Vous aimerez peut-être aussi
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Coeficientes A B Y C para TermistoresDocument4 pagesCoeficientes A B Y C para TermistorescarlosPas encore d'évaluation
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Statistics For Managers Using Microsoft Excel: 6 Global EditionDocument53 pagesStatistics For Managers Using Microsoft Excel: 6 Global Edition015Devina UlimaPas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5795)
- A Comparative Analysis of Sift Surf Kaze Akaze Orb and BriskDocument10 pagesA Comparative Analysis of Sift Surf Kaze Akaze Orb and Briskminu samantarayPas encore d'évaluation
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Failure and Sensitivity Analysis of A Reconfigurable Vibrating Screen Using Finite Element AnalysisDocument12 pagesFailure and Sensitivity Analysis of A Reconfigurable Vibrating Screen Using Finite Element Analysisالمشري بدوPas encore d'évaluation
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Disk Scheduling AlgorithmsDocument3 pagesDisk Scheduling AlgorithmsAsh hmmmPas encore d'évaluation
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- Kcse 2019 Prediction-All PDFDocument220 pagesKcse 2019 Prediction-All PDFBadmind JnrPas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- S3 Ch7 Introduction To Probability QDocument17 pagesS3 Ch7 Introduction To Probability QF2D 10 FUNG SZE HANGPas encore d'évaluation
- A Comparing Collaborative Filtering and Hybrid Recommender System For E-CommerceDocument6 pagesA Comparing Collaborative Filtering and Hybrid Recommender System For E-CommerceIJRASETPublicationsPas encore d'évaluation
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- 2022-3-Midterm Exam in Educ 602-Part 2Document6 pages2022-3-Midterm Exam in Educ 602-Part 2Sharlene Mae DeiparinePas encore d'évaluation
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Various A-Level Economics NotesDocument7 pagesVarious A-Level Economics NotesYasheelPas encore d'évaluation
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- 'Work in Progress' - Analysing Nono's 'Il Canto Sospeso'Document57 pages'Work in Progress' - Analysing Nono's 'Il Canto Sospeso'iuhalsdjvauhPas encore d'évaluation
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- Ged 102 Exercise 3 Module 1 1Q 2021-2022Document3 pagesGed 102 Exercise 3 Module 1 1Q 2021-2022DES MOSPas encore d'évaluation
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Chapter 2 Practice AnswersDocument4 pagesChapter 2 Practice AnswersZeyad Moustafa100% (1)
- Topic 11.3 - Capacitance - AHLDocument50 pagesTopic 11.3 - Capacitance - AHLPaul AmezquitaPas encore d'évaluation
- Grejner Brzezinska2001Document9 pagesGrejner Brzezinska2001mainking2003Pas encore d'évaluation
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- CFDADVDocument183 pagesCFDADVKumar ChowdaryPas encore d'évaluation
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
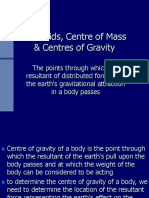
- Centroids, Centre of Mass & Centres of GravityDocument42 pagesCentroids, Centre of Mass & Centres of GravityGray RagudosPas encore d'évaluation
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- MBAN-603DE - Decision Making Methods & ToolsDocument3 pagesMBAN-603DE - Decision Making Methods & ToolsJeremy JarvisPas encore d'évaluation
- Buckling Column Assignmnet 2 ECS226&ECS238Document6 pagesBuckling Column Assignmnet 2 ECS226&ECS238udinhensembabiPas encore d'évaluation
- Barriers To Problem Solvingbarriers To Problem SolvingDocument4 pagesBarriers To Problem Solvingbarriers To Problem SolvingAtif HossainPas encore d'évaluation
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- Retaining Wall-Masonry Design and Calculation SpreadsheetDocument5 pagesRetaining Wall-Masonry Design and Calculation SpreadsheetTECHNOCONS CONST.Pas encore d'évaluation
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1091)
- q3 Basic CalculusDocument8 pagesq3 Basic CalculusDon Aldrich SantosPas encore d'évaluation
- Source Code 1Document40 pagesSource Code 1dinesh181899Pas encore d'évaluation
- Pengembangan Instrumen Tes Untuk Mengukur Kemampuan Berpikir Komputasi SiswaDocument10 pagesPengembangan Instrumen Tes Untuk Mengukur Kemampuan Berpikir Komputasi Siswaaliidrus2602Pas encore d'évaluation
- Consecutive, Series, and Reversible ReactionsDocument6 pagesConsecutive, Series, and Reversible ReactionsRojo JohnPas encore d'évaluation
- UPCAT Mathematics Practice Questions Set 2Document10 pagesUPCAT Mathematics Practice Questions Set 2Irishmae HervasPas encore d'évaluation
- PHYsicsDocument10 pagesPHYsicsonly1fxisguruPas encore d'évaluation
- Design of Pressure Vessels Under ASME Section VIIIDocument122 pagesDesign of Pressure Vessels Under ASME Section VIIIAnonymous d23gWCRQPas encore d'évaluation
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Notes For Students Xi (Programming and Computational Thinking) PDFDocument106 pagesNotes For Students Xi (Programming and Computational Thinking) PDFsuryansh tyagi0% (2)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)