Vous aimerez peut-être aussi
- 3 2e PDFDocument3 pages3 2e PDFSam RoycePas encore d'évaluation
- 565 7018 Magic Bio Enzymatic Foul Odor Organic Stain Remover SDSDocument5 pages565 7018 Magic Bio Enzymatic Foul Odor Organic Stain Remover SDSSam Royce100% (1)
- 565 7018 Magic Bio Enzymatic Foul Odor Organic Stain Remover SDSDocument5 pages565 7018 Magic Bio Enzymatic Foul Odor Organic Stain Remover SDSSam Royce100% (1)
- Practice SolutionsDocument31 pagesPractice SolutionsStevenPas encore d'évaluation
- Practice Problems DesignDocument5 pagesPractice Problems DesignEric Ibarra100% (2)
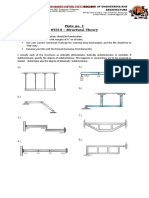
- Plate No. 1 ST314 - Structural Theory: Don Honorio Ventura State UniversityDocument4 pagesPlate No. 1 ST314 - Structural Theory: Don Honorio Ventura State UniversityRamil T. TrinidadPas encore d'évaluation
- MATH Activity 7Document3 pagesMATH Activity 7EurydicePas encore d'évaluation
- Mechanics of Rigid BodiesDocument15 pagesMechanics of Rigid BodiessoulcivicPas encore d'évaluation
- Essential Elementary Algebra TextbookDocument1 334 pagesEssential Elementary Algebra TextbookPhilippe Dubost100% (1)
- Area Moment MethodDocument5 pagesArea Moment Methodjclou02110% (1)
- Table of Contents (Arsh)Document13 pagesTable of Contents (Arsh)Arshid Kalid MagandianPas encore d'évaluation
- Double Integration SMATDocument12 pagesDouble Integration SMATAndrew JosePas encore d'évaluation
- Boietz' Slope & Deflection Diagram by PartsDocument10 pagesBoietz' Slope & Deflection Diagram by PartsPapaDaplisPas encore d'évaluation
- Basic Ee Module 1 Discussion 2 Me2bDocument41 pagesBasic Ee Module 1 Discussion 2 Me2bStephen papaPas encore d'évaluation
- Problem Set No.1-MidtermDocument31 pagesProblem Set No.1-MidtermROYCE1983Pas encore d'évaluation
- Homework 1 3Document6 pagesHomework 1 3inisdeprawn100% (2)
- Statics SolutionDocument7 pagesStatics SolutionshaniakiwiPas encore d'évaluation
- Statics of Rigid Bodies Problem Set 1 SolutionsDocument2 pagesStatics of Rigid Bodies Problem Set 1 SolutionsGillian AmbaPas encore d'évaluation
- Fluid Mechanics - Problems - July 4Document7 pagesFluid Mechanics - Problems - July 4John Paul JacalanPas encore d'évaluation
- Ce Correl Dynamics Situation 1Document3 pagesCe Correl Dynamics Situation 1Glenn Frey LayugPas encore d'évaluation
- Shear Force and Bending Moment Diagrams (SFD & BMDDocument17 pagesShear Force and Bending Moment Diagrams (SFD & BMDkundayi shavaPas encore d'évaluation
- Geometry 100-200Document14 pagesGeometry 100-200Franz Anfernee Felipe GenerosoPas encore d'évaluation
- Ce Reviewer MathDocument16 pagesCe Reviewer MathZherrinore Rasay100% (1)
- Theory of Structures FormulaDocument1 pageTheory of Structures FormulaArjay AlibinPas encore d'évaluation
- Dynamics of Rigid BodiesDocument3 pagesDynamics of Rigid BodiesRalph Lauren RodriguezPas encore d'évaluation
- Chapter 8 Slope and Deflection Strength of Materials - Part 1Document14 pagesChapter 8 Slope and Deflection Strength of Materials - Part 1Abhijith ShettyPas encore d'évaluation
- Ce Board Strength ReviewerDocument1 pageCe Board Strength ReviewerZherrinore RasayPas encore d'évaluation
- Lesson 1 Surveying ARC PDFDocument32 pagesLesson 1 Surveying ARC PDFLiza Jean NervarPas encore d'évaluation
- Exam 20131Document2 pagesExam 20131Argie AdduruPas encore d'évaluation
- Report Math2.1Document15 pagesReport Math2.1Anonymous qOUo59FCPas encore d'évaluation
- Engg MechanicsDocument151 pagesEngg MechanicsMartin De Boras PragashPas encore d'évaluation
- TrussDocument63 pagesTrussBojja JayaPrakashPas encore d'évaluation
- EDA1Document3 pagesEDA1MigaeaPas encore d'évaluation
- MCE01a QUIZ 2Document6 pagesMCE01a QUIZ 2venom thecatPas encore d'évaluation
- Chapter 03 Equilibrium - 2D ExerciseDocument21 pagesChapter 03 Equilibrium - 2D ExerciseHassam Balouch50% (2)
- Basic Engineering Correlation (Algebra Reviewer) : + 18y + 8y - 4 Is Divided by 2y + 3, The Remainder IsDocument16 pagesBasic Engineering Correlation (Algebra Reviewer) : + 18y + 8y - 4 Is Divided by 2y + 3, The Remainder Ischristine emerald ricohermosoPas encore d'évaluation
- Integral Calculus Finals ReviewerDocument12 pagesIntegral Calculus Finals ReviewerIchiroue Whan GPas encore d'évaluation
- 1.0 Intro Engineering Utilities 1Document59 pages1.0 Intro Engineering Utilities 1Miguel Is My NamePas encore d'évaluation
- Math Set 1 Refresher PDFDocument2 pagesMath Set 1 Refresher PDFLester John PrecillasPas encore d'évaluation
- Strength of Materials 1 PDFDocument3 pagesStrength of Materials 1 PDFMaxPas encore d'évaluation
- Module 9 - Shear & Moment DiagramDocument25 pagesModule 9 - Shear & Moment DiagramJerome Garganera100% (1)
- Structural Theory 1 (Part 2)Document11 pagesStructural Theory 1 (Part 2)GinoOcampoPas encore d'évaluation
- CH 2finalDocument39 pagesCH 2finalAlbino PaivaPas encore d'évaluation
- Module 2 (Horizontal Route Alignment 1)Document6 pagesModule 2 (Horizontal Route Alignment 1)Owene Miles AguinaldoPas encore d'évaluation
- Integral Calculus: Engr. Anacleto M. Cortez JRDocument10 pagesIntegral Calculus: Engr. Anacleto M. Cortez JRPanfilo Diaz LacsonPas encore d'évaluation
- Chapter 2 Probability Sample Spaces and EventsDocument5 pagesChapter 2 Probability Sample Spaces and EventsChristopher MabborangPas encore d'évaluation
- Design Built A Young Jackfruit Skin Peeler MachineDocument7 pagesDesign Built A Young Jackfruit Skin Peeler Machinededi gunawanPas encore d'évaluation
- MECHANICAL ENGINEERING MULTIPLE CHOICE QUESTION ANALYTIC GEOMETRYDocument7 pagesMECHANICAL ENGINEERING MULTIPLE CHOICE QUESTION ANALYTIC GEOMETRYFrosch EsquierdoPas encore d'évaluation
- CE 3111 Lecture Notes 3-1Document44 pagesCE 3111 Lecture Notes 3-1Kent Clark VillaPas encore d'évaluation
- Design of Compression Members-3Document62 pagesDesign of Compression Members-3eseem0% (1)
- Quiz Assignment No.6Document4 pagesQuiz Assignment No.6CHA CHAPas encore d'évaluation
- Method of SectionsDocument15 pagesMethod of SectionsDesti Gokil's K-AsgammaPas encore d'évaluation
- Basic Engineering Correlation Admath X de 001Document6 pagesBasic Engineering Correlation Admath X de 001Ska dooshPas encore d'évaluation
- Elementary Theory of StructuresDocument112 pagesElementary Theory of StructuresGodwin AcquahPas encore d'évaluation
- Triangle, square, circle geometry & area word problemsDocument2 pagesTriangle, square, circle geometry & area word problemsAncheta Suzanne ClarissePas encore d'évaluation
- Calculate Area by DMD and DPDDocument4 pagesCalculate Area by DMD and DPDBryanHarold BrooPas encore d'évaluation
- Forces in 3DDocument11 pagesForces in 3DAdeboye BusayoPas encore d'évaluation
- Statics of Rigid Bodies: Chapter 2: Force VectorsDocument42 pagesStatics of Rigid Bodies: Chapter 2: Force VectorsRyan Philip CatapangPas encore d'évaluation
- Vectors and Scalar Quantities: Chapter ObjectivesDocument56 pagesVectors and Scalar Quantities: Chapter ObjectivesLionel MessiPas encore d'évaluation
- Chapter 2 VectorsDocument14 pagesChapter 2 Vectorsfatimaizzah24Pas encore d'évaluation
- Master the Fundamentals of Electromagnetism and EM-InductionD'EverandMaster the Fundamentals of Electromagnetism and EM-InductionPas encore d'évaluation
- Vector and Tensor Analysis with ApplicationsD'EverandVector and Tensor Analysis with ApplicationsÉvaluation : 4 sur 5 étoiles4/5 (10)
- VTEAM: A General Model For Voltage-Controlled MemristorsDocument5 pagesVTEAM: A General Model For Voltage-Controlled MemristorsSam RoycePas encore d'évaluation
- Ethical TheoryDocument12 pagesEthical TheoryPriyanka SinglaPas encore d'évaluation
- Chapter 3: Static Fluid: Department of Hydraulic Engineering - School of Civil Engineering - Shandong University - 2007Document60 pagesChapter 3: Static Fluid: Department of Hydraulic Engineering - School of Civil Engineering - Shandong University - 2007Sam RoycePas encore d'évaluation
- 12 Sequential Circuit AnalysisDocument30 pages12 Sequential Circuit AnalysisSam RoycePas encore d'évaluation
- 1Document6 pages1Sam RoycePas encore d'évaluation
- 3 1p PDFDocument2 pages3 1p PDFSam RoycePas encore d'évaluation
- Name: - Last 4 Univ ID: - This Activity Covers Fundamental Concepts From Material Found in Lecture 8Document1 pageName: - Last 4 Univ ID: - This Activity Covers Fundamental Concepts From Material Found in Lecture 8Sam RoycePas encore d'évaluation
- See Problem List 1 Posted Under Exam 2 Folder (Blackboard)Document1 pageSee Problem List 1 Posted Under Exam 2 Folder (Blackboard)Sam RoycePas encore d'évaluation
- An Automobile Travels To The Right at A Constant Speed oDocument1 pageAn Automobile Travels To The Right at A Constant Speed oSam RoycePas encore d'évaluation
- Tutorial 4 Question 2010Document1 pageTutorial 4 Question 2010Sam RoycePas encore d'évaluation
- A Deadly Secret PDFDocument322 pagesA Deadly Secret PDFSona Chalasani100% (5)
- EnzymesDocument17 pagesEnzymesakshaymoga0% (1)
- Sda Enzyme Risk Guidance October 2005Document58 pagesSda Enzyme Risk Guidance October 2005Sam RoycePas encore d'évaluation
- Creo 2.0 AdvancedDocument128 pagesCreo 2.0 AdvancedErdoan Mustafov75% (4)
- AP 9.13 Abs - Val.labDocument5 pagesAP 9.13 Abs - Val.labSam RoycePas encore d'évaluation
- Cell Biology PDFDocument35 pagesCell Biology PDFLega Wann0% (1)
- Gpa Comp WorksheetDocument1 pageGpa Comp WorksheetSam RoycePas encore d'évaluation
- Notes Class3 4 5 6 - Scan20140125sat 1233hrs - p14Document15 pagesNotes Class3 4 5 6 - Scan20140125sat 1233hrs - p14Sam RoycePas encore d'évaluation
- EML 3004 Physics Review Test Equation SheetDocument1 pageEML 3004 Physics Review Test Equation SheetSam RoycePas encore d'évaluation
- How To Succeed in K-State Math Courses: Epartment of AthematicsDocument1 pageHow To Succeed in K-State Math Courses: Epartment of AthematicsSam RoycePas encore d'évaluation
- MCAT 5R SolutionsDocument39 pagesMCAT 5R SolutionsTravanL.Hurst100% (3)
- IGCSE Biology NotesDocument50 pagesIGCSE Biology NotesPrincess Kim100% (2)
- NCERT Solution For Class 9 Maths Chapter 2- PolynomialsDocument30 pagesNCERT Solution For Class 9 Maths Chapter 2- PolynomialsAdvayPas encore d'évaluation
- Math 8th Ncert 23-24Document173 pagesMath 8th Ncert 23-24questgen25Pas encore d'évaluation
- Ariella 1966629098Document11 pagesAriella 1966629098Ravi DixitPas encore d'évaluation
- Algebra Review (New)Document3 pagesAlgebra Review (New)Michelle OuyangPas encore d'évaluation
- Learning Competencies: The Learners CanDocument39 pagesLearning Competencies: The Learners CanJohn Mark MatibagPas encore d'évaluation
- Narratives From GPT-derived Networks of News, and A Link To Financial Markets DislocationsDocument10 pagesNarratives From GPT-derived Networks of News, and A Link To Financial Markets Dislocationsyehel44914Pas encore d'évaluation
- AlgodetensoresDocument90 pagesAlgodetensorescuentaparadescargarPas encore d'évaluation
- Stereographic ProjectionDocument3 pagesStereographic Projectionap021Pas encore d'évaluation
- A PROOF OF SUBBARAO'S CONJECTURE, by CRISTIAN-SILVIU RADUDocument13 pagesA PROOF OF SUBBARAO'S CONJECTURE, by CRISTIAN-SILVIU RADUCercetare ConstanțaPas encore d'évaluation
- Basic Mathematics: Number Systems, Sets, and Rational InequalitiesDocument39 pagesBasic Mathematics: Number Systems, Sets, and Rational InequalitiesvineetthesupermanPas encore d'évaluation
- A Concise, SEO-Optimized Title for a Document on the Lagrange Inversion FormulaDocument4 pagesA Concise, SEO-Optimized Title for a Document on the Lagrange Inversion FormulaVictor MarchantPas encore d'évaluation
- C4 Partial Fractions A - QuestionsDocument2 pagesC4 Partial Fractions A - QuestionssrinivasPas encore d'évaluation
- 7 TestDocument9 pages7 TestЕралы БегалыPas encore d'évaluation
- Math Grade 7 DLL Q2 W5Document3 pagesMath Grade 7 DLL Q2 W5thalia alfaroPas encore d'évaluation
- Adding and Subtracting FractionsDocument20 pagesAdding and Subtracting FractionsTuan PhamPas encore d'évaluation
- 9th Math Notes Solved Compiled by Urdu Books GroupDocument97 pages9th Math Notes Solved Compiled by Urdu Books Groupشیدا ٹلیPas encore d'évaluation
- MATH3175 Fa10 Sol2 PDFDocument4 pagesMATH3175 Fa10 Sol2 PDFShakir KhattakPas encore d'évaluation
- Gr10Math Week3Day3 FactorRationalRoot-TheoremsDocument44 pagesGr10Math Week3Day3 FactorRationalRoot-TheoremsMark Cañete PunongbayanPas encore d'évaluation
- Fuzzy Representations of Groups and ModulesDocument46 pagesFuzzy Representations of Groups and ModulesmsmramansrimathiPas encore d'évaluation
- Complex Analysis & Combinatorics: Solve Combinatorial Series Using Complex NumbersDocument15 pagesComplex Analysis & Combinatorics: Solve Combinatorial Series Using Complex NumbersHeartlez KZPas encore d'évaluation
- 1.4 Properties of Real NumbersDocument2 pages1.4 Properties of Real NumbersPamela TheobaldPas encore d'évaluation
- Mathematics Quarter 3 PDFDocument32 pagesMathematics Quarter 3 PDFJustine Cole CariñoPas encore d'évaluation
- If You Don't Learn From Your Mistakes, There's No Sense of Making ThemDocument58 pagesIf You Don't Learn From Your Mistakes, There's No Sense of Making ThemCayetano, Tara Leigh MartinezPas encore d'évaluation
- Table of Specification (Revised)Document2 pagesTable of Specification (Revised)karissa joyce eslaoPas encore d'évaluation
- Finding Minimal POS With A K-MapDocument3 pagesFinding Minimal POS With A K-MapsaipranathiPas encore d'évaluation
- Mini Project: GCD Using Euclid's AlgorithmDocument4 pagesMini Project: GCD Using Euclid's AlgorithmshrutiPas encore d'évaluation
- 2nd Quarter Math 7Document5 pages2nd Quarter Math 7futalan luced joyPas encore d'évaluation
- Taylor's SeriesDocument10 pagesTaylor's SeriesShreemay BhuyanPas encore d'évaluation
- L10 - Sequences and SeriesDocument4 pagesL10 - Sequences and Serieswe_spidus_2006Pas encore d'évaluation