND COMPONENTSyvan dollarsPas encore d'évaluation
- PrimeTime PowerAnalysisPXDocument168 pagesPrimeTime PowerAnalysisPXAgnathavasiPas encore d'évaluation
- 741 328Document2 pages741 328slymnPas encore d'évaluation
- HX432C16FB3/16 HX432C16FB3/16: Memory Module SpecificationsDocument2 pagesHX432C16FB3/16 HX432C16FB3/16: Memory Module SpecificationsSaro RootPas encore d'évaluation
- AE - 4.3 Op-Amp AC CharacteristicsDocument28 pagesAE - 4.3 Op-Amp AC CharacteristicsBhoomi GuptaPas encore d'évaluation
- 9100 RS485Document2 pages9100 RS485andicahPas encore d'évaluation
- Electronic Compass Design Using KMZ51 and KMZ52Document38 pagesElectronic Compass Design Using KMZ51 and KMZ52Humphreylin100% (1)
- Multiservice Tactical Satellite Interception System DatasheetDocument3 pagesMultiservice Tactical Satellite Interception System Datasheetf7gzdydmz6Pas encore d'évaluation