Vous aimerez peut-être aussi
- Instalación de equipos y elementos de sistemas de automatización industrial. ELEM0311D'EverandInstalación de equipos y elementos de sistemas de automatización industrial. ELEM0311Évaluation : 2 sur 5 étoiles2/5 (1)
- Curso de PLC Twido Basico 1ra ParteDocument25 pagesCurso de PLC Twido Basico 1ra PartecheuqueleivaPas encore d'évaluation
- Mantenimiento preventivo de sistemas de automatización industrial. ELEM0311D'EverandMantenimiento preventivo de sistemas de automatización industrial. ELEM0311Évaluation : 4.5 sur 5 étoiles4.5/5 (2)
- Curso de PLC Twido Basico 1ra ParteDocument25 pagesCurso de PLC Twido Basico 1ra ParteGustavo BarreraPas encore d'évaluation
- UF1348 - Monitorización y resolución de incidencias en la interconexión de redes privadas con redes públicasD'EverandUF1348 - Monitorización y resolución de incidencias en la interconexión de redes privadas con redes públicasPas encore d'évaluation
- Curso de Programación PLC 2020 - v2Document45 pagesCurso de Programación PLC 2020 - v2AugustoPas encore d'évaluation
- Reparación de instalaciones automatizadas. ELEE0109D'EverandReparación de instalaciones automatizadas. ELEE0109Pas encore d'évaluation
- U N S A: Universidad Nacional de San AgustinDocument9 pagesU N S A: Universidad Nacional de San AgustinRenato LoayzaPas encore d'évaluation
- Puesta en marcha de sistemas de automatización industrial. ELEM0311D'EverandPuesta en marcha de sistemas de automatización industrial. ELEM0311Évaluation : 3 sur 5 étoiles3/5 (1)
- La EstudiacionDocument6 pagesLa EstudiacionJEAN PIERRE RUIZ ESPINOZAPas encore d'évaluation
- UF1866 - Instalación y configuración de servicios en equipos de telefoníaD'EverandUF1866 - Instalación y configuración de servicios en equipos de telefoníaPas encore d'évaluation
- Tablero de Automatización Nivel 1Document71 pagesTablero de Automatización Nivel 1Jose luis Huata floresPas encore d'évaluation
- Laboratorio 3 - PLC LadderDocument5 pagesLaboratorio 3 - PLC LadderLuis Antonio Yarlequé LópezPas encore d'évaluation
- Introducción A Programación de PLCDocument21 pagesIntroducción A Programación de PLCAugusto100% (1)
- Generalidades de los PLCDocument62 pagesGeneralidades de los PLCjohn100% (7)
- Actividad 3.1Document4 pagesActividad 3.1Luis Alberto GaciaPas encore d'évaluation
- Introduccion Al Control Industrial de ProcesosDocument55 pagesIntroduccion Al Control Industrial de ProcesosCarlos Alberto Socarras BertizPas encore d'évaluation
- Int PLCDocument7 pagesInt PLCwinedlopezPas encore d'évaluation
- COMPLETODocument294 pagesCOMPLETOCesar ZapotPas encore d'évaluation
- PLCDocument64 pagesPLCSebastian MartinezPas encore d'évaluation
- ANTECEDENTES E HISTORIA DE LOS CONTROLADORES LÓGICOS PROGRAMABLES NuevoDocument23 pagesANTECEDENTES E HISTORIA DE LOS CONTROLADORES LÓGICOS PROGRAMABLES NuevoeferPas encore d'évaluation
- Controladores Logicos ProgramablesDocument294 pagesControladores Logicos ProgramablesNorberto RosasPas encore d'évaluation
- Control Lógico Programable PLCDocument22 pagesControl Lógico Programable PLCFabrizio DiazPas encore d'évaluation
- Automatizacion InformeDocument9 pagesAutomatizacion InformebrayanPas encore d'évaluation
- Introducción A La Automatización Con PLC PDFDocument52 pagesIntroducción A La Automatización Con PLC PDFsereucaPas encore d'évaluation
- PLCnsesionn2nSabados 82643a1b521fc92Document19 pagesPLCnsesionn2nSabados 82643a1b521fc92Cristian Camilo Aguirre MárquezPas encore d'évaluation
- Historia de Los PLCDocument18 pagesHistoria de Los PLCjhonslipknot22Pas encore d'évaluation
- Taller PLCSDocument43 pagesTaller PLCSJose Luis Sovero AstoamanPas encore d'évaluation
- Controladoreslogicos CibertecDocument57 pagesControladoreslogicos CibertechernanPas encore d'évaluation
- PLCDocument4 pagesPLCLuis PlataPas encore d'évaluation
- Sistemas de Control IndustrialDocument59 pagesSistemas de Control IndustrialCarlos Alfredo Diaz HernandezPas encore d'évaluation
- Unidad II PLCDocument33 pagesUnidad II PLCLuis Fernando Cruz AmadorPas encore d'évaluation
- Controladores Lógicos Programables (I) : 1.1. IntroducciónDocument19 pagesControladores Lógicos Programables (I) : 1.1. IntroducciónNaincar TorrealbaPas encore d'évaluation
- Soporte III Semana2 PLCDocument46 pagesSoporte III Semana2 PLCgzegoviaPas encore d'évaluation
- Presentación PLCDocument40 pagesPresentación PLCNahuelPas encore d'évaluation
- Elementos Básicos de Electrónica AnalógicaDocument5 pagesElementos Básicos de Electrónica AnalógicaPaulina DíazPas encore d'évaluation
- PLC+S7-200+Ladder Español PDFDocument41 pagesPLC+S7-200+Ladder Español PDFGuillermoAlejandroCajalPas encore d'évaluation
- PLC Controladores Lógicos ProgramablesDocument34 pagesPLC Controladores Lógicos ProgramablesMarcelo MoralesPas encore d'évaluation
- Controladores de ProcesosDocument41 pagesControladores de ProcesosPPAPARICIOPas encore d'évaluation
- Apuntes de PLCDocument43 pagesApuntes de PLCsantigo9100% (1)
- Curso Automatizacion - SchneiderDocument37 pagesCurso Automatizacion - SchneiderCarlosalvPas encore d'évaluation
- Estructura y componentes de un PLCDocument54 pagesEstructura y componentes de un PLCYodakai RiherPas encore d'évaluation
- Controladores Lógicos Programables (I) : 1.1. IntroducciónDocument19 pagesControladores Lógicos Programables (I) : 1.1. IntroducciónJose TomassettiPas encore d'évaluation
- Historia y aplicaciones de los PLCDocument43 pagesHistoria y aplicaciones de los PLCKaren AriasPas encore d'évaluation
- Trabajo PLC Cartilla.Document95 pagesTrabajo PLC Cartilla.oswaldoPas encore d'évaluation
- Apuntes de PLC Unidad 1 y 2Document43 pagesApuntes de PLC Unidad 1 y 2J Leks RoHndezPas encore d'évaluation
- PRACTICA 1. Llenado de TanqueDocument15 pagesPRACTICA 1. Llenado de TanqueIgnacio Toledo BahenaPas encore d'évaluation
- Informe 3 Automatización PDFDocument11 pagesInforme 3 Automatización PDFJuan Esteban Diaz DavilaPas encore d'évaluation
- Presentación PLCDocument53 pagesPresentación PLCALEXANDER PAUL LIQUINCHANA MARTINEZPas encore d'évaluation
- Fundamentos y Caracteristicas de PLC SIEMENSDocument64 pagesFundamentos y Caracteristicas de PLC SIEMENSKevin Dario Noriega VieraPas encore d'évaluation
- Tarea 1 Trabajo de Investigacion Acerca Del PLC Siemens 1200Document13 pagesTarea 1 Trabajo de Investigacion Acerca Del PLC Siemens 1200Valle Moses100% (1)
- Informe de Laboratorio SenaDocument7 pagesInforme de Laboratorio SenastivenPas encore d'évaluation
- Teoría Electrónica IndustrialDocument159 pagesTeoría Electrónica IndustrialPablo Marcelo Tolaba100% (1)
- Semaforo PLCDocument20 pagesSemaforo PLCyeniferPas encore d'évaluation
- Cómo funciona un PLC y sus principales aplicaciones industrialesDocument16 pagesCómo funciona un PLC y sus principales aplicaciones industrialesJorgeluis Qpz100% (2)
- Laboratorio 3 - Programación de PLC's Con LadderDocument4 pagesLaboratorio 3 - Programación de PLC's Con LaddergianPas encore d'évaluation
- Lab Rac PLCDocument8 pagesLab Rac PLCAlex ChallcoPas encore d'évaluation
- PLC Cap1Document13 pagesPLC Cap1Genesis Toledo100% (1)
- PLCDocument14 pagesPLCAbimael SarabiaPas encore d'évaluation
- Conceptos Teoria de ControlDocument55 pagesConceptos Teoria de ControlCarlos Alberto Socarras BertizPas encore d'évaluation
- Curso Domótica: 7 ejercicios vivienda tecnologíaDocument8 pagesCurso Domótica: 7 ejercicios vivienda tecnologíaÁsgeirr Ánsgar Ósgar CanuroPas encore d'évaluation
- Manual en EspañolDocument680 pagesManual en EspañolBladimir Ruiz82% (11)
- Unity v50 - Lenguajes y Estructura Del Programa PDFDocument720 pagesUnity v50 - Lenguajes y Estructura Del Programa PDFGerardo Prada YepesPas encore d'évaluation
- Curso de PLC Twido Basico 2da ParteDocument95 pagesCurso de PLC Twido Basico 2da PartebagopercyPas encore d'évaluation
- TSX 37 Puesta en Marcha-1Document408 pagesTSX 37 Puesta en Marcha-1Jose FranciscoPas encore d'évaluation
- ATV58-Manual de ProgramacionDocument61 pagesATV58-Manual de ProgramacionRober PdrnPas encore d'évaluation
- Unity Pro - Manual de ReferenciaDocument758 pagesUnity Pro - Manual de Referenciaja02mv100% (1)
- Configuración TwidoSoftDocument24 pagesConfiguración TwidoSoftHS SernaPas encore d'évaluation
- Eio0000001952 00Document84 pagesEio0000001952 00bagopercyPas encore d'évaluation
- Eio0000000676 08Document76 pagesEio0000000676 08bagopercyPas encore d'évaluation
- TwidoSuite manualDocument131 pagesTwidoSuite manualMorenada100% (1)
- 1ok Eio0000001363.06Document240 pages1ok Eio0000001363.06bagopercyPas encore d'évaluation
- 04 Variacion de Velocidad y Arranque MotorDocument58 pages04 Variacion de Velocidad y Arranque MotorbagopercyPas encore d'évaluation
- 1ok Eio0000001363.06Document240 pages1ok Eio0000001363.06bagopercyPas encore d'évaluation
- EjercicioDocument9 pagesEjercicioJorge Dario CalizayaPas encore d'évaluation
- La historia de la compra: drama sobre la adicción y el abandonoDocument76 pagesLa historia de la compra: drama sobre la adicción y el abandonoMar Aroko50% (2)
- Transporte, Almacenamiento de Cloro en Plantas de Tratamiento de AguaDocument66 pagesTransporte, Almacenamiento de Cloro en Plantas de Tratamiento de AguaJesús HernándezPas encore d'évaluation
- Itse Instrucciones para Llenado Del Formato DD - JJ .Document3 pagesItse Instrucciones para Llenado Del Formato DD - JJ .Carlos GuerreroPas encore d'évaluation
- Autoevaluación Probabilidad y EstadisticaDocument4 pagesAutoevaluación Probabilidad y EstadisticaMPas encore d'évaluation
- Power Cuello - Segunda ParteDocument57 pagesPower Cuello - Segunda ParteMauro MolinaPas encore d'évaluation
- Informe de internado UNJFSC 2016-2017Document67 pagesInforme de internado UNJFSC 2016-2017Daniela Sebastiani VasquezPas encore d'évaluation
- Ficha Técnica Espárragos y TuercasDocument4 pagesFicha Técnica Espárragos y TuercasHugo Marcelo Valdivia AguileraPas encore d'évaluation
- Equipo CasoOktoberfest PDFDocument5 pagesEquipo CasoOktoberfest PDFKathia Arroyo100% (1)
- SurtidoDocument6 pagesSurtidoyisethk oviedoPas encore d'évaluation
- 18.3.2.toma de DecisionesDocument5 pages18.3.2.toma de DecisionesRicardo QuesadaPas encore d'évaluation
- La Madera en La ConstrucciónDocument25 pagesLa Madera en La ConstrucciónItzel Mac0% (1)
- Musculos de La PelvisDocument10 pagesMusculos de La PelvisJulio Abelardo Gamio FernandezPas encore d'évaluation
- Power Point Narrativa Pedagógica Práctica IIIDocument15 pagesPower Point Narrativa Pedagógica Práctica IIIMilagros LuceroPas encore d'évaluation
- Planta en Esparrago Verdes'Document23 pagesPlanta en Esparrago Verdes'IA KATTYA MILAGROS MOZCOL VILCHEZPas encore d'évaluation
- Contrato de servicios de decoración y arrendamiento para evento socialDocument5 pagesContrato de servicios de decoración y arrendamiento para evento socialMorales Cordoba Roberthito De La MoraPas encore d'évaluation
- Ejercicios de Graficos de Control Por VariablesDocument29 pagesEjercicios de Graficos de Control Por VariablesCarolina Noble MontesPas encore d'évaluation
- Recuperacion TermicaDocument21 pagesRecuperacion TermicaAdriana SanchezPas encore d'évaluation
- ANÁLISIS ManovaDocument4 pagesANÁLISIS ManovaKaren ContrerasPas encore d'évaluation
- Cursos para Especializacion en Geotecnia y Estabilidad de TaludesDocument7 pagesCursos para Especializacion en Geotecnia y Estabilidad de Taludesandres jaenoPas encore d'évaluation
- Enfermedades Causadas Por Fosoro y Sus CompuestosDocument6 pagesEnfermedades Causadas Por Fosoro y Sus CompuestosJoel ArismendiPas encore d'évaluation
- Fica de Inmuebles de Conservacion HistoricaDocument5 pagesFica de Inmuebles de Conservacion HistoricaEmanuel GascaPas encore d'évaluation
- Functional Programming With Elixir EsDocument29 pagesFunctional Programming With Elixir Eselkinlon0930Pas encore d'évaluation
- Memoria y Paginación Aguirre - JudithDocument3 pagesMemoria y Paginación Aguirre - JudithCesar Daniel GraterolPas encore d'évaluation
- Ruta Aprendizaje - EYM - C02-2023Document21 pagesRuta Aprendizaje - EYM - C02-2023Mauricio E. RecinosPas encore d'évaluation
- Conservatorio de Música de Buenos Aires: Violoncello CIIDocument1 pageConservatorio de Música de Buenos Aires: Violoncello CIIOrquesta Tipica Caleta OliviaPas encore d'évaluation
- Identificacion Puntos Criticos SI... +Document3 pagesIdentificacion Puntos Criticos SI... +cristian felipe ortega ceronPas encore d'évaluation
- Constante CosmológicaDocument3 pagesConstante CosmológicaPipoPas encore d'évaluation
- CabelloDocument5 pagesCabelloHernan Delgadillo MolinaPas encore d'évaluation
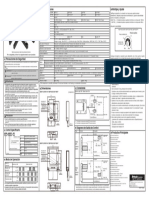
- Autonics Bup Esp ManualDocument1 pageAutonics Bup Esp ManualfchumpitazPas encore d'évaluation
- Tarea 7.1Document6 pagesTarea 7.1Jair AguirrePas encore d'évaluation