Vous aimerez peut-être aussi
- Control de movimiento en manufactura. Automatización CNC fundamentos de diseño y modelamiento experimentalD'EverandControl de movimiento en manufactura. Automatización CNC fundamentos de diseño y modelamiento experimentalÉvaluation : 5 sur 5 étoiles5/5 (4)
- Robot Aplicado A Manufactura 5.1 Robot en El Manejo de MaterialesDocument10 pagesRobot Aplicado A Manufactura 5.1 Robot en El Manejo de MaterialesLeticia Salinas MataPas encore d'évaluation
- Montaje y puesta en marcha de sistemas robóticos y sistemas de visión, en bienes de equipo y maquinaria industrial. FMEE0208D'EverandMontaje y puesta en marcha de sistemas robóticos y sistemas de visión, en bienes de equipo y maquinaria industrial. FMEE0208Évaluation : 3 sur 5 étoiles3/5 (1)
- Aplicaciónes de La RobóticaDocument14 pagesAplicaciónes de La RobóticaJorge Armando Uicab CanulPas encore d'évaluation
- Comprobar pesadora: Revolucionando el control de calidad con la visión por computadoraD'EverandComprobar pesadora: Revolucionando el control de calidad con la visión por computadoraPas encore d'évaluation
- 1.5 AplicacionesDocument19 pages1.5 AplicacionesErick Perez PalaciosPas encore d'évaluation
- Introduccion A La RoboticaDocument5 pagesIntroduccion A La RoboticaGanimedes EstelarPas encore d'évaluation
- Procesos auxiliares de fabricación en el mecanizado por corte y conformado. FMEH0209D'EverandProcesos auxiliares de fabricación en el mecanizado por corte y conformado. FMEH0209Pas encore d'évaluation
- Aplicaciones de La RoboticaDocument8 pagesAplicaciones de La RoboticaMilton GarciaPas encore d'évaluation
- Actividad 1. Propuesta de ProyectoDocument4 pagesActividad 1. Propuesta de ProyectoCarlos PortilloPas encore d'évaluation
- La Carga y Descarga de MáquinasDocument2 pagesLa Carga y Descarga de MáquinasValentín García100% (1)
- Sistema Electroneumático - Grupo 3 (W)Document16 pagesSistema Electroneumático - Grupo 3 (W)Ramos JoséPas encore d'évaluation
- Investigacion ManipuladoresDocument6 pagesInvestigacion ManipuladoresenocPas encore d'évaluation
- Modelos de Robots en El MercadoDocument4 pagesModelos de Robots en El Mercadocarlos xdxdPas encore d'évaluation
- Almacenes Robotizados.Document7 pagesAlmacenes Robotizados.raulPas encore d'évaluation
- Robot CilíndricoDocument2 pagesRobot Cilíndricofernando0% (1)
- Automatizacion Pintura PFC PDFDocument213 pagesAutomatizacion Pintura PFC PDFenfrecuencia100% (1)
- Robotica IndustrialDocument31 pagesRobotica IndustrialDanielAlamoPas encore d'évaluation
- Lineas de Produccion PDFDocument71 pagesLineas de Produccion PDFMartin PedrozaPas encore d'évaluation
- Estrategias de AutomatizacionDocument43 pagesEstrategias de AutomatizacionPako Nuñez100% (2)
- Gestion de Almacenes Automaticos.Document11 pagesGestion de Almacenes Automaticos.raulPas encore d'évaluation
- Uso de Robots en ManufacturaDocument5 pagesUso de Robots en ManufacturaDavid Olvera BahenaPas encore d'évaluation
- Fase 6Document16 pagesFase 6carolina pereiraPas encore d'évaluation
- Lineas de ProducciónDocument14 pagesLineas de ProducciónAlbert David RengifoPas encore d'évaluation
- T4.6 W Robots en Producción AutomatizadaDocument23 pagesT4.6 W Robots en Producción Automatizadadark sssPas encore d'évaluation
- Actividad #1 RobóticaDocument5 pagesActividad #1 RobóticaBryan TGPas encore d'évaluation
- Carretillas Sin ConductorDocument7 pagesCarretillas Sin ConductorSolórzano VíctorPas encore d'évaluation
- Automatización SincrónicaDocument4 pagesAutomatización Sincrónicaantipatrica6589Pas encore d'évaluation
- Los Robots Móviles Están Provistos de Un Sistema de AutomociónDocument8 pagesLos Robots Móviles Están Provistos de Un Sistema de AutomociónCYNTHIA CHACONPas encore d'évaluation
- Aplicaciones de Los RobotsDocument15 pagesAplicaciones de Los RobotsAidee84Pas encore d'évaluation
- Trabajo Robotstudio - MemoriaDocument17 pagesTrabajo Robotstudio - MemoriaJavier LapuentePas encore d'évaluation
- Sistemas de ManufacturaDocument14 pagesSistemas de ManufacturaYazmín PaniaguaPas encore d'évaluation
- Actualisacion de SistemasDocument14 pagesActualisacion de SistemasBryan Alexis Rodriguez VazquezPas encore d'évaluation
- Información DiapositivasDocument3 pagesInformación DiapositivasCaren HatshePas encore d'évaluation
- Líneas de ProducciónDocument14 pagesLíneas de ProducciónJhon Alejandro SanchezPas encore d'évaluation
- Linea de EnsambleDocument27 pagesLinea de EnsambleCristian Salinas50% (6)
- Fundamentos de Líneas de ProducciónDocument2 pagesFundamentos de Líneas de ProducciónRafael RamosPas encore d'évaluation
- Informe - Sistemas Oleoneumaticos - P4 - at - JMDocument7 pagesInforme - Sistemas Oleoneumaticos - P4 - at - JMRony MedinaPas encore d'évaluation
- Ayy TaDocument6 pagesAyy TaJuan Lopez HernandezPas encore d'évaluation
- Línea de Ensamble ManualDocument5 pagesLínea de Ensamble ManualAlonso R. Alonso Corral0% (3)
- Robotica 2Document6 pagesRobotica 2Abel NievesPas encore d'évaluation
- Voice PickingDocument6 pagesVoice PickingMaria IgnaciaPas encore d'évaluation
- Utilización de Robots de Soldadura para La Automatización de ProcesosDocument6 pagesUtilización de Robots de Soldadura para La Automatización de Procesosluis angel estradaPas encore d'évaluation
- Avance 2Document9 pagesAvance 2CarlosSantanaPas encore d'évaluation
- Aplicacion de 2 EjemplosDocument3 pagesAplicacion de 2 EjemplosViviana CocaricoPas encore d'évaluation
- Capítulo 1 Hasta Antes de HipotesisDocument4 pagesCapítulo 1 Hasta Antes de HipotesisJose Pedro RoquePas encore d'évaluation
- MANUFACTURADocument35 pagesMANUFACTURAcinthyajael87Pas encore d'évaluation
- Tiempo de Demora en Reparacion de AscensoresDocument20 pagesTiempo de Demora en Reparacion de AscensoresJose Leornardo CondoriPas encore d'évaluation
- Implantación de RobotsDocument29 pagesImplantación de RobotsGabriela Llerena100% (1)
- Celdas de ManufacturaDocument8 pagesCeldas de ManufacturaIram AbifPas encore d'évaluation
- Lineas de TransferenciaDocument23 pagesLineas de TransferenciaJose Hilario Rivera RezaPas encore d'évaluation
- Informe Brazo RoboticoDocument8 pagesInforme Brazo RoboticoChichOo GonzazlxPas encore d'évaluation
- Actividad 1 Procesos de ManufacturaDocument7 pagesActividad 1 Procesos de ManufacturaAlejandra MoralesPas encore d'évaluation
- Sistemas Mecatronicos Cap 14Document14 pagesSistemas Mecatronicos Cap 14AngelitoHBKPas encore d'évaluation
- Robots Industriales en El PerúDocument15 pagesRobots Industriales en El PerúMIGUELPas encore d'évaluation
- SIMM Brazo Robot 6 EjesDocument10 pagesSIMM Brazo Robot 6 EjesCristoObal GuevaraPas encore d'évaluation
- Cuando Conviene Automatizar Un Proceso de Soldadura Con RobotsDocument4 pagesCuando Conviene Automatizar Un Proceso de Soldadura Con RobotsArielPas encore d'évaluation
- Manejo de Material en Una Célula de ManufacturaDocument6 pagesManejo de Material en Una Célula de ManufacturaIsaac FNPas encore d'évaluation
- Resumen CoriatDocument7 pagesResumen Coriatlilips100% (4)
- Introduccion A La SoldaduraDocument54 pagesIntroduccion A La SoldaduraJohn SantosPas encore d'évaluation
- PI-2 Ingeniería Del Proyecto MMRDocument35 pagesPI-2 Ingeniería Del Proyecto MMRAnghela Ortiz FloresPas encore d'évaluation
- Anteproyecto (Chiller) - Neiker SulbaranDocument9 pagesAnteproyecto (Chiller) - Neiker SulbaranGabriel DestrePas encore d'évaluation
- Proceso de Montaje y Desmontaje de AndamiosDocument59 pagesProceso de Montaje y Desmontaje de AndamiosJorge PintoPas encore d'évaluation
- Estructura de Una AutomatizacionDocument43 pagesEstructura de Una AutomatizacionandresPas encore d'évaluation
- Control Remoto de Ventanas Automaticas PDFDocument90 pagesControl Remoto de Ventanas Automaticas PDFamiguitoPas encore d'évaluation
- Guía 03 - Salida PWM PLC S7 1200Document5 pagesGuía 03 - Salida PWM PLC S7 1200Arnold Hernández CarvajalPas encore d'évaluation
- Eficacia Personal RaimonDocument5 pagesEficacia Personal RaimonNayarith JiménezPas encore d'évaluation
- Aire AcondicionadoDocument5 pagesAire AcondicionadoManuel PertuzPas encore d'évaluation
- Montaje Tablero de Control Con ElectrobombaDocument13 pagesMontaje Tablero de Control Con ElectrobombajuanPas encore d'évaluation
- Fichas de Equipos Requeridos FINAL 2017Document134 pagesFichas de Equipos Requeridos FINAL 2017miguel cuestaPas encore d'évaluation
- Unidad 1 - TPIDADocument30 pagesUnidad 1 - TPIDADepartamento EEPas encore d'évaluation
- Las Cinco C - Razones para Iniciar Un Proyecto de Sistemas de InformacionDocument2 pagesLas Cinco C - Razones para Iniciar Un Proyecto de Sistemas de InformacioneurekaprojectPas encore d'évaluation
- Produccion en SerieDocument3 pagesProduccion en SerieMiguel Vega Serna100% (1)
- Trabajo Practico ValvulasDocument24 pagesTrabajo Practico ValvulasPriscila CruzPas encore d'évaluation
- Domotica Con Packet Tracer 3Document13 pagesDomotica Con Packet Tracer 3Juan RobertoPas encore d'évaluation
- WEG CFW 09 Convert Id Ores de Frecuencia 1033 Catalogo EspanolDocument40 pagesWEG CFW 09 Convert Id Ores de Frecuencia 1033 Catalogo Espanolvivac9Pas encore d'évaluation
- Laboratorio N°5 Prensa NeumáticaDocument8 pagesLaboratorio N°5 Prensa NeumáticaKisaraTiPas encore d'évaluation
- Scada Con Movicon y M221Document26 pagesScada Con Movicon y M221Manuel QuirozPas encore d'évaluation
- RoboticaDocument5 pagesRoboticaFrank GodoyPas encore d'évaluation
- Sistemas Industriales DistribuidosDocument7 pagesSistemas Industriales DistribuidosArtemas QuiPas encore d'évaluation
- 6 EstrategiasDocument2 pages6 EstrategiasMary Pedro Ochoa100% (1)
- Cot 3107 Planta Compacta de Tratamiento 3.6 LPS MJDCHDocument7 pagesCot 3107 Planta Compacta de Tratamiento 3.6 LPS MJDCHPerez JhadielPas encore d'évaluation
- JALASOFTDocument5 pagesJALASOFTJohnny Franz Terrazas ChaconPas encore d'évaluation
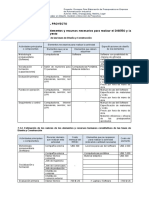
- Especificaciones Del Proyecto 7.1. Descripción de Los Elementos y Recursos Necesarios para Realizar El DISEÑO y La CONSTRUCCIÓN Del ProyectoDocument5 pagesEspecificaciones Del Proyecto 7.1. Descripción de Los Elementos y Recursos Necesarios para Realizar El DISEÑO y La CONSTRUCCIÓN Del ProyectoIng Geranes Leger0% (1)
- Toyota 2.0Document10 pagesToyota 2.0AGUIRRE NECHA ANDREPas encore d'évaluation
- Beneficios de Un ControladorDocument4 pagesBeneficios de Un ControladorDiego Edson Yucra ParishuañaPas encore d'évaluation
- Modbus Rtu y TCPDocument30 pagesModbus Rtu y TCPVictor GodoyPas encore d'évaluation
- Práctica 3 AutomatizaciónDocument7 pagesPráctica 3 AutomatizaciónElías ArriolaPas encore d'évaluation
- Ergonomia en El Sector Del MetalDocument11 pagesErgonomia en El Sector Del MetalEduardo EduPas encore d'évaluation
- Influencia. La psicología de la persuasiónD'EverandInfluencia. La psicología de la persuasiónÉvaluation : 4.5 sur 5 étoiles4.5/5 (14)
- Ciencia de datos: La serie de conocimientos esenciales de MIT PressD'EverandCiencia de datos: La serie de conocimientos esenciales de MIT PressÉvaluation : 5 sur 5 étoiles5/5 (1)
- 7 tendencias digitales que cambiarán el mundoD'Everand7 tendencias digitales que cambiarán el mundoÉvaluation : 4.5 sur 5 étoiles4.5/5 (87)
- Inteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroD'EverandInteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroÉvaluation : 4 sur 5 étoiles4/5 (1)
- Sistema de gestión lean para principiantes: Fundamentos del sistema de gestión lean para pequeñas y medianas empresas - con muchos ejemplos prácticosD'EverandSistema de gestión lean para principiantes: Fundamentos del sistema de gestión lean para pequeñas y medianas empresas - con muchos ejemplos prácticosÉvaluation : 4 sur 5 étoiles4/5 (16)
- Cultura y clima: fundamentos para el cambio en la organizaciónD'EverandCultura y clima: fundamentos para el cambio en la organizaciónPas encore d'évaluation
- EL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.D'EverandEL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.Évaluation : 4 sur 5 étoiles4/5 (51)
- Clics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaD'EverandClics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaÉvaluation : 4.5 sur 5 étoiles4.5/5 (117)
- Guía para la aplicación de ISO 9001 2015D'EverandGuía para la aplicación de ISO 9001 2015Évaluation : 4 sur 5 étoiles4/5 (1)
- Guía de aplicacion de la ISO 9001:2015D'EverandGuía de aplicacion de la ISO 9001:2015Évaluation : 5 sur 5 étoiles5/5 (3)
- Inteligencia artificial: Una exploración filosófica sobre el futuro de la mente y la concienciaD'EverandInteligencia artificial: Una exploración filosófica sobre el futuro de la mente y la concienciaAna Isabel Sánchez DíezÉvaluation : 4 sur 5 étoiles4/5 (3)
- Excel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másD'EverandExcel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másÉvaluation : 2.5 sur 5 étoiles2.5/5 (3)
- Electrónica básica: INGENIERÍA ELECTRÓNICA Y DE LAS COMUNICACIONESD'EverandElectrónica básica: INGENIERÍA ELECTRÓNICA Y DE LAS COMUNICACIONESÉvaluation : 5 sur 5 étoiles5/5 (16)
- Reparar (casi) cualquier cosa: Cómo ajustar los objetos de uso cotidiano con la electrónica y la impresora 3DD'EverandReparar (casi) cualquier cosa: Cómo ajustar los objetos de uso cotidiano con la electrónica y la impresora 3DÉvaluation : 5 sur 5 étoiles5/5 (6)
- Excel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteD'EverandExcel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteÉvaluation : 1 sur 5 étoiles1/5 (1)
- GuíaBurros Microsoft Excel: Todo lo que necesitas saber sobre esta potente hoja de cálculoD'EverandGuíaBurros Microsoft Excel: Todo lo que necesitas saber sobre esta potente hoja de cálculoÉvaluation : 3.5 sur 5 étoiles3.5/5 (6)
- Toma de decisiones en las empresas: Entre el arte y la técnica: Metodologías, modelos y herramientasD'EverandToma de decisiones en las empresas: Entre el arte y la técnica: Metodologías, modelos y herramientasPas encore d'évaluation
- Radiocomunicaciones: Teoría y principiosD'EverandRadiocomunicaciones: Teoría y principiosÉvaluation : 5 sur 5 étoiles5/5 (3)
- Prácticas de refrigeración y aire acondicionadoD'EverandPrácticas de refrigeración y aire acondicionadoÉvaluation : 5 sur 5 étoiles5/5 (6)
- Scrum Las Estrategias del Juego: Es Póker, No AjedrezD'EverandScrum Las Estrategias del Juego: Es Póker, No AjedrezÉvaluation : 5 sur 5 étoiles5/5 (1)
- Cómo ser una Persona más Sociable: Aprende a hablar con cualquiera sin temor e incrementa por completo tu inteligencia socialD'EverandCómo ser una Persona más Sociable: Aprende a hablar con cualquiera sin temor e incrementa por completo tu inteligencia socialÉvaluation : 4.5 sur 5 étoiles4.5/5 (34)
- Diseño, construcción y pruebas de horno prototipo semicontinuo para producir cerámicaD'EverandDiseño, construcción y pruebas de horno prototipo semicontinuo para producir cerámicaPas encore d'évaluation