Vous aimerez peut-être aussi
- Libro de Sensores AutomotricesDocument118 pagesLibro de Sensores Automotricesmarcano3593% (44)
- Medición de longitudes: Libro de consulta acerca de los procedimientos de medición en fabricaciónD'EverandMedición de longitudes: Libro de consulta acerca de los procedimientos de medición en fabricaciónÉvaluation : 4 sur 5 étoiles4/5 (1)
- Mantenimiento del sistema de alumbrado y señalización. TMVG0209D'EverandMantenimiento del sistema de alumbrado y señalización. TMVG0209Pas encore d'évaluation
- UF1670 - Reparación de equipos mecánicos y eléctricos de plantas de tratamiento de agua y plantas depuradorasD'EverandUF1670 - Reparación de equipos mecánicos y eléctricos de plantas de tratamiento de agua y plantas depuradorasÉvaluation : 5 sur 5 étoiles5/5 (1)
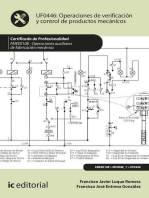
- Operaciones de verificación y control de productos mecánicos. FMEE0108D'EverandOperaciones de verificación y control de productos mecánicos. FMEE0108Pas encore d'évaluation
- Libro de Sensores AutomotricesDocument118 pagesLibro de Sensores AutomotricesJose GarciaPas encore d'évaluation
- Calibradores de CarátulaDocument11 pagesCalibradores de Carátulafut22100% (6)
- Métodos de trabajo y utilización de aparatos, equipos y útiles topográficos. AGAJ0308D'EverandMétodos de trabajo y utilización de aparatos, equipos y útiles topográficos. AGAJ0308Pas encore d'évaluation
- Interpretación de mapas y planos topográficos y dibujo de planos sencillos. AGAJ0308D'EverandInterpretación de mapas y planos topográficos y dibujo de planos sencillos. AGAJ0308Pas encore d'évaluation
- UF1966 - Operaciones auxiliares en el mantenimiento de equipos electrónicosD'EverandUF1966 - Operaciones auxiliares en el mantenimiento de equipos electrónicosÉvaluation : 5 sur 5 étoiles5/5 (1)
- Curso Alienador LaserDocument49 pagesCurso Alienador LaserpabloPas encore d'évaluation
- Mantenimiento de redes eléctricas aéreas de baja tensión. ELEE0109D'EverandMantenimiento de redes eléctricas aéreas de baja tensión. ELEE0109Pas encore d'évaluation
- Tarea 1Document11 pagesTarea 1ELIAN EDMUNDO ARENAS YATACOPas encore d'évaluation
- Operación Y Uso Del Amperímetro de GanchoDocument25 pagesOperación Y Uso Del Amperímetro de GanchoFrancisco Hernandez25% (4)
- Sensores para Análisis de VibracionesDocument32 pagesSensores para Análisis de VibracionesCELIMAR ALVAREZ GPas encore d'évaluation
- Realización de trabajos de agrimensura, nivelación simple y replanteo. AGAJ0308D'EverandRealización de trabajos de agrimensura, nivelación simple y replanteo. AGAJ0308Pas encore d'évaluation
- Media Tensión Redes EléctricasDocument110 pagesMedia Tensión Redes EléctricasRonald BeltránPas encore d'évaluation
- Resolvers y TacómetroDocument13 pagesResolvers y TacómetroMariluz YipPas encore d'évaluation
- Curso LOGICA CABLEADADocument62 pagesCurso LOGICA CABLEADAdario basualdoPas encore d'évaluation
- Tablas Cables AcsrDocument25 pagesTablas Cables AcsrKeibi Jose Ortuño Linares100% (1)
- Equipos Analogicos - MedicionesDocument17 pagesEquipos Analogicos - MedicionesAndrés DamiánPas encore d'évaluation
- 13 - Metrología ElectrónicaDocument7 pages13 - Metrología ElectrónicaRamiro Di PintoPas encore d'évaluation
- Reloj or de CaratulaDocument7 pagesReloj or de CaratulaadruagarciaPas encore d'évaluation
- Informe OsciloscopioDocument12 pagesInforme OsciloscopioLuna DryPas encore d'évaluation
- Centro Universitario Siglo XXI: Ing. Industrial MetrologíaDocument10 pagesCentro Universitario Siglo XXI: Ing. Industrial MetrologíaDiego Armando Sotto RiveraPas encore d'évaluation
- Isntrumentos Del AvionDocument6 pagesIsntrumentos Del Avionluna1041Pas encore d'évaluation
- Estacion TotalDocument7 pagesEstacion TotalCristian CernaPas encore d'évaluation
- Monografia de NivelesDocument14 pagesMonografia de NivelesMark CH0% (1)
- Cuestionario Previo 3Document5 pagesCuestionario Previo 3Ricardo fuchsPas encore d'évaluation
- Informe Previo N° 1 Circuitos Electronicos 1 ParettoDocument8 pagesInforme Previo N° 1 Circuitos Electronicos 1 ParettoWalter Tarmeño NoriegaPas encore d'évaluation
- Fuerzay Par ControlDocument13 pagesFuerzay Par ControlAndrea Carolina DiazPas encore d'évaluation
- Comparador de AlturasDocument11 pagesComparador de AlturasCarlos Arturo Guerrero MeunierPas encore d'évaluation
- Sensores de PosiciónDocument22 pagesSensores de PosiciónJOSE MANUEL PERALTILLA ARANAPas encore d'évaluation
- Parcial Mediciones VALDESDocument4 pagesParcial Mediciones VALDESRicky RiveroPas encore d'évaluation
- CURSO OPTALIGN SMART Enarsa B. LopezDocument49 pagesCURSO OPTALIGN SMART Enarsa B. LopezMarcelo de los SANTOSPas encore d'évaluation
- Lab de Circuitos #2Document27 pagesLab de Circuitos #2SANTIAGO ALFONSO MEDINA PEREZPas encore d'évaluation
- Practicas de LabDocument56 pagesPracticas de Labviviana almeidaPas encore d'évaluation
- Comparador de CaratulaDocument14 pagesComparador de CaratularmidoriadilenePas encore d'évaluation
- Laboratorios de Metrologia ElectricaDocument49 pagesLaboratorios de Metrologia ElectricaAntero SicllaPas encore d'évaluation
- Practica 8 Sensores y ActDocument13 pagesPractica 8 Sensores y ActCésar CastañedaPas encore d'évaluation
- Comparador de Carátula INVDocument9 pagesComparador de Carátula INVDaniel Roberto Navarro GutierrezPas encore d'évaluation
- Sensores de VelocidadDocument54 pagesSensores de VelocidadJulio Bit IxcameyPas encore d'évaluation
- Informe 4 PotenciometroDocument8 pagesInforme 4 PotenciometroLuis CuasquePas encore d'évaluation
- Marco TeóricoDocument8 pagesMarco TeóricoJuan Ramon Verdin SerranoPas encore d'évaluation
- Resumen Cap 1-10creusDocument27 pagesResumen Cap 1-10creusErick David0% (1)
- Material Apoyo AutomatizacionDocument18 pagesMaterial Apoyo AutomatizacionFelipe GonzalezzPas encore d'évaluation
- Practica #2Document17 pagesPractica #2Jooni QuirozPas encore d'évaluation
- 4.1. Sensores y TransductoresDocument34 pages4.1. Sensores y Transductoreschocky22Pas encore d'évaluation
- Sensores InstrumentacionDocument11 pagesSensores InstrumentacionMISAEL ESTEBAN ARCE LOPEZPas encore d'évaluation
- Practica No.2Parcial IIDocument25 pagesPractica No.2Parcial IIAdrian AlayPas encore d'évaluation
- Trabajo Final SensoresDocument17 pagesTrabajo Final SensoresMary VasquezPas encore d'évaluation
- OsciloscopiosDocument27 pagesOsciloscopiosdanielPas encore d'évaluation
- Metro Practica3Document8 pagesMetro Practica3Victoria gomezPas encore d'évaluation
- Unidad N°2 - MetrologiaDocument31 pagesUnidad N°2 - MetrologiaGustavo VercellonePas encore d'évaluation
- Laboratorio 3 InstrumentacionDocument7 pagesLaboratorio 3 InstrumentacionEduitar RodriguezPas encore d'évaluation
- Laboratorio 1 EltDocument8 pagesLaboratorio 1 EltCristina Tapia HuancaPas encore d'évaluation
- ¿Qué Es Un Sensor?Document6 pages¿Qué Es Un Sensor?Manuel Andres Vargas AbastoPas encore d'évaluation
- 7 Oficina TécnicaDocument25 pages7 Oficina TécnicaFernando Santamaría FernándezPas encore d'évaluation
- Trabajo2 de NetzahualcoyoltDocument27 pagesTrabajo2 de NetzahualcoyoltEliu martinezPas encore d'évaluation
- Filtro adaptativo: Mejora de la visión por computadora mediante filtrado adaptativoD'EverandFiltro adaptativo: Mejora de la visión por computadora mediante filtrado adaptativoPas encore d'évaluation
- Iso 14000Document15 pagesIso 14000Fran LMPas encore d'évaluation
- Pil OnesDocument6 pagesPil OnesFran LMPas encore d'évaluation
- Método KJ Kawakita JiroDocument13 pagesMétodo KJ Kawakita JiroFran LM0% (1)
- Reglamento de La Ley de Aviacion CivilDocument12 pagesReglamento de La Ley de Aviacion CivilFran LMPas encore d'évaluation
- Deflexión de Vigas y EjesDocument5 pagesDeflexión de Vigas y EjesFran LMPas encore d'évaluation
- Bien Carga y Descarga de CapasitoresDocument10 pagesBien Carga y Descarga de CapasitoresAlexis CastroPas encore d'évaluation
- Guia Practicas Unidad 2. Instalaciones ElectricasDocument3 pagesGuia Practicas Unidad 2. Instalaciones ElectricasEnrique Nuñez del PradoPas encore d'évaluation
- ¿Qué Es El Factor de Potencia de Una Instalación Eléctrica?Document3 pages¿Qué Es El Factor de Potencia de Una Instalación Eléctrica?ALVARO BARRERAPas encore d'évaluation
- Capacidades FísicasDocument1 pageCapacidades FísicasAxel Israel García RodríguezPas encore d'évaluation
- Informe N1Document3 pagesInforme N1Alejandro CárdenasPas encore d'évaluation
- Manual Flexpak3000Document220 pagesManual Flexpak3000Leonardo Vinicio Olarte CarrilloPas encore d'évaluation
- Presentación Transformador de PotenciaDocument13 pagesPresentación Transformador de PotenciaJose Arley Arias CarreteroPas encore d'évaluation
- Tecnologia Vocacional I (4to Electronic A)Document87 pagesTecnologia Vocacional I (4to Electronic A)oramnbetaPas encore d'évaluation
- AyrtonDocument9 pagesAyrtonAyrton Torres BarretoPas encore d'évaluation
- Material Unidad IIDocument23 pagesMaterial Unidad IICarlos CanteroPas encore d'évaluation
- LABORATORIO #4 Mecanica Colisiones en Dos DimensionesDocument19 pagesLABORATORIO #4 Mecanica Colisiones en Dos DimensionesdinamicoboysPas encore d'évaluation
- Ejercicios Ley de Ohm y ConductoresDocument3 pagesEjercicios Ley de Ohm y ConductoresGabrielPas encore d'évaluation
- Infografia Conocimiento y Modernidad Ilustrado Azul NaranjaDocument5 pagesInfografia Conocimiento y Modernidad Ilustrado Azul NaranjaJesus Enrique CAPas encore d'évaluation
- Guia Trabajo Energía JoseLuisDocument10 pagesGuia Trabajo Energía JoseLuisMariaPas encore d'évaluation
- Definición Del Sonido AcusticoDocument8 pagesDefinición Del Sonido AcusticoChechi RaczkoskiPas encore d'évaluation
- Efecto DopplerDocument3 pagesEfecto DopplerdmitryvxPas encore d'évaluation
- Práctica #7Document2 pagesPráctica #7khaterine Quispe CalcinaPas encore d'évaluation
- TEXTO. Arranque de Motores y Armado de Tableros.-1Document25 pagesTEXTO. Arranque de Motores y Armado de Tableros.-1Eddy Terceros PanozoPas encore d'évaluation
- Investigación de DiodosDocument15 pagesInvestigación de DiodosGuillermo MendietaPas encore d'évaluation
- Resistencia de Materiales Torsión y Esfuerzo en Vigas.Document63 pagesResistencia de Materiales Torsión y Esfuerzo en Vigas.Jose YonerPas encore d'évaluation
- EV8 - Taller de Sistemas EléctricosDocument5 pagesEV8 - Taller de Sistemas EléctricosleidiPas encore d'évaluation
- Resistenca de Materiales I Transmisión de Potencia PDFDocument15 pagesResistenca de Materiales I Transmisión de Potencia PDFManuel FloresPas encore d'évaluation
- Trabajo de Física Segunda Parte 1bguDocument3 pagesTrabajo de Física Segunda Parte 1bguJose LuisPas encore d'évaluation
- Ley de OhmDocument4 pagesLey de OhmCRISTIAN ALEJANDRO VEGA CRUZPas encore d'évaluation
- Fisica - Guía No. 13Document3 pagesFisica - Guía No. 13Moises RosalesPas encore d'évaluation
- Curva de MagnetizaciónDocument9 pagesCurva de MagnetizaciónMario ClairguePas encore d'évaluation