Vous aimerez peut-être aussi
- Ejemplo de Un ProcedimientoDocument6 pagesEjemplo de Un ProcedimientoDOMENICA MESIASPas encore d'évaluation
- Automatizacion-Purificacion Del AguaDocument5 pagesAutomatizacion-Purificacion Del AguaDavid Catalan T.Pas encore d'évaluation
- PRACTICADocument10 pagesPRACTICAMeister YassirPas encore d'évaluation
- Algoritmo Bellman-FordDocument15 pagesAlgoritmo Bellman-FordIrvinj PhPas encore d'évaluation
- TAREADocument18 pagesTAREASandy RodriguezPas encore d'évaluation
- Automatizacion Redes de Agua PotableDocument16 pagesAutomatizacion Redes de Agua Potableapi-308655256Pas encore d'évaluation
- 5 SolesDocument23 pages5 SolesKarla GabrielPas encore d'évaluation
- Fortaleza 1Document4 pagesFortaleza 1Yoselin Leon AlarconPas encore d'évaluation
- Símbolos de Líneas ISADocument2 pagesSímbolos de Líneas ISAMauricio Avila100% (1)
- CHRM 280 Sahefo Ptap 2.0lpsDocument29 pagesCHRM 280 Sahefo Ptap 2.0lpsMonique FullerPas encore d'évaluation
- Sistemas de ControlDocument121 pagesSistemas de ControlHenry RodriguezPas encore d'évaluation
- Planificación y Control de La Producción Parcial 1 TeoriaDocument19 pagesPlanificación y Control de La Producción Parcial 1 TeoriamariaPas encore d'évaluation
- Tarea3 JohanDocument39 pagesTarea3 JohanJohan RodriguezPas encore d'évaluation
- Ejercicio de Clases Laboratorio 1Document6 pagesEjercicio de Clases Laboratorio 1Giovana Conde ApazaPas encore d'évaluation
- Automatización de Sistema de Bombeo de Agua PotableDocument2 pagesAutomatización de Sistema de Bombeo de Agua PotableWilson Jamil Martinez VargasPas encore d'évaluation
- Potabilización AguaDocument3 pagesPotabilización AguaUbeiden CifuentesPas encore d'évaluation
- 1er Parcial InstrumentaciónDocument18 pages1er Parcial InstrumentaciónLocura AutomáticaPas encore d'évaluation
- Requerimiento de Usuario - Tanque Con AgitadorDocument5 pagesRequerimiento de Usuario - Tanque Con AgitadorAlysson CamilaPas encore d'évaluation
- 02 Ejercicios Secuenciamiento I 2011Document5 pages02 Ejercicios Secuenciamiento I 2011Julian GonzalezPas encore d'évaluation
- Tipos de UrdidoDocument6 pagesTipos de UrdidoMarin MirandaPas encore d'évaluation
- Fuentes y Tipos de Residuos2013Document93 pagesFuentes y Tipos de Residuos2013Luis Polo CapuñayPas encore d'évaluation
- HeladoDocument22 pagesHeladoBrian MatorelPas encore d'évaluation
- Calidad RDocument6 pagesCalidad RFernando LópezPas encore d'évaluation
- 5 Representacion Grafica de Un ProcesoDocument17 pages5 Representacion Grafica de Un ProcesoBenjamin Ccoicca QuispePas encore d'évaluation
- 1er EXAMEN PARCIAL INSTRUMENTACIÓNDocument6 pages1er EXAMEN PARCIAL INSTRUMENTACIÓNwilPas encore d'évaluation
- Proyecto de Investigación en IngenieríaDocument4 pagesProyecto de Investigación en IngenieríaOzkhar AFPas encore d'évaluation
- Instrumentación IndustrialDocument60 pagesInstrumentación IndustrialEugenioPas encore d'évaluation
- Capacitacion Generalidades BPM y HACCPDocument30 pagesCapacitacion Generalidades BPM y HACCPANYELO RODRIGUEZ ORTEGAPas encore d'évaluation
- Limpiador de tubérculos en secoDocument369 pagesLimpiador de tubérculos en secocarlosyesoPas encore d'évaluation
- Máquina de Inyección de Espuma de PoliuretanoDocument2 pagesMáquina de Inyección de Espuma de Poliuretanosoufi1100% (1)
- Manufactura Esbelta: Caso de Estudio en Una Empresa de Productos EléctricosDocument7 pagesManufactura Esbelta: Caso de Estudio en Una Empresa de Productos EléctricosPaulina GarciaPas encore d'évaluation
- SIMULACIÓN DE PROCESOS EN ESTADO DINÁMICODocument8 pagesSIMULACIÓN DE PROCESOS EN ESTADO DINÁMICOSergio ReynaPas encore d'évaluation
- Dosificadoras para PanDocument16 pagesDosificadoras para PanVane SanchezPas encore d'évaluation
- Presentacion Mantenimiento Materia Parte 2Document39 pagesPresentacion Mantenimiento Materia Parte 2Alex Poma100% (1)
- El Embudo de DemingDocument9 pagesEl Embudo de DemingMonica Denisse Castillo Iracheta0% (1)
- 4.1 - DEPOSITO. Módulo BaseDocument15 pages4.1 - DEPOSITO. Módulo BaseYoel Montañez SilvaPas encore d'évaluation
- Modelo de Programa Higiene y Seguridad en Contextos Reales de Trabajo IIIDocument3 pagesModelo de Programa Higiene y Seguridad en Contextos Reales de Trabajo IIIAnonymous 5rJ3AiPas encore d'évaluation
- Gestion de La Cadena de Suministros (SCM)Document33 pagesGestion de La Cadena de Suministros (SCM)Anonymous V9POKZPas encore d'évaluation
- Guía SMED manufactura esbelta UMSADocument5 pagesGuía SMED manufactura esbelta UMSARemedios Tunqui LoveraPas encore d'évaluation
- Alvarado, Arango, Velasquez. Taller 1Document71 pagesAlvarado, Arango, Velasquez. Taller 1David Santiago Martinez OtaloraPas encore d'évaluation
- Instrucciones y Programacion InventariosDocument3 pagesInstrucciones y Programacion InventariosViviam Jhesenia FajardoPas encore d'évaluation
- Claves de CarrerasDocument1 pageClaves de CarrerasJosue Cofee100% (1)
- Produccion Multietapa y Formulación Del ModeloDocument4 pagesProduccion Multietapa y Formulación Del ModeloAVargasPas encore d'évaluation
- Ejercicios Confort TermicoDocument2 pagesEjercicios Confort TermicoIsabel ArroyoPas encore d'évaluation
- Consultoría para proyecto de desarrolloDocument176 pagesConsultoría para proyecto de desarrolloAlvaro Antonio Flores GavidiaPas encore d'évaluation
- Lechos FluidizadosDocument3 pagesLechos FluidizadosOlguer Díaz ValenciaPas encore d'évaluation
- Examen de Operaciones Unitarias 01 - 2020 CESAR CONTRERASDocument6 pagesExamen de Operaciones Unitarias 01 - 2020 CESAR CONTRERASCesar ContrerasPas encore d'évaluation
- Creacion de Metodo de Cromatografia HPLCDocument28 pagesCreacion de Metodo de Cromatografia HPLCRoger Alfonso Narvaez Cienfuegos100% (1)
- Procesos Industriales POWER POINTDocument11 pagesProcesos Industriales POWER POINTDaniela Lopez IglesiasPas encore d'évaluation
- BPM InstalacionesDocument15 pagesBPM Instalacioneshelbertortiz67% (3)
- 4 Operacion-Mantenimiento Epsas PDFDocument45 pages4 Operacion-Mantenimiento Epsas PDFGhraf VF100% (1)
- Elaboración de PanetonDocument22 pagesElaboración de PanetonYeckssen FariasPas encore d'évaluation
- GUIA 2 Construcciones e Instalaciones Industriales UMSADocument4 pagesGUIA 2 Construcciones e Instalaciones Industriales UMSAKellyCamachoPas encore d'évaluation
- 43 Ind 841Document4 pages43 Ind 841Mauricio Jarandilla NuñezPas encore d'évaluation
- Advantis FC Sds MX Spanish 2018Document12 pagesAdvantis FC Sds MX Spanish 2018Miguel rodriguez bermudezPas encore d'évaluation
- Control en CascadaDocument24 pagesControl en Cascadamarco_reategui_2Pas encore d'évaluation
- Control calidad polimerización caprolactamaDocument30 pagesControl calidad polimerización caprolactamabeaPas encore d'évaluation
- Aporte Darly Unidad 3 Fase 4Document13 pagesAporte Darly Unidad 3 Fase 4InesFigueroaPas encore d'évaluation
- Iso 22000 Proceso de AzucarDocument18 pagesIso 22000 Proceso de AzucarBertha ElizondoPas encore d'évaluation
- S13.s1 - Clase 13Document54 pagesS13.s1 - Clase 13Franz Huatuco GabrielPas encore d'évaluation
- Tema 2Document14 pagesTema 2leondavid94Pas encore d'évaluation
- Ejercicios Primer Parcial ProcesosDocument8 pagesEjercicios Primer Parcial Procesosleondavid94Pas encore d'évaluation
- Tema 10 - Diseño de TornillosDocument69 pagesTema 10 - Diseño de Tornillosleondavid94Pas encore d'évaluation
- Formato de ImpresionDocument7 pagesFormato de Impresionleondavid94Pas encore d'évaluation
- Esta Di SticasDocument28 pagesEsta Di Sticasleondavid94Pas encore d'évaluation
- Clase de Ley de Coulomb y Campo ElectricoDocument9 pagesClase de Ley de Coulomb y Campo Electricoleondavid94Pas encore d'évaluation
- Analisis Vectorial JumDocument30 pagesAnalisis Vectorial JumlquihuataPas encore d'évaluation
- Sistemas SCADA: Arquitectura y ComponentesDocument31 pagesSistemas SCADA: Arquitectura y ComponentesMichael Reyes DiazPas encore d'évaluation
- Entornos de Desarrollo 1 ºDAWDocument15 pagesEntornos de Desarrollo 1 ºDAWVíctor Joaquín Montoya CalpenaPas encore d'évaluation
- Auto AutoCom AutoElectronicaDocument2 510 pagesAuto AutoCom AutoElectronicaautoelectronicamlPas encore d'évaluation
- LibroVisualBasic BUCARELLYDocument158 pagesLibroVisualBasic BUCARELLYEDuu Scénariste-RastonePas encore d'évaluation
- Fs 1140053Document1 pageFs 1140053Jorge MoralesPas encore d'évaluation
- Planificación CPU PDFDocument34 pagesPlanificación CPU PDFRodrigo HigueraPas encore d'évaluation
- Semáforo inteligente VHDLDocument5 pagesSemáforo inteligente VHDLEDUARDO HUERTA FLORESPas encore d'évaluation
- SCADA sistema guíaDocument2 pagesSCADA sistema guíaEvelin EspinosaPas encore d'évaluation
- CiberseguridadI40 PDFDocument49 pagesCiberseguridadI40 PDFvileni9690Pas encore d'évaluation
- MIW. VGIW. 6. Guion Practico de Analisis y DiesñoDocument93 pagesMIW. VGIW. 6. Guion Practico de Analisis y DiesñoEl boli jesus100% (2)
- Com218 1Document38 pagesCom218 1Josue FPas encore d'évaluation
- Patrones de DiseñoDocument29 pagesPatrones de DiseñoLeonardo GonzalezPas encore d'évaluation
- 0455 - AXE Módulo I (Tomo 01)Document242 pages0455 - AXE Módulo I (Tomo 01)Adrian TolanoPas encore d'évaluation
- SMC Cuaderno de TrabajoDocument69 pagesSMC Cuaderno de TrabajoJonathan EscurraPas encore d'évaluation
- SBC ChinalcoDocument20 pagesSBC ChinalcoMariaDelCarmenCahuanaPas encore d'évaluation
- 00 PresentaciónADocument8 pages00 PresentaciónARoberto Quispe CantoPas encore d'évaluation
- Actividad 3 GaliDocument3 pagesActividad 3 GaliJose Alberto Galindo LeyvaPas encore d'évaluation
- Formato Registro de Convocatoria (2022) 2023Document13 pagesFormato Registro de Convocatoria (2022) 2023yadelsy mejiaPas encore d'évaluation
- UNMSM - Gestion y Evaluacion de Proyectos 2018 - 1 PDFDocument4 pagesUNMSM - Gestion y Evaluacion de Proyectos 2018 - 1 PDFMiguel MendizabalPas encore d'évaluation
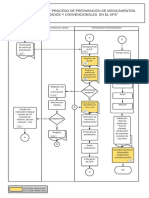
- Flujograma de Registro y Preparación de MedicamentosDocument1 pageFlujograma de Registro y Preparación de MedicamentosDonato OliverPas encore d'évaluation
- Java Taller Gestión DiverCityDocument9 pagesJava Taller Gestión DiverCityhfrqsPas encore d'évaluation
- Practica MRP y AyudaDocument3 pagesPractica MRP y AyudaagmPas encore d'évaluation
- Todo Alrededor de BPM PDFDocument9 pagesTodo Alrededor de BPM PDFEvelyn StefaniaPas encore d'évaluation
- Introducción A La Programación en JavaDocument54 pagesIntroducción A La Programación en JavaKam ZeePas encore d'évaluation
- La Tecnología Aplicada A La Ingeniería IndustrialDocument2 pagesLa Tecnología Aplicada A La Ingeniería IndustrialMiguel NúñezPas encore d'évaluation
- Diferencia Entre Planeacion Estrategica y Pensamiento EstrategicoDocument3 pagesDiferencia Entre Planeacion Estrategica y Pensamiento EstrategicoclubtablerodecomandoPas encore d'évaluation
- Programación Concurrente Con JavaDocument17 pagesProgramación Concurrente Con JavajavipansPas encore d'évaluation
- Azure Developers OriginalDocument140 pagesAzure Developers OriginalPablo SotoPas encore d'évaluation
- Práctica Tap U1-U2jnrsDocument14 pagesPráctica Tap U1-U2jnrsjosePas encore d'évaluation
- Clases y Métodos de Conectividad MySQLDocument13 pagesClases y Métodos de Conectividad MySQLapi-3696445Pas encore d'évaluation