Vous aimerez peut-être aussi
- Taller Circuitos Con DiodosDocument2 pagesTaller Circuitos Con DiodosRONALD STIVEN BEJARANO LARRAHONDOPas encore d'évaluation
- Electrónica para Ingenieros Bjt-12.6Document90 pagesElectrónica para Ingenieros Bjt-12.6Ronald Molina Bravo100% (1)
- Taller Sobre VectoresDocument2 pagesTaller Sobre VectoresLeonardo CorzoPas encore d'évaluation
- Cinematic ADocument9 pagesCinematic ASzni VenturaPas encore d'évaluation
- TA1 - Capitulo1 - Automatizacion de Procesos IndustrialesDocument67 pagesTA1 - Capitulo1 - Automatizacion de Procesos IndustrialesGeorge LucasPas encore d'évaluation
- Control de Potencia de CD Por SCRDocument4 pagesControl de Potencia de CD Por SCRmaxPas encore d'évaluation
- TEMA 10 ProblemasDocument40 pagesTEMA 10 ProblemasByron GonzálezPas encore d'évaluation
- Ilovepdf Merged PDFDocument6 pagesIlovepdf Merged PDFEduardo Saavedra LizarazúPas encore d'évaluation
- De Martin Negrin Guillermo TRABAJO 10Document15 pagesDe Martin Negrin Guillermo TRABAJO 10GuillermoPas encore d'évaluation
- Informe 4 Oscilador SCRDocument11 pagesInforme 4 Oscilador SCRCristian Yoel Miranda JaraPas encore d'évaluation
- Motor GiroDocument3 pagesMotor GiroJoha BermudezPas encore d'évaluation
- Solucionario Segundo Parcial I-2021Document4 pagesSolucionario Segundo Parcial I-2021Alverto FernandezPas encore d'évaluation
- B) Metodo Paso A PasoDocument4 pagesB) Metodo Paso A PasoandrePas encore d'évaluation
- Ejercicios de FisicaDocument4 pagesEjercicios de FisicaEdwin VargasPas encore d'évaluation
- POLEASDocument16 pagesPOLEASPositiva HDPas encore d'évaluation
- Me II 204 Operacion Dinamica de Maquinas Electricas AmpliadaDocument32 pagesMe II 204 Operacion Dinamica de Maquinas Electricas AmpliadaEdgar Vidal Espinoza OrtegaPas encore d'évaluation
- Formulario Unidad 2 Diseño MecanicoDocument7 pagesFormulario Unidad 2 Diseño MecanicoYuleimyPas encore d'évaluation
- Cuaderno Teoría ElectromagnéticaDocument21 pagesCuaderno Teoría ElectromagnéticaEnrique RehaPas encore d'évaluation
- Ley de Coulomb e IntensidadDocument18 pagesLey de Coulomb e IntensidadDanilo Ninacuri0% (1)
- Diseño y Análisis de Un Sensor TPMSDocument9 pagesDiseño y Análisis de Un Sensor TPMSAngel MingaPas encore d'évaluation
- Unidad 1 Rectificadores No Controlados PDFDocument13 pagesUnidad 1 Rectificadores No Controlados PDFLuis Felipe Lopez PerezPas encore d'évaluation
- Sistemas DigitalesDocument3 pagesSistemas DigitalesBrandon GuerreroPas encore d'évaluation
- Dinamicas TrabajoDocument6 pagesDinamicas TrabajoGeoffreyW.SalasDelgadoPas encore d'évaluation
- 06 Fet Como ConmutadorDocument6 pages06 Fet Como ConmutadorRodrigo GonzalezPas encore d'évaluation
- CODIFICACION BINARIA (Paper Teoria)Document6 pagesCODIFICACION BINARIA (Paper Teoria)Joseph Muje RamosPas encore d'évaluation
- CortacircuitosDocument8 pagesCortacircuitosoncemunicipalPas encore d'évaluation
- Guía Práctica de Matlab - CDDocument8 pagesGuía Práctica de Matlab - CDjaimePas encore d'évaluation
- La Funcion de Transferencia Graficos de Flujo de Señal y Diagramas de Bloques PDFDocument4 pagesLa Funcion de Transferencia Graficos de Flujo de Señal y Diagramas de Bloques PDFEdwin Max RChPas encore d'évaluation
- Monografia Auto Solar TecnoDocument32 pagesMonografia Auto Solar TecnoJuan Cruz AyalaPas encore d'évaluation
- Simulacion de Circuitos Neumaticos en FluidsimDocument15 pagesSimulacion de Circuitos Neumaticos en FluidsimWeimar G. SalazarPas encore d'évaluation
- 3 - Circuitos Con Dos TransistoresDocument4 pages3 - Circuitos Con Dos TransistoresDadwin Zavala Bautista100% (2)
- Ejercicios de PLC RelevaciónDocument4 pagesEjercicios de PLC RelevaciónSaulCastilloPas encore d'évaluation
- Campos ElectromagnéticosDocument5 pagesCampos Electromagnéticoseduardo cueva0% (1)
- Regiones Simple y Multiplemente Conexas - PresentacionDocument21 pagesRegiones Simple y Multiplemente Conexas - Presentacionmarkus_x86Pas encore d'évaluation
- Laboratorio Diodos y Transistores Como Interruptor (Switch) y AmplificadorDocument8 pagesLaboratorio Diodos y Transistores Como Interruptor (Switch) y AmplificadorAndres JosePas encore d'évaluation
- Tutomat SolucionarioDocument28 pagesTutomat Solucionario'Jhon AlexanderPas encore d'évaluation
- Problemas de Circuitos ElectricosDocument8 pagesProblemas de Circuitos ElectricosJunab Andrés CabañasPas encore d'évaluation
- Sistema Mecánico TraslacionalDocument2 pagesSistema Mecánico TraslacionalMario Roberto100% (1)
- Prueba Cap. 9Document4 pagesPrueba Cap. 9Darwin TapuyPas encore d'évaluation
- Compendio de Practicas Sensores 2005Document50 pagesCompendio de Practicas Sensores 2005zhefyroPas encore d'évaluation
- Ficha Tecnica Domotica Myhome BticinoDocument504 pagesFicha Tecnica Domotica Myhome Bticinoirene100% (1)
- 2 Partes de La Maquina de C.CDocument36 pages2 Partes de La Maquina de C.CPambazo JuarezPas encore d'évaluation
- Flujos de Señal en Sistemas de Control ModernoDocument9 pagesFlujos de Señal en Sistemas de Control ModernoEduardo Lopez AntonioPas encore d'évaluation
- Convertidor BuckBoostDocument9 pagesConvertidor BuckBoostLuchinEQPas encore d'évaluation
- Clase 8 El MICROCONTROLADOR - Familia PICDocument18 pagesClase 8 El MICROCONTROLADOR - Familia PICMiltonPas encore d'évaluation
- Ejercicios Potencia en CADocument4 pagesEjercicios Potencia en CAjuanjo1954100% (2)
- Contador de Pulzo para Servo MecanismosDocument6 pagesContador de Pulzo para Servo Mecanismoscarlosgabriel1971Pas encore d'évaluation
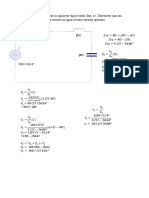
- Por Medio de La Fórmula en Forma Vectorial, Obtenemos:: V 424 Cos (2000 t+30), I 28.3 Cos (2000 t+83.2)Document2 pagesPor Medio de La Fórmula en Forma Vectorial, Obtenemos:: V 424 Cos (2000 t+30), I 28.3 Cos (2000 t+83.2)MupiigPas encore d'évaluation
- Acopladores de Impedancia TrabajoDocument5 pagesAcopladores de Impedancia TrabajoJuank TorresPas encore d'évaluation
- Práctica 2Document16 pagesPráctica 2Candido Basilio CruzPas encore d'évaluation
- Informe 2.10Document12 pagesInforme 2.10Vanessa Monsalve CastroPas encore d'évaluation
- Normalización ANSIDocument38 pagesNormalización ANSIXavier AlonsoPas encore d'évaluation
- Modelamiento de Un Sistema de Control de Posición de Un Lanza Misiles PDFDocument11 pagesModelamiento de Un Sistema de Control de Posición de Un Lanza Misiles PDFLuis AmantaPas encore d'évaluation
- User Manual SPC-7000-SPANISH Web-0629Document30 pagesUser Manual SPC-7000-SPANISH Web-0629James Jimenez LeonPas encore d'évaluation
- Tabla Comparativa de Motores para ProyectosDocument2 pagesTabla Comparativa de Motores para ProyectosJuan PerezPas encore d'évaluation
- Practica PWMDocument9 pagesPractica PWMIvan BalderasPas encore d'évaluation
- Generador de Funciones 567Document4 pagesGenerador de Funciones 567Rafael RamosPas encore d'évaluation
- Fuentes Simetricas o DualesDocument2 pagesFuentes Simetricas o DualesMiriam Fiorella Umasi HuamaniPas encore d'évaluation
- Definiciones de MecanismosDocument7 pagesDefiniciones de MecanismosBetancourt LRPas encore d'évaluation
- Mecanismo 4 Barras ReporteDocument13 pagesMecanismo 4 Barras ReporteMimi Flores Salazar100% (1)
- Libro Vibraciones Tomo1 FinalDocument179 pagesLibro Vibraciones Tomo1 FinalCarlos Rodrigo Hernández Pérez100% (1)
- Aislamientos de Vibraciones (Proyecto Final)Document13 pagesAislamientos de Vibraciones (Proyecto Final)Gersson AChPas encore d'évaluation
- Booklet T4 2014Document104 pagesBooklet T4 2014Documentos ImportantesPas encore d'évaluation
- Guia Placas de MetalDocument13 pagesGuia Placas de MetalConstructores De OrientePas encore d'évaluation
- Lean Six SigmaDocument1 pageLean Six SigmaGersson AChPas encore d'évaluation
- Tarea Final Diseño de Maquinas Resortes1Document10 pagesTarea Final Diseño de Maquinas Resortes1Gersson AChPas encore d'évaluation
- Guía para La Elaboración de Tesís Ingeniería USACDocument89 pagesGuía para La Elaboración de Tesís Ingeniería USACGersson AChPas encore d'évaluation
- Sistemas AmortiguadosDocument2 pagesSistemas AmortiguadosGersson AChPas encore d'évaluation
- Simulaciones Con MultisimDocument1 pageSimulaciones Con MultisimGersson AChPas encore d'évaluation
- Curso de Arrancadores SuavesDocument105 pagesCurso de Arrancadores SuavesJuanma002Pas encore d'évaluation
- Ciclo AtkinsonDocument2 pagesCiclo AtkinsonGersson AChPas encore d'évaluation
- Tarea Final Diseño de Maquinas Resortes1Document10 pagesTarea Final Diseño de Maquinas Resortes1Gersson AChPas encore d'évaluation
- Libro de Idioma Técnico 1 UsacDocument113 pagesLibro de Idioma Técnico 1 UsacGersson AChPas encore d'évaluation
- Norma CedenarDocument146 pagesNorma CedenaribaccaPas encore d'évaluation
- Radiacion Ionizante y No IonizanteDocument11 pagesRadiacion Ionizante y No IonizanteGersson ACh100% (1)
- STEP 7 - Programar Con STEP 7Document532 pagesSTEP 7 - Programar Con STEP 7Juan Carlos HernandezPas encore d'évaluation
- Proyectos Industriales CEKIT 002Document163 pagesProyectos Industriales CEKIT 002Gersson ACh100% (4)
- Industria Del CementoDocument15 pagesIndustria Del CementoGersson AChPas encore d'évaluation
- Proyecto Ing - EconomicaDocument9 pagesProyecto Ing - EconomicaGersson AChPas encore d'évaluation
- Guia para Ensayos de Campo en Equipos Elect. PotenciaDocument49 pagesGuia para Ensayos de Campo en Equipos Elect. PotenciaVladimir Beltrán Sierra100% (2)
- Bomba de CalorDocument12 pagesBomba de CalorGersson AChPas encore d'évaluation
- Circuitos Electricos 2Document2 pagesCircuitos Electricos 2Gersson AChPas encore d'évaluation
- Analisis de MecanismosDocument11 pagesAnalisis de MecanismosGerardo PadillaPas encore d'évaluation
- Ejercicios Sobre Cuerpos Vinculados.Document21 pagesEjercicios Sobre Cuerpos Vinculados.Fran CazeneuvePas encore d'évaluation
- Apunte - Examen Mecanica RacionalDocument3 pagesApunte - Examen Mecanica RacionalCesar Antonio Villarreal GallardoPas encore d'évaluation
- Cuadro Sinóptico Gonzalez Arroyo Cristian LaloDocument6 pagesCuadro Sinóptico Gonzalez Arroyo Cristian LaloCarlos Edgardo Rodriguez BenitesPas encore d'évaluation
- Regla de Las Fases de GibbsDocument5 pagesRegla de Las Fases de GibbsArturo RamirezPas encore d'évaluation
- Apuntes EI - 3 Cuerpos Vinculados v6Document18 pagesApuntes EI - 3 Cuerpos Vinculados v6German CuellarPas encore d'évaluation
- Robotica Tarea 2 Aportes Significativos 123Document25 pagesRobotica Tarea 2 Aportes Significativos 123Samuel GutierrezPas encore d'évaluation
- Unidad I Parte 5 Diagramas Cartesianos de CorrimientoDocument16 pagesUnidad I Parte 5 Diagramas Cartesianos de CorrimientoMiguelPas encore d'évaluation
- Problemas de Balances de MasaDocument41 pagesProblemas de Balances de MasaIsrael Jimenez RamosPas encore d'évaluation
- Grados de Libertad en Mecánica ClásicaDocument2 pagesGrados de Libertad en Mecánica Clásicadmy365Pas encore d'évaluation
- Vibraciones Mecánicas Sist Con 2 Grados de Libertad PDFDocument22 pagesVibraciones Mecánicas Sist Con 2 Grados de Libertad PDFFranklin Argandoña PérezPas encore d'évaluation
- 06.01.02 Criterio para El Diseño de Uniones PDFDocument6 pages06.01.02 Criterio para El Diseño de Uniones PDFAntonio FernandezPas encore d'évaluation
- Principios Fundamentales. 1Document8 pagesPrincipios Fundamentales. 1amisaelPas encore d'évaluation
- Distribución de BoltzmannDocument4 pagesDistribución de Boltzmannjuan marcoPas encore d'évaluation
- Actividades Unidad 4Document12 pagesActividades Unidad 4racso4242Pas encore d'évaluation
- Tarea4 Felipe LigetiDocument11 pagesTarea4 Felipe LigetiFelipe LigetiPas encore d'évaluation
- T1 - Conceptos Básicos PDFDocument45 pagesT1 - Conceptos Básicos PDFJavi RodriguezPas encore d'évaluation
- Mecánicá Párá Lá Automátizácion: Tarea 1.2 EslabonesDocument6 pagesMecánicá Párá Lá Automátizácion: Tarea 1.2 Eslaboneslunes pradoPas encore d'évaluation
- Regla de GibbsDocument3 pagesRegla de GibbsSilvIa UriBePas encore d'évaluation
- Memoria PFC Jokin AginagaDocument89 pagesMemoria PFC Jokin AginagaLuis Fernando Coronel GonzalezPas encore d'évaluation
- Trabajo Final de Sismo HechoDocument22 pagesTrabajo Final de Sismo Hechofreddman maradiagaPas encore d'évaluation
- Análisis Grados de LibertadDocument3 pagesAnálisis Grados de Libertadmarina perez sanabriaPas encore d'évaluation
- Introduccion y MovimientoDocument15 pagesIntroduccion y Movimientofernando navarroPas encore d'évaluation
- Control MultivariableDocument71 pagesControl MultivariableNomar garciaparraPas encore d'évaluation
- El Sólido Rigido y Tensor de InerciaDocument15 pagesEl Sólido Rigido y Tensor de InerciaSaul Salas GutierrezPas encore d'évaluation
- T02 MovilidadCadenasCinematicasDocument25 pagesT02 MovilidadCadenasCinematicasRuben Guijarro BlancoPas encore d'évaluation
- Dos Grados de LibertadDocument4 pagesDos Grados de LibertadFl CarlosPas encore d'évaluation
- Trabajo Grados de Libertad T.DDocument10 pagesTrabajo Grados de Libertad T.DDidierPas encore d'évaluation
- Dinamica NGLDocument43 pagesDinamica NGLMaRy GePas encore d'évaluation
- Sistemas de Varios Grados de Libertad PDFDocument23 pagesSistemas de Varios Grados de Libertad PDFandy zumbaPas encore d'évaluation